一种改进的星载can总线时间同步网络及方法
技术领域
1.本发明涉及一种改进的星载can总线时间同步网络及方法,属于星内数据管理总线通信领域。
背景技术:
2.目前卫星内部各单机的时间同步方法有两种:1)利用1pps进行时间同步,2)利用can总线时间广播进行时间同步。
3.利用1pps进行时间同步需要通信双方增加额外的发送/接收硬件电路,并需要在整星电缆网预留点位。利用1pps进行时间同步,可达到十微秒以内的时间同步精度。
4.利用can总线时间广播进行时间同步是较为传统的方式,由星务中心计算机(can总线主节点)发起时间广播,各节点接收后作为时间基准,同步自身时钟,该方法为单向传输,不考虑总线传输延迟和软件处理时间,时间同步误差一般在10ms以上。
技术实现要素:
5.本发明的技术解决问题是:克服现有技术的不足,提出了一种改进的星载can总线时间同步网络和方法,通过双向时间比对的方法,获取主节点与从节点的精确的时间差,并将该时差发送给从节点,可达到200微秒以内的时间同步精度,在不增加硬件的情况下,大幅提高了时间同步精度。
6.本发明的技术解决方案是:
7.本发明公开了一种改进的星载can总线时间同步网络,包括:一个主节点和若干个从节点;其中:
8.主节点:负责向从节点发送通信发起信号;向从节点发送主节点时间帧;每个通信周期的第一个时隙,根据从节点发送的从节点时间帧,计算同步时间差,将同步时间差发送给从节点;
9.从节点:等待接收主节点的通信发起信号,并对通信发起信号进行应答;根据主节点的时间帧,向主节点发送从节点时间帧,根据主节点发送的同步时间差对本地时间进行同步。
10.在上述时间同步网络中,所述根据从节点发送的从节点时间帧,计算同步时间差,将同步时间差发送给从节点,具体步骤为:
11.s21:主节点在主节点时刻t1时刻发送主节点时间给从节点;
12.s22:从节点在从节点时刻t2收到所述主节点时间;
13.s23:从节点在t3时刻将从节点时刻t2发送给主节点;
14.s24:主节点在t4接收到从节点发送的从节点时刻t2后,计算主节点和从节点的时差δt,δt=(-1)
×
((t2-t1)-(t4-t3))/2;其中t3=t2 ti,ti为从节点收到数据到发出数据的时间;
15.s25:重复n次步骤s21~s24,得到n个时差,去掉最大值和最小值后求时差的平均
值,将平均值作为当前的主节点和从节点的同步时间差δt’,将同步时间差发送给从节点。
16.在上述时间同步网络中,所述每个通信周期分为时间同步时隙、遥测数据采集时隙、遥控指令发送时隙。
17.在上述时间同步网络中,主节点每次只同步一个从节点,逐个对从节点进行时间同步。
18.在上述时间同步网络中,时间同步完成后,主节点再进行遥测采集或遥控指令发送操作。
19.在上述时间同步网络中,由主节点发起所有通信,从节点在未收到主节点数据时禁止发送任何数据。
20.在上述时间同步网络中,主节点在时间同步时隙内,等间隔进行各个从节点的时间同步操作。
21.在上述时间同步网络中,can总线采用主从式通信模式,总线通信均由主节点发起。
22.在上述时间同步网络中,每个通信周期为1~3秒。
23.在上述时间同步网络中,n≥5。
24.本发明公开了一种改进的星载can总线时间同步方法,具体步骤为:
25.(1)主节点在主节点时刻t1时刻发送本地时间给从节点;
26.(2)从节点在从节点时刻t2收到主节点时间;
27.(3)从节点在t3时刻将从节点时刻t2发送给主节点;
28.(4)主节点在t4接收到从节点发送的t2后,计算主节点和从节点的时差δt;δt=(-1)
×
((t2-t1)-(t4-t3))/2,其中,t3=t2 ti,ti为从节点收到数据到发出数据的时间。
29.(5)重复步骤(1)~(4)n次,得到n个时差,去掉最大值和最小值后求时差δt的平均值,将平均值作为当前的主节点和从节点的同步时间差δt’,并同步时间差δt’发送给从节点;
30.(6)从节点收到同步时间差δt’后同步本地时间。
31.本发明与现有技术的有益效果在于:
32.(1)本发明方法通过双向时间比对的方法,能够在不增加额外硬件电路的情况下,通过软件的方式大幅提升can总线时间同步精度,达到了200微秒以内的时间同步精度;
33.(2)本发明采用滤波的方式避免了野值对下位机时间信息的影响。
附图说明
34.图1为本发明的can总线网络拓扑图;
35.图2为本发明的can总线网络通信时隙;
36.图3为本发明的can总线时间同步步骤。
具体实施方式
37.下面结合附图及具体实施方式对本发明专利做进一步详细说明。
38.本发明公开了一种改进的星载can总线时间同步网络,包括:一个主节点和若干个从节点;其中:
39.主节点:负责向从节点发送通信发起信号;向从节点发送主节点时间帧;每个通信周期的第一个时隙,根据从节点发送的从节点时间帧,计算同步时间差,将同步时间差发送给从节点;
