1.本发明属于接地挂环安装技术领域,具体涉及一种基于无人机辅助上线的带电安装接地挂环机器人。
背景技术:
2.目前,很多10kv配电线路设备需要停电检修时,为了安全起见,户外架空线路电缆的终端头一般装设接地线。接地线的一端与大地连通,其另一端通过接地挂环与线路电缆连通。接地挂环也叫验电接地环,在城镇或者农村地区,高压配电架空线路一般采用绝缘导线。但是目前一些高压绝缘导线在架设过程中没有配置接地挂环,给验电和挂接地线操作带来不便,为解决这一问题,需在输电线路的高压绝缘导线上补装接地挂环。目前在带电导线上加装接地线夹方法为利用绝缘斗臂车将工人输送至近导线端,操作工人穿好绝缘屏蔽服,利用夹具和扭力扳手等工具徒手安装,费时费力。从操作上来说受到空间、高空作业环境等影响,安装难度系数很大,安装不便捷,且速度慢。
技术实现要素:
3.本发明的目的是为了克服现有技术的不足,而提供一种基于无人机辅助上线的带电安装接地挂环机器人,解决了接地挂环人工安装费时费力的技术问题。
4.本发明的目的是这样实现的:一种基于无人机辅助上线的带电安装接地挂环机器人,其包括可拆卸式固定安装在无人机底部外壳上的底板,所述底板上固定设有电控装置、用于为电控装置供电的电池,底板上固定设有两个机械支臂,所述机械支臂的外端设有机械爪;所述底板上固定设有两个左右相互对称的定位装置,底板上固定设有用于卡接接地挂环的推环装置;所述底板上开设有滑槽,所述滑槽的内部滑动连接有第一伸缩杆,所述第一伸缩杆的下端固定设有切线刀头。
5.进一步的,所述机械爪包括与所述机械支臂下端转动连接的竖杆,所述竖杆的下端转动连接有活动杆,所述活动杆的另一端转动连接有掌盘,所述掌盘的侧壁上转动连接有三个指杆,所述指杆均包括第一节、第二节和第三节,且所述第一节的一端与掌盘转动连接,第一节的另一端与所述第二节转动连接,第二节的另一端与所述第三节转动连接,所述第三节的另一端固定设有半球凸起;所述第一节、第二节和第三节的内侧壁上均固定设有防滑弧形凸起。
6.进一步的,所述定位装置包括与所述底板的下表面固定连接的第二伸缩杆,所述伸缩杆的下端固定连接有连接部,所述连接部的前侧壁上转动连接有前弧形握板,连接部的后侧壁上转动连接有后弧形握板,且所述前弧形握板与后弧形握板相对应设置。
7.进一步的,所述推环装置包括固定连接在所述底板下表面上的箱体,所述箱体的侧壁上开设有朝向所述切线刀头方向的槽口,所述槽口的内底面上固定设有朝向槽口开口方向延伸的第三伸缩杆,槽口的内下表面上固定设有滑轨,所述滑轨上滑动连接有所述接地挂环。
8.进一步的,所述接地挂环包括中间板,所述中间板的一侧壁上固定连接有“u”形环柄,所述环柄的边框下表面固定设有与所述滑轨相对应的滑凸;所述中间板的另一侧壁上固定连接有用于卡接电线的卡接装置。
9.进一步的,所述卡接装置包括与中间板固定连接的卡接板,所述卡接板的上端前侧壁固定连接有上挂臂,卡接板的下端前侧壁固定连接有下挂臂,所述下挂壁的内侧壁上开设有弧形槽;所述上挂壁的外端转动连接有卡杆,所述卡杆的下端固定设有弧形部,且所述弧形部延伸至所述弧形槽的内部。
