技术特征:
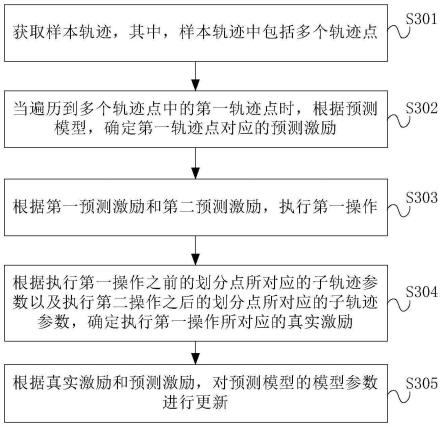
1.一种模型训练方法,包括:获取样本轨迹,其中,所述样本轨迹中包括多个轨迹点;当遍历到所述多个轨迹点中的第一轨迹点时,根据预测模型,确定所述第一轨迹点对应的预测激励,所述预测激励包括将所述第一轨迹点确定为划分点的第一预测激励,以及将所述第一轨迹点确定为非划分点的第二预测激励,其中,在所述多个轨迹点中所确定的相邻的划分点用于构成所述样本轨迹所对应的子轨迹;根据所述第一预测激励和所述第二预测激励,执行第一操作,所述第一操作为将所述第一轨迹点确定为划分点,或者所述第一操作为将所述第一轨迹点确定为非划分点;根据执行所述第一操作之前的划分点所对应的子轨迹参数以及执行所述第一操作之后的划分点所对应的子轨迹参数,确定执行所述第一操作所对应的真实激励,所述子轨迹参数用于指示子轨迹的长度以及子轨迹和所述样本轨迹之间的差异;根据所述真实激励和所述预测激励,对所述预测模型的模型参数进行更新。2.根据权利要求1所述的方法,其特征在于,所述根据预测模型,确定所述第一轨迹点对应的预测激励,包括:在所述多个轨迹点中获取已确定为划分点的目标轨迹点;根据所述目标轨迹点和所述第一轨迹点,确定状态信息,所述状态信息包括所述目标轨迹点对应的子轨迹参数、将所述第一轨迹点确定为划分点所对应的子轨迹参数以及将所述第一轨迹点确定为非划分点所对应的子轨迹参数;将所述状态信息输入所述预测模型,以使得所述预测模型输出所述预测激励。3.根据权利要求2所述的方法,其特征在于,所述根据所述目标轨迹点和所述第一轨迹点,确定状态信息,包括:根据所述目标轨迹点确定至少一个第一子轨迹,根据所述至少一个第一子轨迹的轨迹长度,以及所述至少一个第一子轨迹和所述样本轨迹之间的距离,确定所述目标轨迹点对应的子轨迹参数;根据所述第一轨迹点和多个目标轨迹点中的最后一个目标轨迹点确定第二子轨迹,根据所述第二子轨迹的轨迹长度,以及所述第二子轨迹和所述样本轨迹之间的距离,确定将所述第一轨迹点确定为划分点所对应的子轨迹参数;根据所述第一轨迹点、多个目标轨迹点中的最后一个目标轨迹点以及所述第一轨迹点和最后一个目标轨迹点之间的轨迹点,确定至少一个第三子轨迹,根据所述至少一个第三子轨迹的轨迹长度,以及所述至少一个第三子轨迹和所述样本轨迹之间的距离,确定将所述第一轨迹点确定为非划分点所对应的子轨迹参数。4.根据权利要求1-3任一项所述的方法,其特征在于,所述根据所述第一预测激励和所述第二预测激励,执行第一操作,包括:若所述第一预测激励大于所述第二预测激励,则执行将所述第一轨迹点确定为划分点的第一操作;或者,若所述第一预测激励小于或者等于所述第二预测激励,则执行将所述第一轨迹点确定为非划分点的第一操作。5.根据权利要求1-4任一项所述的方法,其特征在于,所述根据执行所述第一操作之前的划分点所对应的子轨迹参数以及执行所述第一操作之后的划分点所对应的子轨迹参数,
确定执行所述第一操作所对应的真实激励,包括:将执行所述第一操作之前的划分点所对应的子轨迹参数以及执行所述第一操作之后的划分点所对应的子轨迹参数的差值,确定为所述真实激励。6.根据权利要求5所述的方法,其特征在于,所述根据所述真实激励和所述预测激励,对所述预测模型的模型参数进行更新,包括:若所述第一操作为将所述第一轨迹点确定为划分点,则根据所述真实激励和所述第一预测激励确定第一损失函数值,根据所述第一损失函数值对所述预测模型的模型参数进行更新;或者,若所述第一操作为将所述第一轨迹点确定为非划分点,则根据所述真实激励和所述第一预测激励确定第二损失函数值,根据所述第二损失函数值对所述预测模型的模型参数进行更新。7.一种轨迹划分方法,其特征在于,包括:获取待划分的目标轨迹,所述目标轨迹中包括多个轨迹点;当遍历到所述多个轨迹点中的第一轨迹点时,根据预测模型,确定所述第一轨迹点对应的预测激励,所述预测激励包括将所述第一轨迹点确定为划分点的第一预测激励,以及将所述第一轨迹点确定为非划分点的第二预测激励,所述预测模型是根据权利要求1~权利要求6中任一项所述的模型训练方法训练得到的;根据所述预测激励,执行第一操作,所述第一操作为将所述第一轨迹点确定为划分点,或者所述第一操作为将所述第一轨迹点确定为非划分点;根据被确定为划分点的轨迹点,对所述目标轨迹进行划分,得到多个子轨迹。