技术特征:
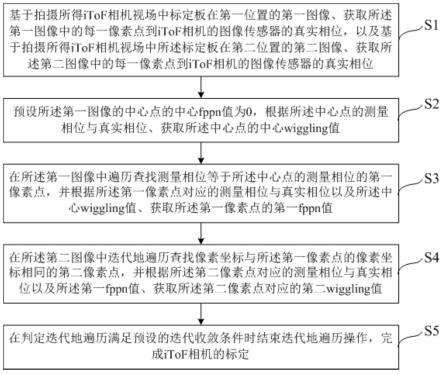
1.一种itof相机的标定方法,其特征在于,包括如下步骤:基于拍摄所得itof相机视场中标定板在第一位置的第一图像、获取所述第一图像中的每一像素点到itof相机的图像传感器的真实相位,以及基于拍摄所得itof相机视场中所述标定板在第二位置的第二图像、获取所述第二图像中的每一像素点到itof相机的图像传感器的真实相位,其中,以lens标定所用棋盘格作为所述标定板,所述第二位置与所述第一位置平行;预设所述第一图像的中心点的中心fppn值为0,根据所述中心点的测量相位与真实相位、获取所述中心点的中心wiggling值;在所述第一图像中遍历查找测量相位等于所述中心点的测量相位的第一像素点,并根据所述第一像素点对应的测量相位与真实相位以及所述中心wiggling值、获取所述第一像素点的第一fppn值;在所述第二图像中迭代地遍历查找像素坐标与所述第一像素点的像素坐标相同的第二像素点,并根据所述第二像素点对应的测量相位与真实相位以及所述第一fppn值、获取所述第二像素点对应的第二wiggling值;在判定迭代地遍历满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定。2.根据权利要求1所述的方法,其特征在于,所述的基于拍摄所得itof相机视场中标定板在第一位置的第一图像,获取所述第一图像中的每一像素点到itof相机的图像传感器的真实相位的步骤进一步包括:以所述棋盘格作为标定板执行lens标定,以确定itof相机的内参矩阵;根据所述内参矩阵,拍摄获取itof相机视场中标定板在第一位置的第一图像,以确定itof相机的外参矩阵;其中,所述棋盘格在所述第一位置具有第一安装倾斜角;根据所述内参矩阵和所述外参矩阵,获取所述第一图像中的每一像素点到所述图像传感器的真实距离;以及根据所述真实距离,获取所述第一图像中的每一像素点到所述图像传感器的真实相位。3.根据权利要求2所述的方法,其特征在于,所述的根据所述内参矩阵和所述外参矩阵,获取所述第一图像中的每一像素点到所述图像传感器的真实距离的步骤进一步包括:根据所述内参矩阵和所述外参矩阵,采用以下坐标转换公式将像素坐标转换为世界坐标:其中,z
c
代表缩放系数,u、v为像素坐标系中一像素点的坐标值,m1对应的矩阵为所述内参矩阵,u0和v0为内参矩阵的中心点,f
x
和f
y
为内参矩阵的焦距,m2对应的矩阵为所述外参矩阵,r是像素坐标系的坐标轴在世界坐标系的坐标轴中的方向矢量,t是从世界坐标系的原点到像素坐标系的原点的平移矢量,x
w
、y
w
、z
w
为世界坐标系中对应点的坐标值;以及
采用以下距离计算公式计算获取所述真实距离d:d=sqrt((x
w
*x
w
) (y
w
*y
w
) (z
w
*z
w
))。4.根据权利要求2所述的方法,其特征在于,所述的根据所述真实距离,获取所述第一图像中的每一像素点到所述图像传感器的真实相位的步骤进一步包括:采用以下公式计算所述真实相位:其中,phase_real为真实相位,d为所述真实距离,f为发射光的调制频率,phase_max为一个相位周期。5.根据权利要求1所述的方法,其特征在于,根据相应像素点的真实相位,采用以下公式计算获取该像素点对应的wiggling值或fppn值:phase_real=wiggling_lut[phase_measure]-fppn
i,j
,其中,phase_real为该像素点的真实相位,wiggling_lut为该像素点的wiggling值,phase_measure为itof相机输出的该像素点的测量相位,fppn
i,j
为该像素点的fppn值。6.根据权利要求1所述的方法,其特征在于,所述迭代收敛条件为:abs(find_pixel_cnt-width*height)<thr,其中,find_pixel_cnt为所查找到的像素点的计数值,width、height分别为itof相机的图像分辨率的宽和高,thr为预设阈值。7.根据权利要求1所述的方法,其特征在于,所述方法进一步包括:在判定迭代地遍历未满足预设的迭代收敛条件时,根据所述第二像素点的测量相位以及所述第二wiggling值,继续在所述第二图像中迭代地遍历查找新像素点、进而获取对应fppn值;以及进一步在判定迭代地遍历满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定,在判定迭代地遍历未满足预设的迭代收敛条件时,根据在所述第二图像中查找到的新像素点的像素坐标以及获取的对应fppn值,继续在所述第一图像中迭代地遍历查找新像素点、进而获取对应wiggling值与对应fppn值。