技术特征:
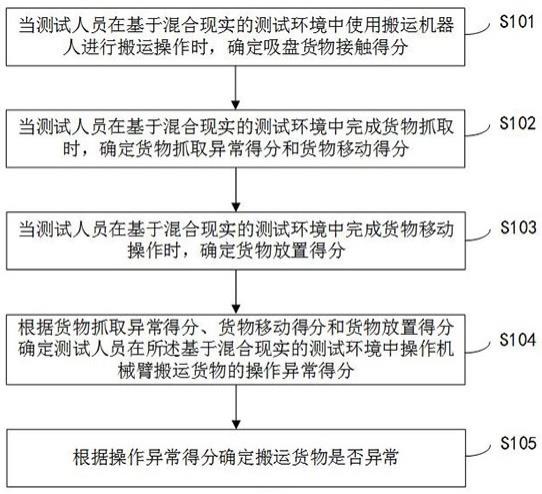
1.一种搬运货物异常检测方法,其特征在于,包括:当测试人员在基于混合现实的测试环境中使用搬运机器人进行搬运操作时,确定吸盘货物接触得分;当所述测试人员在所述基于混合现实的测试环境中完成货物抓取时,确定货物抓取异常得分和货物移动得分;当所述测试人员在所述基于混合现实的测试环境中完成货物移动操作时,确定货物放置得分;根据所述货物抓取异常得分、所述货物移动得分和所述货物放置得分确定测试人员在所述基于混合现实的测试环境中操作机械臂搬运货物的操作异常得分;根据所述操作异常得分确定搬运货物是否异常。2.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,所述确定吸盘货物接触得分,包括:获取所述基于混合现实的测试环境中吸盘底部中央的坐标及长方体货物的坐标,其中为长方体货物上表面的左顶点坐标,为长方体货物上表面的宽,为长方体货物上表面的高,为长方体的竖直高度;当测试人员开始抓取货物时开始计时,每隔时间确定一次吸盘货物接触得分,根据所述吸盘底部中央的坐标以及长方体货物的坐标确定第i次的吸盘货物接触得分通过如下公式确定:其中,表示吸盘底部中央的z轴的坐标,表示长方体货物上表面的左顶点的z轴坐标,为设定的第一判断阈值,为设定的第二判断阈值。3.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,所述确定货物抓取异常得分,包括:当测试人员在所述基于混合现实的测试环境中完成货物抓取时,获取当前时间到测试人员开始抓取货物之间的时间间隔、吸盘货物接触得分的个数、吸盘底部中央的坐标及长方体货物的坐标;根据所述当前时间到测试人员开始抓取货物之间的时间间隔、所述吸盘货物接触得分的个数、所述吸盘底部中央的坐标及所述长方体货物的坐标确定货物抓取异常得分通过如下公式确定:其中,[]为取整函数,为历史数据训练得到的第一修正常数,为设定的第三判断阈值,
为设定的第四判断阈值,为设定的第五判断阈值,;表示第i次的吸盘货物接触得分,表示长方体货物上表面的左顶点x轴坐标, 表示长方体货物上表面的宽,表示长方体货物上表面的左顶点y轴坐标,表示异常碰撞得分。4.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,确定货物移动得分,包括:当所述测试人员在所述基于混合现实的测试环境中完成货物抓取时,开始记录吸盘底部中央坐标,每隔时间记录一个坐标,直至测试人员确认已完成货物移动操作,对于任意相邻的两个坐标:,根据所述任意相邻的两个坐标计算动态速度通过如下公式计算:,从而得到移动过程中的动态速度集合,其中,动态速度集合元素数为,获取测试人员完成货物抓取到测试人员确认已完成货物移动操作之间的时间,根据所述动态速度集合、动态速度集合元素数为以及所述任意相邻的两个坐标计算机械臂移动过程中的异常位移指数通过如下公式计算: 根据所述动态速度集合、动态速度集合元素数为以及所述任意相邻的两个坐标计算机械臂移动过程中的稳定指数通过如下公式计算:
ꢀ
根据所述测试人员完成货物抓取到测试人员确认已完成货物移动操作之间的时间、所述异常位移指数和所述机械臂移动过程中的稳定指数通过如下公式计算货物移动得分:其中,为设定的第六判断阈值,为设定的第七判断阈值,为设定的第八判断阈值,为历史数据训练得到的第二修正常数。5.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,所述确定货物放置得分,包括:获取货物放置的货物槽放置平面的坐标,其中,为货物槽放置平面的左顶点坐标,为货物槽放置平面的宽,为货物槽放置平面的高,每隔时间记录吸盘底部中央坐标得到吸盘的位置轨迹,所述吸盘的位置轨迹元素个数为,获取测试人员从完成货物移动操作到完成货物放置的时间;根据所述货物放置的货物槽放置平面的坐标、所述吸盘底部中央坐标、所述吸盘的位置轨迹、所述吸盘的位置轨迹元素个数为以及长方体货物的坐标通过如下公式计算货物的放置误差指数,其中,