10.进一步的,所述电控装置网络连接有用于操控机械支臂、定位装置、推环装置和切线刀头的遥控器,所述遥控器上设置有显示屏。
11.进一步的,所述底板上开设有多个圆孔,底板通过螺钉贯穿所述圆孔与所述无人机的底部外壳固定连接。
12.进一步的,所述滑轨为两个,且两个滑轨相互平行设置,两个滑轨均朝向所述槽口的开口方向延伸。
13.进一步的,所述滑凸为两个,其一个固定连接在所述环柄的前边框下表面,其另一个固定连接在环柄的后边框下表面。
14.本发明的有益效果:通过在无人机上安装机器人,利用电控装置、机械支臂、定位装置、推环装置和切线刀头的设置,代替人工站在绝缘斗臂车上作业,避免了作用人员穿绝缘屏蔽服爬高上低。通过机器人进行接地挂环的安装,无需作业人员用夹具和扭力扳手等工具进行徒手安装,减轻作业人员的工作负担。使用时,两个定位装置抓持在电线或电缆上对机器人进行位置确定,通过电控装置控制第一伸缩杆伸出,第一伸缩杆在滑槽内部滑动,利用切线刀头将电线或电缆外壁上的绝缘包皮切割裂开,再通过电控装置控制两个机械支臂上的机械爪将绝缘包皮拆下,绝缘包皮拆下后,通过电控装置控制推环装置将接地挂环挂接在电线或电缆上。
附图说明
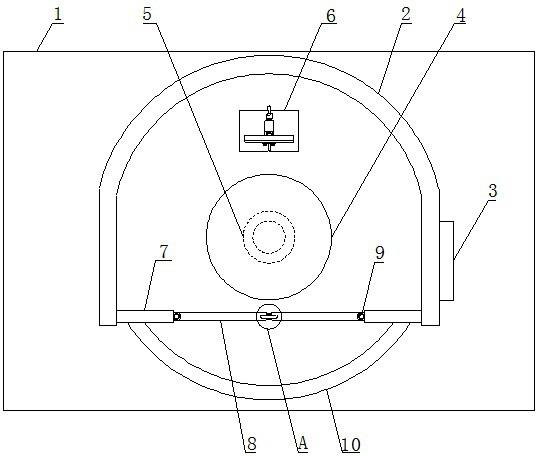
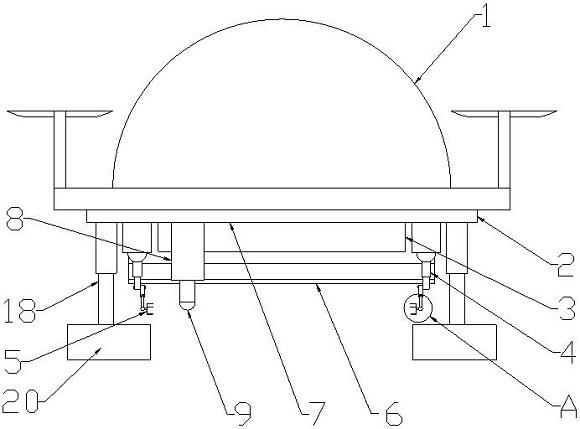
15.图1为本发明的主视结构示意图;图2为本发明的图1中a放大图;图3为本发明的图2中b放大图;图4为本发明的图1中底板俯视结构示意图;图5为本发明的推环装置结构示意图;图6为本发明的图5中接地挂环仰视结构示意图;图7为本发明的图5中c放大图;图8为本发明的定位装置结构示意图。
16.图中:1、无人机
ꢀꢀ
2、底板
ꢀꢀ
3、电控装置
ꢀꢀ
4、机械支臂
ꢀꢀ
5、机械爪
ꢀꢀ
6、推环装置
ꢀꢀ
7、滑槽
ꢀꢀ
8、第一伸缩杆
ꢀꢀ
9、切线刀头
ꢀꢀ
10、竖杆
ꢀꢀ
11、活动杆
ꢀꢀ
12、掌盘
ꢀꢀ
13、第一节
ꢀꢀ
14、第二节
ꢀꢀ
15、第三节
ꢀꢀ
16、半球凸起
ꢀꢀ
17、弧形凸起
ꢀꢀ
18、第二伸缩杆
ꢀꢀ
19、连接部
ꢀꢀ
20、前弧形握板
ꢀꢀ
21、后弧形握板
ꢀꢀ
22、箱体
ꢀꢀ
23、槽口
ꢀꢀ
24、第三伸缩杆
ꢀꢀ
25、滑轨
ꢀꢀ
26、中间板
ꢀꢀ
27、环柄
ꢀꢀ
28、滑凸
ꢀꢀ
29、卡接板
ꢀꢀ
30、上挂臂
ꢀꢀ
31、下挂臂
ꢀꢀ
32、弧形槽
ꢀꢀ
33、卡杆
ꢀꢀ
34、弧形部
ꢀꢀ
35、圆孔
ꢀꢀ
36、电池。
具体实施方式
17.下面结合附图对本发明做进一步的说明,需要指出的是本发明中出现的所有上下前后左右等方位词,均是以图1为参考图做出的方位词,且所有方位词均不对本发明做限定,只是为了更清楚的说明和解释本发明。
