技术特征:
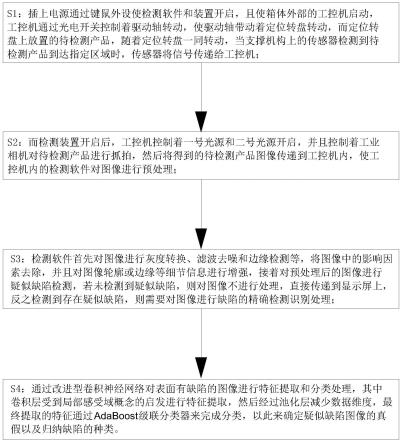
1.一种基于深度学习的表面缺陷检测装置,其特征在于,包括:箱体(1);运输定位模块,所述运输定位模块包括定位转盘(2)、光电开关和驱动轴(21),所述定位转盘(2)在箱体(1)内转动连接,且所述光电开关和驱动轴(21)通过电线与定位转盘(2)相连接,用以将待测产品通过定位转盘(2)运输到拍照位置;图像采集模块,所述图像采集模块包括一号光源(3)、工业相机(31)、二号光源(32)和支撑机构(33),所述支撑机构(33)在箱体(1)内固定连接,且所述支撑机构(33)围绕着定位转盘(2)均匀分布,竖直部位的支撑机构(33)内侧固连有伸缩器(331),而所述一号光源(3)与伸缩器(331)端部相固连,所述工业相机(31)和二号光源(32)位于一号光源(3)上下两侧,且所述一号光源(3)、二号光源(32)和工业相机(31)的中心轴处于同一直线上,而二号光源(32)固连在支撑机构(33)的水平部位内侧;图像预处理模块,所述图像预处理模块用以将原始图片进行灰度处理、滤波去噪、边缘检测、形态学变换和孔洞填充等预处理操作;深度检测图像模块,所述深度检测图像模块用以将预处理后的图像通过深度学习算法和深度学习模型来进行分析处理,最终给出产品表面缺陷检测结果。2.根据权利要求1所述的一种基于深度学习的表面缺陷检测装置,其特征在于:所述一号光源(3)由一号固定板(34)、橡胶膜(341)、二号固定板(342)、伸缩杆(343)和灯泡(344)组成,所述一号固定板(34)和二号固定板(342)与伸缩器(331)端部相固连,而所述橡胶膜(341)两端分别与一号固定板(34)和二号固定板(342)相固连,所述伸缩杆(343)一端与一号固定板(34)相固连,而另一端与所述橡胶膜(341)外侧相固连,且所述橡胶膜(341)内侧固连由灯泡(344)。3.一种基于深度学习的表面缺陷检测装置,其特征在于:该装置适用于上述权利要求1-2中任意一项的所述一种基于深度学习的表面缺陷检测方法,且该装置包括:s1:插上电源通过键鼠外设使检测软件和装置开启,且使箱体(1)外部的工控机启动,工控机通过光电开关控制着驱动轴(21)转动,使驱动轴(21)带动着定位转盘(2)转动,而定位转盘(2)上放置的待检测产品,随着定位转盘(2)一同转动,当支撑机构(33)上的传感器检测到待检测产品到达指定区域时,传感器将信号传递给工控机;s2:而检测装置开启后,工控机控制着一号光源(3)和二号光源(32)开启,并且控制着工业相机(31)对待检测产品进行抓拍,然后将得到的待检测产品图像传递到工控机内,使工控机内的检测软件对图像进行预处理;s3:检测软件首先对图像进行灰度转换、滤波去噪和边缘检测等,将图像中的影响因素去除,并且对图像轮廓或边缘等细节信息进行增强,接着对预处理后的图像进行疑似缺陷检测,若未检测到疑似缺陷,则对图像不进行处理,直接传递到显示屏上,反之检测到存在疑似缺陷,则需要对图像进行缺陷的精确检测识别处理;s4:通过改进型卷积神经网络对表面有缺陷的图像进行特征提取和分类处理,其中卷积层受到局部感受域概念的启发进行特征提取,然后经过池化层减少数据维度,最终提取的特征通过adaboost级联分类器来完成分类,以此来确定疑似缺陷图像的真假以及归纳缺陷的种类。4.根据权利要求3所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s2中,
所述一号光源(3)和二号光源(32)设置为led灯,且led灯的灯光颜色设置有红色、绿色、蓝色和白色。5.根据权利要求3所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s2中,所述灰度转换采用加权均值法将rgb三通道图像转换为单通道灰度图像,用以在进行卷积运算时,减少所消耗的计算资源与时间。6.根据权利要求5所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s2中,所述滤波去操采用高斯滤波算法来复原或重新构建图像,用以消除图像中的噪声,减少噪声对后续算法产生干扰。7.根据权利要求6所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s2中,所述图像边缘通过canny边缘检测方法来缓解图像轮廓模糊现象,用以减少轮廓边缘信息缺失导致影响初步筛选缺陷所需重要信息的情况出现。8.根据权利要求3所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s3中,所述改进型卷积神经网络中,采用dropout层来取代线性模型,用以减少过拟合现象的发生,以及减少深层神经网络的训练时间。9.根据权利要求8所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s3中,所述改进型卷积神经网络的训练方法为反向传播算法,且所述反向传播算法包括前向传播和反向传播。10.根据权利要求9所述的一种基于深度学习的表面缺陷检测方法,其特征在于:s4中,所述改进型卷积神经网络中,训练过程中引入迁移学习方法,且将adaboost级联分类器来代替传统softmax分类器。
技术总结
本发明属于表面缺陷检测技术领域,具体的说是一种基于深度学习的表面缺陷检测装置及检测方法,该检测装置包括箱体、运输定位模块、图像采集模块、图像预处理模块和深度检测图像模块;通过设置伸缩杆、橡胶膜和灯泡,通过伸缩杆来改变橡胶膜的形状,使橡胶膜内侧的灯泡照射角度发生改变,从而使一号光源的打光方式发生改变,以此适应不同类型的待检测产品,相比较于现有手动更换及调节照明装置,本发明操作简单,且能降低检测软件处理图像的难度,提高待检测产品图像的真实性,以及提高检测软件和检测装置的检测精度及检测效率。检测装置的检测精度及检测效率。检测装置的检测精度及检测效率。
技术研发人员:孙业国 刘义红 刘磊 张龙 张科
受保护的技术使用者:淮南师范学院
技术研发日:2022.08.25
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。