技术特征:
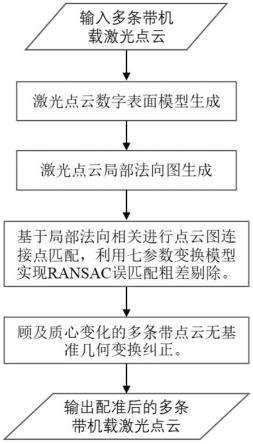
1.一种基于局部法向相关的多条带机载激光点云配准方法,其特征在于,包括以下步骤:s1、获取多条带机载激光点云,根据所有激光脚点的平面坐标获取对应的矩形范围,并对所述矩形范围进行格网划分,计算格网点的高程值,形成数字表面模型;s2、在所述数字表面模型中,计算每个格网点的局部单位法向量及平整度,当任意一个格网点的平整度超过预设阈值时,为该格网点相应的单位法向量映射至rgb彩色空间并为该格网点赋予颜色值,得到点云法向图;s3、对得到的所有点云法向图,判断相互之间是否存在重叠范围,对存在重叠范围的点云法向图,以其中一个为目标图、另一个为参考图,从参考图上选取特征点,在目标图中搜索匹配点,并采用七参数变换模型进行ransac匹配点粗差剔除后,得到多条带点云连接点;s4、根据得到的多条带点云连接点,以七参数变换模型变换前后连接点三维距离残差、各条带点云质心变化量作为联合目标函数,进行多条带点云无基准几何变换纠正,实现多条带点云数据的精确配准。2.根据权利要求1所述的基于局部法向相关的多条带机载激光点云配准方法,其特征在于,在s1中,所述形成数字表面模型,包括如下步骤:s101、在所有激光脚点的平面坐标中筛选x方向最大值、最小值和y方向的最大值和最小值;记为、、、和;根据筛选出来的最值,划定矩形范围;s102、根据一定的采样间隔对所述矩形范围进行格网划分;利用每个格网中心点周围的激光点高程采用双线性内插法,计算格网点的高程值;s103、按照s102的过程遍历所有格网点,得到所有格网点高程,完成数字表面模型的生成。3.根据权利要求1所述的基于局部法向相关的多条带机载激光点云配准方法,其特征在于,在s2中,所述计算每个格网点的局部单位法向量,采用如下方法:s201、在得到的数字表面模型中,选取目标格网点,将周围邻域内的n个格网点取出,记为;根据邻域内的格网点高程值,进行最小二乘平面拟合,得到单位法向量与拟合残差,并用代表该格网点的平整度;s202、判断平整度是否大于预设阈值,若大于,则认为该格网点平整度低,为该点赋予颜色;若不大于,认为该格网点平整度高,为该点赋予颜色;s203、遍历所有格网点,依次执行上述s201-s202的操作,生成点云法向图。4.根据权利要求1所述的基于局部法向相关的多条带机载激光点云配准方法,其特征在于,在s3中,所述从参考图上选取特征点,在目标图中搜索匹配点,包括如下步骤:s301、在得到的参考图中选取有效特征点,取其邻域内的格网点集作为匹配窗
口;根据点的坐标,在目标图中找到对应的位置记为,假设目标图预设的搜索半径为,分别以及其周围范围内的格网点作为模板窗口中心,取邻域内的格网点集作为待匹配窗口,则可得到n=()*()组待匹配点集,记为,分别计算与各点集的相关系数;其中,表示以目标图搜索窗口内第个点作为模板窗口中心时的相关系数,,表示参考图中模板窗口第个格网点的rgb颜色值,表示目标图中模板窗口第个格网点rgb颜色值;s302、将目标图搜索窗口内的点依次作为模板窗口中心,分别计算参考图模板窗口与目标图模板窗口的相关系数,得到一组相关系数值,取该组相关系数值中最大值在目标图中所对应的点位,作为有效特征点 的同名匹配点 ;遍历参考图中的每一个特征点分别进行上述操作,则可实现参考图与目标图的同名点匹配,得到两个点云条带中的一组同名点。5.