表示吸盘底部中央的x轴的坐标,表示货物槽放置平面的x轴的坐标,表示吸盘底部中央的y轴的坐标,表示货物槽放置平面的y轴的坐标,表示长方体货物上表面的左顶点x轴坐标,表示长方体货物上表面的左顶点y轴坐标,为长方体货物上表面的宽,为长方体货物上表面的高,为设定的第九判断阈值,为设定的第十判断阈值,根据所述吸盘的位置轨迹和所述吸盘的位置轨迹元素个数为,计算货物的放置过程指数货物的放置过程指数 根据货物的放置误差指数、货物的放置过程指数和测试人员从完成货物移动操作到完成货物放置的时间确定货物放置得分,确定货物放置得分通过如下公式确定:其中,为设定的第十一判断阈值,为设定的第十二判断阈值,为设定的第十三判断阈值,为历史数据训练得到的第三修正常数。6.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,所述根据所述货物抓取异常得分、所述货物移动得分和所述货物放置得分确定测试人员在所述基于混合现实的测试环境中操作机械臂搬运货物的操作异常得分,包括:根据所述货物抓取异常得分、所述货物移动得分和所述货物放置得分确定测试人员在所述基于混合现实的测试环境中操作机械臂搬运货物的操作异常得分,通过如下公式确定:其中,为历史数据训练得到的第四修正常数,为历史数据训练得到的第五修正常
数,为历史数据训练得到的第六修正常数,为设定的第十四判断阈值。7.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,根据所述操作异常得分确定搬运货物是否异常,包括:判断所述操作异常得分和数字1的关系;当所述操作异常得分等于1时,确定搬运货物异常,当所述操作异常得分不等于1时,确定搬运货物合格。8.根据权利要求1所述的一种搬运货物异常检测方法,其特征在于,确定吸盘货物接触得分之前,还包括:确定基于混合现实的测试环境中的标准搬运行为数据;根据所述基于混合现实的测试环境中的标准搬运行为数据确定多个判断阈值。9.一种电子设备,其特征在于,包括:处理器和存储器;所述处理器通过调用所述存储器存储的程序或指令,用于执行如权利要求1至8任一项所述一种搬运货物异常检测方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至8任一项所述一种搬运货物异常检测方法。
技术总结
本申请涉及一种搬运货物异常检测方法、电子设备和存储介质,该方法包括:在基于混合现实的测试环境中使用搬运机器人进行搬运操作时,确定吸盘货物接触得分;在基于混合现实的测试环境中完成货物抓取时,确定货物抓取异常得分和货物移动得分;在基于混合现实的测试环境中完成货物移动操作时,确定货物放置得分;根据货物抓取异常得分、货物移动得分和货物放置得分确定在所述基于混合现实的测试环境中操作机械臂搬运货物的操作异常得分;根据操作异常得分确定搬运货物是否异常。本申请将货物搬运过程分为不同的阶段,在不同的阶段确定不同的得分,通过不同的得分确定操作异常得分,通过操作异常得分确定搬运货物是否异常,使得检测过程简单、快捷。快捷。快捷。
技术研发人员:梁帆
受保护的技术使用者:东莞先知大数据有限公司
技术研发日:2022.12.08
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。