18.实施例1如图1-8所示,本实施列公开了一种基于无人机辅助上线的带电安装接地挂环机器人,其包括可拆卸式固定安装在无人机1底部外壳上的底板2,底板2上固定设有电控装置3,底板2上可拆卸式固定设有为电控装置3供电的电池36,电池36为可充电电池。底板2上固定设有两个机械支臂4,机械支臂4的外端设有机械爪5。底板2上固定设有两个左右相互对称的定位装置,底板2上固定设有用于卡接接地挂环的推环装置6。底板2上开设有滑槽7,滑槽7的内部滑动连接有第一伸缩杆8,第一伸缩杆8的下端固定设有切线刀头9。机械爪5包括与机械支臂4下端转动连接的竖杆10,竖杆10的下端转动连接有活动杆11,活动杆11的另一端转动连接有掌盘12,掌盘12的侧壁上转动连接有三个指杆,指杆均包括第一节13、第二节14和第三节15,且第一节13的一端与掌盘12转动连接,第一节13的另一端与第二节14转动连接,第二节14的另一端与第三节15转动连接,第三节15的另一端固定设有半球凸起16。第一节13、第二节14和第三节15的内侧壁上均固定设有防滑弧形凸起17。
19.本实施例通过在无人机上安装机器人,利用电控装置3、机械支臂4、定位装置、推环装置6和切线刀头9的设置,代替人工站在绝缘斗臂车上作业,避免了作用人员穿绝缘屏蔽服爬高上低。通过机器人进行接地挂环的安装,无需作业人员用夹具和扭力扳手等工具进行徒手安装,减轻作业人员的工作负担。使用时,两个定位装置抓持在电线或电缆上对机器人进行位置确定,通过电控装置3控制第一伸缩杆8伸出,第一伸缩杆8在滑槽7内部滑动,利用切线刀头9将电线或电缆外壁上的绝缘包皮切割裂开,再通过电控装置3控制两个机械支臂4上的机械爪5将绝缘包皮拆下,绝缘包皮拆下后,通过电控装置3控制推环装置6将接地挂环挂接在电线或电缆上。
20.实施例2如图1-8所示,本实施列公开了一种基于无人机辅助上线的带电安装接地挂环机器人,其包括可拆卸式固定安装在无人机1底部外壳上的底板2,底板2上固定设有电控装置3、用于为电控装置3供电的电池36,底板2上固定设有两个机械支臂4,机械支臂4的外端设有机械爪5。底板2上固定设有两个左右相互对称的定位装置,底板2上固定设有用于卡接接地挂环的推环装置6。底板2上开设有滑槽7,滑槽7的内部滑动连接有第一伸缩杆8,第一伸缩杆8的下端固定设有切线刀头9。机械爪5包括与机械支臂4下端转动连接的竖杆10,竖杆10的下端转动连接有活动杆11,活动杆11的另一端转动连接有掌盘12,掌盘12的侧壁上转动连接有三个指杆,指杆均包括第一节13、第二节14和第三节15,且第一节13的一端与掌盘12转动连接,第一节13的另一端与第二节14转动连接,第二节14的另一端与第三节15转动连接,第三节15的另一端固定设有半球凸起16。第一节13、第二节14和第三节15的内侧壁上均固定设有防滑弧形凸起17。弧形凸起17的作用是指杆在抓持电线或电缆时,增加电线或电缆与指杆之间的摩擦力,使指杆将电线或电缆抓持的更加牢固。
21.为了更好的效果,定位装置包括与底板2的下表面固定连接的第二伸缩杆18,伸缩杆的下端固定连接有连接部19,连接部19的前侧壁上转动连接有前弧形握板20,连接部19