根据权利要求4所述的基于局部法向相关的多条带机载激光点云配准方法 ,其特征在于,在s301中,所述选取有效的特征点时,采用如下方法:首先,根据颜色选取有效的特征点,若选取的特征点为黑色则该特征点无效;其次,当选取的特征点为其他颜色时,已选取的特征点作为中心点,选取中心点邻域内的各网点集作为匹配窗口,若所述匹配窗口内褐色的格网点数量超过半数,则所述选取的特征点为无效特征点;否则视为有效特征点。6.根据权利要求4所述的基于局部法向相关的多条带机载激光点云配准方法 ,其特征在于,在s3中,采用七参数变换模型进行ransac匹配点粗差剔除后,得到多条带点云连接点,包括如下方法,s311、从多组同名点中随机抽取4对点,假设这四对点为正确匹配点,利用它们计算一组七参数变换模型系数,将该系数记为;s312、利用七参数变换模型系数,将点云中的匹配点坐标转换到点云坐标系下,转换后的坐标记为,计算与对应坐标点的三维距离值,记为,统计其中小于预设误差阈值的个数,记为,则认为该假设的置信度为;s313、重复上述s311至s12,并操作m次,统计m次中置信度最高的假设,若该假设所对应的模型系数为,则利用将点云中的匹配点坐标
转换到点云坐标系下,并计算转换后坐标与中相应坐标的三维距离值,将距离值大于预设误差阈值的匹配点判定为粗差并剔除,则保留下的点均为正确匹配点,作为带点云连接点。7.根据权利要求1所述的基于局部法向相关的多条带机载激光点云配准方法 ,其特征在于,在s4中,进行多条带点云无基准几何变换纠正,包括如下步骤:s401、对得到的多条带点云同名点列出几何变换代价方程,形式如下:式中,为第个点云条带的七参数变换模型系数,为第个点云条带的七参数变换模型系数,为第个点云条带和第个点云条带间第对匹配点坐标,表示两个三维点间的距离函数;s402、对变换前后的各条带点云质心变化量列出代价方程,形式如下:式中,为第个点云条带的七参数变换模型系数,为第个点云数据中的第个点的三维坐标,表示第个点云数据的总点数,表示两个三维点间的距离函数;s403、多条带点云整体几何变换代价值为,其中,w1和w2分别为两类观测值的权矩阵,为单位矩阵,,为点云条带平均偏差大小的先验值;s404、通过s401~s403形成的多条带点云无基准几何变换平差模型,按照最小二乘平差准则,精确求解每个点云条带的七参数变换模型系数,利用变换模型系数进行点云坐标纠正,实现多条带点云数据的整体精确配准。
技术总结
本发明公开了一种基于局部法向相关的多条带机载激光点云配准方法,包括如下过程:获取多条带机载激光点云,根据所有激光脚点的平面坐标获取对应的矩形范围,并对矩形范围进行格网划分,计算格网点的高程值,形成数字表面模型;在数字表面模型中,计算每个格网点的局部单位法向量及平整度,并赋予颜色值,得到点云法向图;对得到的所有点云法向图,从参考图上选取特征点,在目标图中搜索匹配点,进行匹配点粗差剔除后,得到多条带点云连接点;根据得到的多条带点云连接点,进行多条带点云无基准几何变换纠正,实现多条带点云数据的精确配准。实现了机载激光点云条带的全自动配准,无需人工干预,有效避免了野外控制点测量所带来的成本与时间损耗。的成本与时间损耗。的成本与时间损耗。
技术研发人员:王广帅 邓继伟 高文峰 张冠军 赵海 兰树增 聂虎啸 葛玉辉 张英杰 王凯 张文腾 岳亮 高帅 王建强 张金魁
受保护的技术使用者:中国铁路设计集团有限公司
技术研发日:2022.11.24
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。