8.根据权利要求7所述的方法,其特征在于,所述根据预测模型,确定所述第一轨迹点对应的预测激励,包括:在所述多个轨迹点中获取已确定为划分点的目标轨迹点;根据所述目标轨迹点和所述第一轨迹点,确定状态信息,所述状态信息包括所述目标轨迹点对应的子轨迹参数、将所述第一轨迹点确定为划分点所对应的子轨迹参数以及将所述第一轨迹点确定为非划分点所对应的子轨迹参数;将所述状态信息输入所述预测模型,以使得所述预测模型输出所述预测激励。9.一种轨迹划分的模型训练装置,其特征在于,包括:获取模块,用于获取样本轨迹,其中,所述样本轨迹中包括多个轨迹点;确定模块,用于当遍历到所述多个轨迹点中的第一轨迹点时,根据预测模型,确定所述第一轨迹点对应的预测激励,所述预测激励包括将所述第一轨迹点确定为划分点的第一预测激励,以及将所述第一轨迹点确定为非划分点的第二预测激励,其中,在所述多个轨迹点中所确定的相邻的划分点用于构成所述样本轨迹所对应的子轨迹;处理模块,用于根据所述第一预测激励和所述第二预测激励,执行第一操作,所述第一操作为将所述第一轨迹点确定为划分点,或者所述第一操作为将所述第一轨迹点确定为非划分点;所述确定模块,用于根据执行所述第一操作之前的划分点所对应的子轨迹参数以及执行所述第一操作之后的划分点所对应的子轨迹参数,确定执行所述第一操作所对应的真实激励,所述子轨迹参数用于指示子轨迹的长度以及子轨迹和所述样本轨迹之间的差异;
更新模块,用于根据所述真实激励和所述预测激励,对所述预测模型的模型参数进行更新。10.一种轨迹划分装置,其特征在于,包括:获取模块,用于获取待划分的目标轨迹,所述目标轨迹中包括多个轨迹点;确定模块,用于当遍历到所述多个轨迹点中的第一轨迹点时,根据预测模型,确定所述第一轨迹点对应的预测激励,所述预测激励包括将所述第一轨迹点确定为划分点的第一预测激励,以及将所述第一轨迹点确定为非划分点的第二预测激励,所述预测模型是根据权利要求1~权利要求6所述的模型训练方法训练得到的;处理模块,用于根据所述预测激励,执行第一操作,所述第一操作为将所述第一轨迹点确定为划分点,或者所述第一操作为将所述第一轨迹点确定为非划分点;所述处理模块还用于,根据被确定为划分点的轨迹点,对所述目标轨迹进行划分,得到多个子轨迹。11.一种电子设备,其特征在于,包括:存储器,用于存储程序;处理器,用于执行所述存储器存储的所述程序,当所述程序被执行时,所述处理器用于执行如权利要求1至6或者权利要求7至8中任一所述的方法。12.一种计算机可读存储介质,其特征在于,包括指令,当其在计算机上运行时,使得计算机执行如权利要求1至6或者权利要求7至8中任一所述的方法。13.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6或者权利要求7至8中任一所述的方法。
技术总结
本申请实施例提供一种轨迹划分的模型训练方法及装置,该方法包括:获取样本轨迹,其中,样本轨迹中包括多个轨迹点。当遍历到多个轨迹点中的第一轨迹点时,根据预测模型,确定第一轨迹点对应的预测激励,预测激励包括将第一轨迹点确定为划分点的第一预测激励,以及将第一轨迹点确定为非划分点的第二预测激励。根据第一预测激励和第二预测激励,执行第一操作。根据执行第一操作之前的划分点所对应的子轨迹参数以及执行第一操作之后的划分点所对应的子轨迹参数,确定执行第一操作所对应的真实激励。根据真实激励和预测激励,对预测模型的模型参数进行更新。本申请提供的方法可以简单有效的实现轨迹划分。单有效的实现轨迹划分。单有效的实现轨迹划分。
技术研发人员:姚斌 梁安琪 谢炯 王波 刘音沛 陈智达 李飞飞
受保护的技术使用者:阿里云计算有限公司
技术研发日:2022.10.25
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。