40.从节点:等待接收主节点的通信发起信号,并对通信发起信号进行应答;根据主节点的时间帧,向主节点发送从节点时间帧,根据主节点发送的同步时间差对本地时间进行同步。
41.根据从节点发送的从节点时间帧,计算同步时间差,将同步时间差发送给从节点,具体步骤为:
42.s21:主节点在主节点时刻t1时刻发送主节点时间给从节点;
43.s22:从节点在从节点时刻t2收到所述主节点时间;
44.s23:从节点在t3时刻将从节点时刻t2发送给主节点;
45.s24:主节点在t4接收到从节点发送的从节点时刻t2后,计算主节点和从节点的时差δt,δt=(-1)
×
((t2-t1)-(t4-t3))/2;其中t3=t2 ti,ti为从节点收到数据到发出数据的时间;
46.s25:重复n次步骤s21~s24,得到n个时差,去掉最大值和最小值后求时差的平均值,将平均值作为当前的主节点和从节点的同步时间差δt’,将同步时间差发送给从节点。n≥5。
47.每个通信周期分为时间同步时隙、遥测数据采集时隙、遥控指令发送时隙。每个通信周期为1~3秒。
48.主节点每次只同步一个从节点,逐个对从节点进行时间同步。
49.时间同步完成后,主节点再进行遥测采集或遥控指令发送操作。
50.由主节点发起所有通信,从节点在未收到主节点数据时禁止发送任何数据。
51.主节点在时间同步时隙内,等间隔进行各个从节点的时间同步操作。
52.can总线采用主从式通信模式,总线通信均由主节点发起。
53.本发明公开了一种改进的星载can总线时间同步方法,具体步骤为:
54.(1)主节点在主节点时刻t1时刻发送本地时间给从节点;
55.(2)从节点在从节点时刻t2收到主节点时间;
56.(3)从节点在t3时刻将从节点时刻t2发送给主节点;
57.(4)主节点在t4接收到从节点发送的t2后,计算主节点和从节点的时差δt;δt=(-1)
×
((t2-t1)-(t4-t3))/2,其中,t3=t2 ti,ti为从节点收到数据到发出数据的时间。
58.(5)重复步骤(1)~(4)n次,得到n个时差,去掉最大值和最小值后求时差δt的平均值,将平均值作为当前的主节点和从节点的同步时间差δt’,并同步时间差δt’发送给从节点;
59.(6)从节点收到同步时间差δt’后同步本地时间。
60.实施例1
61.如图1所示,建立can总线网络拓扑,各节点通过总线的方式将canh、canl连接在同一物理链路上。
62.can总线码速率设置为500kbps,主节点发起所有通信,从节点在未收到主节点数据时禁止发送数据,避免总线出现抢权的情况。
63.can总线采用主从式通信模式,总线通信均由主节点发起,总线数据通信的周期为1秒,每个周期内分为时间同步时隙、遥测数据采集时隙、遥控指令发送时隙,如图2所示,其中时间同步时隙均匀等分为各个节点的时间同步时隙。
64.如图3所示,时间同步步骤为:1)主节点在t1发送本地时间给从节点2)从节点在t2收到主节点时间3)从节点在t3将本地时间t2发送给主节点4)主节点计算主从节点的时差5)以上步骤重复5次,得到5个时差,去掉最大值和最小值后求平均值,将平均值作为当前的两节点时间差,并将该时差δt发送给从节点6)从节点收到时间差后同步本地时间。下位机的t2和t3的时间差一般为固定值(默认为0),并装载在主节点里。
65.时差δt的计算公式为:δt=(-1)*((t2-t1)-(t4-t3))/2,主节点时间超前于从节点,δt为正,主节点时间滞后于从节点,δt为负。
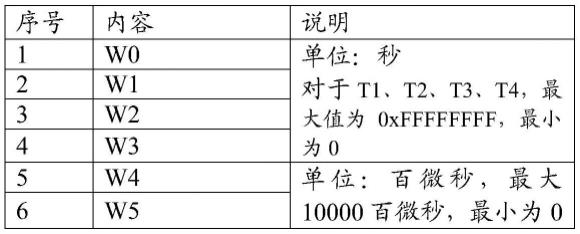
66.主节点和从节点发送的时间信息t1、t2、t3、t4的时间数据长度均为6字节(高字节在前,低字节在后)。主节点星时数据包中发送的是卫星平台时间系统的时间,时间基准为自utc格林威治时间2009年1月1日0时0分0秒起utc整秒的累加值,具体的时间格式详见表1所示。
67.表1时间信息数据内容
[0068][0069]
主节点发送的时差时间信息δt的时间数据长度为6字节(高字节在前,低字节在后),前4字节为秒值的差值,后两字节为百微秒的差值,具体的时间格式详见表2所示。
[0070]
表2时差信息数据内容
[0071][0072]
主节点和从节点发送的时间信息t1、t2、t3、t4及δt的can总线发送格式如表3所示。
[0073]
t3=t2 ti,ti为从节点收到时间数据到发出时间数据的时差,默认为0。
[0074]
表3时间/时差信息数据格式
[0075][0076][0077]
以上所述,仅为本发明最佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
[0078]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。