技术特征:
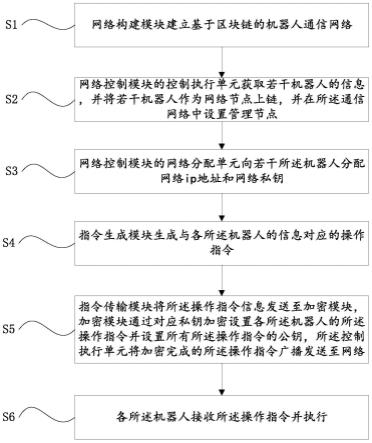
1.一种基于机器人与区块链osi协议多点通信方法,其特征在于,包括:步骤s1、网络构建模块建立基于区块链的机器人通信网络;步骤s2、网络控制模块的控制执行单元获取若干机器人的信息,并将若干机器人作为网络节点上链,并在所述通信网络中设置管理节点;步骤s3、网络控制模块的网络分配单元向若干所述机器人分配网络ip地址和网络私钥;步骤s4、指令生成模块生成与各所述机器人的信息对应的操作指令;步骤s5、指令传输模块将所述操作指令信息发送至加密模块,加密模块通过对应私钥加密设置各所述机器人的所述操作指令并设置所有所述操作指令的公钥,所述控制执行单元将加密完成的所述操作指令广播发送至网络;步骤s6、各所述机器人接收所述操作指令并执行。2.根据权利要求1所述的基于机器人与区块链osi协议多点通信方法,其特征在于,在所述步骤s2中,当在所述通信网络中设置管理节点时,所述控制执行单元获取指令生成模块生成的若干操作指令,并发送预设数量的操作指令至若干所述机器人,所述网络控制模块的反馈识别单元获取若干所述机器人的对操作指令的平均反馈速率w,并根据该平均反馈速率w与预设反馈速率w0的比对结果初步确定若干所述机器人执行所述操作指令是否达标,若w≥w0,所述控制执行单元确定若干所述机器人执行所述操作指令达标;若w<w0,所述控制执行单元确定若干所述机器人执行所述操作指令不达标。3.根据权利要求2所述的基于机器人与区块链osi协议多点通信方法,其特征在于,在所述步骤s2中,当所述控制执行单元确定若干所述机器人执行所述操作指令达标时,所述控制执行单元计算所述平均反馈速率w和预设反馈速率w0的速率差值cw,设定cw=w0-w,并根据该速率差值和预设速率差值的比对结果初步确定设置所述管理节点的数量,其中,所述控制执行单元设有第一预设反馈速率差值cw1、第二预设反馈速率差值cw2、第一管理节点数量a1、第二管理节点数量a2以及第三管理节点数量a3,其中w1<w2,a1<a2<a3,当cw≤cw1时,所述控制执行单元初步确定所述管理节点数量为a3;当cw1<cw≤cw2时,所述控制执行单元初步确定所述管理节点数量为a2;当cw>cw2时,所述控制执行单元初步确定所述管理节点数量为a3。4.根据权利要求3所述的基于机器人与区块链osi协议多点通信方法,其特征在于,在所述步骤s6中,当各所述机器人接收所述操作指令并执行时,所述控制执行单元确定各所述机器人执行所述操作指令的完整度y,设定其中,r为操作指令执行数量,r0为操作指令总数量,α为操作指令执行数量权值,g为操作指令中单个操作的位移量,g0为操作指令中单个操作的标准位移量,β为操作指令中单个操作的位移量权值。5.根据权利要求4所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元确定所述完整度完成时,根据所述完整度y与预设完整度y0的比对结果
确定各所述机器人的操作指令的执行是否合格,若y≥y0,所述控制执行单元判定所述机器人的操作指令执行合格;若y<y0,所述控制执行单元判定所述机器人的操作指令执行不合格。6.根据权利要求5所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元判定所述机器人的操作指令执行合格时,所述控制执行单元获取数据存储单元中存储的所述机器人的历史运行数据,并根据所述历史运行数据确定各所述机器人的执行合格率s,设定s=t/tz,并根据该执行合格率s和预设执行合格率s0的比对结果确定各所述机器人是否可作为管理节点,其中t为历史运行数据中执行操作指令的合格次数,tz为历史运行数据中执行操作指令的总次数,若s≥s0,所述控制执行单元确定所述机器人可作为管理节点;若s<s0,所述控制执行单元确定所述机器人不可作为管理节点。7.根据权利要求6所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元判定所述机器人的操作指令执行不合格时,所述控制执行单元统计执行不合格的所述机器人的不合格数量d,并根据该不合格数量d和预设不合格数量的比对结果确定是否对所述管理节点数量进行调节,其中所述控制执行单元设有第一预设不合格数量d1和第二预设不合格数量d2,当d≤d1时,所述控制执行单元判定不对所述管理节点的数量进行调节;当d1<d≤d1时,所述控制执行单元初步判定对所述管理节点数量进行调整;当d>d2时,所述控制执行单元判定对所述管理节点数量进行调整。8.根据权利要求7所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元判定对所述管理节点数量进行调节时,所述控制执行单元计算所述不合格数量d和第二预设不合格数量d2的数量比值b1,设定b1=d/d2,并根据该数量比值和预设数量比值的比对结果选取对应的调节系数对所述管理节点数量进行调节,所述控制执行单元将调节后的所述管理节点数量设置为a4,设定a4=an
×
ki,其中ki为管理节点数量的调节系数,n=1,2,3。9.根据权利要求7所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元初步判定对所述管理节点数量进行调节时,所述控制执行单元获取所述指令传输模块传输的所述操作指令的复杂度f,设定f=u/uz,并根据该复杂度f和预设复杂度f0的比对结果确定是否调节所述管理节点数量,其中u为所述操作指令中不同种类操作的种类数量,uz为所述操作指令中操作的总数量,若f≥f0,所述控制执行单元判定对所述管理节点数量进行补偿;若f<f0,所述控制执行单元判定不对所述管理节点数量进行补偿。10.根据权利要求9所述的基于机器人与区块链osi协议多点通信方法,其特征在于,当所述控制执行单元判定对所述管理节点数量进行补偿时,所述控制执行单元计算所述复杂度f和预设复杂度f0的复杂度差值δf,设定δf=f-f0,并根据该复杂度差值和预设复杂度差值的比对结果选取对应的补偿系数对所述管理节点数量进行补偿,所述控制执行单元将调节后的所述管理节点数量设置为a5,设定a5=an
×
xe,其中xe为管理节点数量的补偿系数。
技术总结
本发明涉及一种基于机器人与区块链OSI协议多点通信方法,涉及机器人通信技术领域,包括包括网络构建模块建立基于区块链的机器人通信网络;网络控制模块的控制执行单元获取若干机器人的信息,并将若干机器人作为网络节点上链,并在所述通信网络中设置管理节点;网络控制模块的网络分配单元向若干所述机器人分配网络ip地址和网络私钥;指令生成模块生成与各所述机器人的信息对应的操作指令;指令传输模块将所述操作指令信息发送至加密模块,加密模块通过对应私钥加密设置操作指令的公钥,所述控制执行单元将加密完成的所述操作指令广播发送至网络;各所述机器人接收所述操作指令并执行,提高了对于多机器人的协同生产过程的控制精准度。控制精准度。控制精准度。
技术研发人员:温德亮
受保护的技术使用者:上海蜂高科技有限公司
技术研发日:2022.10.19
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。