技术特征:
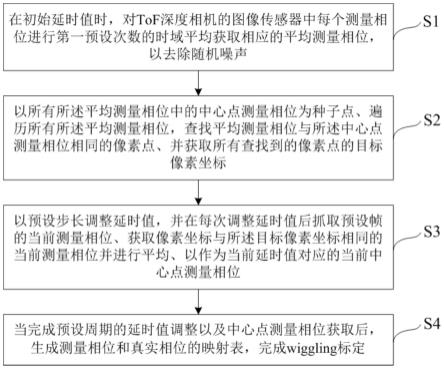
1.一种tof深度相机的标定方法,其特征在于,包括如下步骤:在初始延时值时,对tof深度相机的图像传感器中每个测量相位进行第一预设次数的时域平均获取相应的平均测量相位,以去除随机噪声;以所有所述平均测量相位中的中心点测量相位为种子点、遍历所有所述平均测量相位,查找平均测量相位与所述中心点测量相位相同的像素点、并获取所有查找到的像素点的目标像素坐标;以预设步长调整延时值,并在每次调整延时值后抓取预设帧的当前测量相位、获取像素坐标与所述目标像素坐标相同的当前测量相位并进行平均、以作为当前延时值对应的当前中心点测量相位;以及当完成预设周期的延时值调整以及中心点测量相位获取后,生成测量相位和真实相位的映射表,完成wiggling标定。2.根据权利要求1所述的方法,其特征在于,所述初始延时值为0。3.根据权利要求1所述的方法,其特征在于,所述图像传感器中每个测量相位经过所述第一预设次数的时域平均后,所述随机噪声收敛到一个固定值。4.根据权利要求3所述的方法,其特征在于,所获取的平均测量相位满足以下公式:phase
n,i
=phase
n
ε
n,m
;其中,phase
n,i
为第n个像素点的第i次测量相位,phase
n
为第n个像素点去除随机噪声后的理论测量值,ε
n,m
为m次时域平均后所述随机噪声收敛到的固定值。5.根据权利要求1所述的方法,其特征在于,所述的查找平均测量相位与所述中心点测量相位相同的像素点、并获取所有查找到的像素点的目标像素坐标的步骤进一步包括:若判定所查找到的像素点的数量小于预设数值,则调整所述中心点测量相位后,再次进行遍历,以增加所查找到的像素点的数量。6.根据权利要求1所述的方法,其特征在于,所述预设帧为1帧;所述预设步长为π/4、π/8、π/16的任意其中之一;所述预设周期为2π。7.根据权利要求1所述的方法,其特征在于,所述的在每次调整延时值后抓取预设帧的当前测量相位、获取像素坐标与所述目标像素坐标相同的当前测量相位的步骤进一步包括:在每次调整延时值后抓取预设帧的当前测量相位并存储;以及在所存储的当前测量相位中,查找像素坐标与所述目标像素坐标相同的当前像素点、并获取相应的当前测量相位。8.根据权利要求1所述的方法,其特征在于,所述的生成测量相位和真实相位映射表的步骤进一步包括:采用线性插值方式增加像素点,以补充所述映射表。9.根据权利要求8所述的方法,其特征在于,所述的采用线性插值方式增加像素点,以补充所述映射表的步骤进一步包括:采用以下公式计算待增加像素点所位于的区间段的斜率k:k=(y
j-y
i
)/(x
j-x
i
),其中,x
i
、x
j
为所述区间段两端的测量相位,y
i
为测量相位x
i
对应的真实相位,y
j
为测量相位x
j
对应的真实相位;采用以下任一公式计算截距b:
y
i
=kx
i
b或y
j
=kx
j
b;采用以下公式计算待增加像素点的真实相位:y=kx b,其中,y为待计算真实相位,x为待增加像素点的测量相位,k为所述斜率,b为所述截距。10.根据权利要求1所述的方法,其特征在于,所述方法在生成测量相位和真实相位的映射表之前进一步包括:将所述图像传感器的延时值恢复至默认值。11.一种tof深度相机的标定装置,其特征在于,包括:第一获取模块,用于在初始延时值时,对tof深度相机的图像传感器中每个测量相位进行第一预设次数的时域平均获取相应的平均测量相位,以去除随机噪声;第二获取模块,用于以所有所述平均测量相位中的中心点测量相位为种子点、遍历所有所述平均测量相位,查找平均测量相位与所述中心点测量相位相同的像素点、并获取所有查找到的像素点的目标像素坐标;第三获取模块,用于以预设步长调整延时值,并在每次调整延时值后抓取预设帧的当前测量相位、获取像素坐标与所述目标像素坐标相同的当前测量相位并进行平均、以作为当前延时值对应的当前中心点测量相位;以及生成模块,用于当完成预设周期的延时值调整以及中心点测量相位获取后,生成测量相位和真实相位的映射表,完成wiggling标定。12.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机可执行程序,其特征在于,所述处理器执行所述计算机可执行程序时实现如权利要求1~10任一项所述的tof深度相机的标定方法的步骤。
技术总结
本申请涉及一种ToF深度相机的标定方法及装置、电子设备。所述方法包括:在初始延时值时,对测量相位进行第一预设次数的时域平均获取相应的平均测量相位;以中心点测量相位为种子点、遍历查找测量相位相同的像素点、并获取目标像素坐标;以预设步长调整延时值,并在每次调整延时值后抓取预设帧的当前测量相位、获取与所述目标像素坐标相同的当前测量相位并进行平均、以作为当前延时值对应的当前中心点测量相位;以及当完成预设周期的延时值调整以及相应中心点测量相位获取后,生成测量相位和真实相位的映射表,完成wiggling标定。本申请通过以空域替代时域的方式节省标定时间、降低标定成本,进一步以线性插值方式更加匹配真实的摆动误差。的摆动误差。的摆动误差。
技术研发人员:王昆 朱颖佳 李效白 杨宁昕
受保护的技术使用者:福建杰木科技有限公司
技术研发日:2022.10.20
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。