的后侧壁上转动连接有后弧形握板21,且前弧形握板20与后弧形握板21相对应设置。使用时,电控装置3控制第二伸缩杆18伸出,再控制前弧形握板20与后弧形握板21相互靠拢,牢牢抓持固定在电线或电缆上。
22.为了更好的效果,推环装置6包括固定连接在底板2下表面上的箱体22,箱体22的侧壁上开设有朝向切线刀头9方向的槽口23,槽口23的内底面上固定设有朝向槽口23开口方向延伸的第三伸缩杆24,槽口23的内下表面上固定设有滑轨25,滑轨25上滑动连接有接地挂环。接地挂环包括中间板26,中间板26的一侧壁上固定连接有“u”形环柄27,环柄27的边框下表面固定设有与滑轨25相对应的滑凸28。中间板26的另一侧壁上固定连接有用于卡接电线或电缆的卡接装置。使用时,通过电控装置3控制第三伸缩杆24伸出,第三伸缩杆24推动接地挂环沿着滑轨25滑动,接地挂环从槽口23中滑出通过卡接装置挂接在电线上。
23.为了更好的效果,卡接装置包括与中间板26固定连接的卡接板29,卡接板29的上端前侧壁固定连接有上挂臂30,卡接板29的下端前侧壁固定连接有下挂臂31,下挂壁的内侧壁上开设有弧形槽32。上挂壁的外端转动连接有卡杆33,卡杆33的下端固定设有弧形部34,且弧形部34延伸至弧形槽32的内部。使用时,在卡接装置朝向电线移动的过程中,卡杆33被顶开,卡杆33上端转动,卡杆33的下端被收进至上挂壁与下挂壁内部,电线进入到卡接装置的内部,当电线进入到与卡接板29接触的位置时,卡杆33与电线分离,在重力的作用下,卡杆33的下端自动回到弧形槽32的内部,将电线卡接在卡接装置的内部。
24.为了更好的效果,电控装置3网络连接有用于操控机械支臂4、定位装置、推环装置6和切线刀头9的遥控器,遥控器上设置有显示屏。底板2上开设有多个圆孔35,底板2通过螺钉贯穿圆孔35与无人机1的底部外壳固定连接,使用螺钉将底板2与无人机1固定安装便捷。
25.为了更好的效果,滑轨25为两个,且两个滑轨25相互平行设置,两个滑轨25均朝向槽口23的开口方向延伸。滑凸28为两个,其一个固定连接在环柄27的前边框下表面,其另一个固定连接在环柄27的后边框下表面。
26.本实施例通过在无人机1上安装机器人,利用电控装置3、机械支臂4、定位装置、推环装置6和切线刀头9的设置,代替人工站在绝缘斗臂车上作业,避免了作用人员穿绝缘屏蔽服爬高上低。通过机器人进行接地挂环的安装,无需作业人员用夹具和扭力扳手等工具进行徒手安装,减轻作业人员的工作负担。使用时,两个定位装置抓持在电线或电缆上对机器人进行位置确定,通过电控装置3控制第一伸缩杆8伸出,第一伸缩杆8在滑槽7内部滑动,利用切线刀头9将电线或电缆外壁上的绝缘包皮切割裂开,再通过电控装置3控制两个机械支臂4上的机械爪5将绝缘包皮拆下,绝缘包皮拆下后,通过电控装置3控制推环装置6将接地挂环挂接在电线或电缆上。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。