8.根据权利要求7所述的方法,其特征在于,所述的继续在所述第二图像中迭代地遍历查找新像素点、进而获取对应fppn值的步骤进一步包括:在所述第二图像中迭代地遍历查找测量相位等于所述第二像素点的测量相位的第三像素点,并根据所述第三像素点对应的测量相位与真实相位以及所述第二wiggling值、获取所述第三像素点的第三fppn值;所述的继续在所述第一图像迭代地遍历查找新像素点、进而获取对应wiggling值与对应fppn值的步骤进一步包括:在所述第一图像中迭代地遍历查找像素坐标与所述第三像素点的像素坐标相同的第四像素点,并根据所述第四像素点对应的测量相位与真实相位以及所述第三fppn值、获取所述第四像素点对应的第四wiggling值,并在满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定;在判定迭代地遍历未满足预设的迭代收敛条件时,在所述第一图像中迭代地遍历查找
测量相位等于所述第四像素点的测量相位的第五像素点,并根据所述第五像素点对应的测量相位与真实相位以及所述第四wiggling值、获取所述第五像素点的第五fppn值,并在满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定。9.一种itof相机的标定装置,其特征在于,包括:第一获取模块,用于基于拍摄所得itof相机视场中标定板在第一位置的第一图像、获取所述第一图像中的每一像素点到itof相机的图像传感器的真实相位,以及基于拍摄所得itof相机视场中所述标定板在第二位置的第二图像、获取所述第二图像中的每一像素点到itof相机的图像传感器的真实相位,其中,以lens标定所用棋盘格作为所述标定板,所述第二位置与所述第一位置平行;第二获取模块,用于在预设所述第一图像的中心点的中心fppn值为0时,根据所述中心点的测量相位与真实相位、获取所述中心点的中心wiggling值;第一遍历模块,用于在所述第一图像中遍历查找测量相位等于所述中心点测量相位的第一像素点,并根据所述第一像素点对应的测量相位与真实相位以及所述中心wiggling值、获取所述第一像素点的第一fppn值;第二遍历模块,用于在所述第二图像中迭代地遍历查找像素坐标与所述第一像素点的像素坐标相同的第二像素点,并根据所述第二像素点对应的测量相位与真实相位以及所述第一fppn值、获取所述第二像素点对应的第二wiggling值;以及处理模块,用于在判定迭代地遍历满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定。10.根据权利要求9所述的装置,其特征在于,所述处理模块进一步用于在判定迭代地遍历未满足预设的迭代收敛条件时,调用所述第二遍历模块以根据所述第二像素点的测量相位以及所述第二wiggling值,继续在所述第二图像中迭代地遍历查找新像素点、进而获取对应fppn值;所述处理模块进一步用于在判定迭代地遍历满足预设的迭代收敛条件时结束迭代地遍历操作,完成itof相机的标定,在判定迭代地遍历未满足预设的迭代收敛条件时,调用所述第一遍历模块以根据在所述第二图像中查找到的新像素点的像素坐标以及获取的对应fppn值,继续在所述第一图像中迭代地遍历查找新像素点、进而及获取对应wiggling值与对应fppn值。11.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机可执行程序,其特征在于,所述处理器执行所述计算机可执行程序时实现如权利要求1~8任一项所述的itof相机的标定方法的步骤。
技术总结
本发明涉及一种iToF相机的标定方法及装置、电子设备。所述方法包括:获取不同位置图像中的每一像素点到iToF相机的图像传感器的真实相位;预设根据所述中心点的测量相位与真实相位、获取中心点的中心wiggling值;在所述第一图像中遍历查找测量相位等于所述中心点的测量相位的第一像素点,并获取其fppn值;在所述第二图像中迭代地遍历查找像素坐标与第一像素点的像素坐标相同的第二像素点,并获取其第二wiggling值;在判定迭代地遍历满足预设的迭代收敛条件时结束迭代地遍历操作,完成iToF相机的标定。本发明通过基于lens标定的棋盘格作为标定板结合通过迭代地遍历查找像素点的方式,只需要获取两个不同位置的标定板图像,降低了标定所需时间、节省标定成本。节省标定成本。节省标定成本。
技术研发人员:胡波 张东升 朱颖佳 胡涛
受保护的技术使用者:福建杰木科技有限公司
技术研发日:2022.10.20
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。