1.本发明涉及装卸车系统控制领域,具体指有一种嵌入式集装箱自动装卸车系统的控制方法。
背景技术:
2.集装箱又称货柜,是指具有一定强度、刚度和规格专供周转使用的大型装货容器,将货物放置于集装箱内,再通过集装箱运输至目的地。目前,将货物输送并转运至集装箱内,可以通过装车系统进行输送。装车系统具备码垛、输送等功能。
3.如图10所示,现有的装车方法需要人工将货物放到集装箱的最后的工位,在集装箱的最后的工位装满一垛货物后,再向下一工位进行堆叠货物。这样的操作方法,操作工人以及操作车需要消耗大量的位移时间往返与集装箱内外,存在效率不佳的缺陷。同时,载板上承载足够的货物后,载板与货物的总重量十分巨大,驱动机构推动载板进入集装箱内时,载板和集装箱之间存在较大的摩擦力,载板容易磨损;货物重量较大的情况下,如果需要驱动货物在载板上移动,需要配备功率较大的驱动机构,其体积也较大,且设备昂贵。
4.针对上述的现有技术存在的问题设计一种嵌入式集装箱自动装卸车系统的控制方法是本发明研究的目的。
技术实现要素:
5.针对上述现有技术存在的问题,本发明在于提供一种嵌入式集装箱自动装卸车系统的控制方法,能够有效解决上述现有技术存在的问题。
6.本发明的技术方案是:一种嵌入式集装箱自动装卸车系统的控制方法,基于嵌入式集装箱自动装车系统,所述嵌入式集装箱自动装车系统包括:运输载板,所述运输载板的上端开设有贯穿所述运输载板前端至后端的若干动力轨道和若干无动力轨道;若干动力输送机构,所述动力输送机构的传动件分别设置于所述动力轨道,用于对运输载板上的货物提供静摩擦力从而带动货物;若干无动力输送机构,所述无动力输送机构分别设置于所述无动力轨道,用于对运输载板上的货物提供动摩擦力从而减小所述动力输送机构的驱动力;若干顶升机构;所述无动力输送机构可上下活动设置于所述无动力轨道,所述顶升机构设置于所述无动力轨道和所述无动力输送机构之间,所述顶升机构用于带动所述无动力输送机构上下活动;所述控制方法包括装车控制方法和/或卸车控制方法,所述装车控制方法包括以下步骤:s101,将货物在所述运输载板的前端进行堆叠,在货物堆叠的过程中,检测货物的高度和/或重量;
s102,当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向后运行一段距离,使所述运输载板的前端腾空;s103,重复步骤s101-s102,直至货物装满;所述卸车控制方法包括以下步骤:s201,当所述运输载板的前端货物腾空时,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向前运行,使货物位于所述运输载板的前端;s202,搬离所述运输载板前端的货物,搬离过程中检测货物的高度和/或重量;s203,重复步骤s201-202,直至货物全部卸载。
7.进一步地,所述顶升机构包括气囊和充气装置;所述无动力轨道为下凹结构,所述无动力输送机构包括和所述无动力轨道相配合的活动槽,以及设置于所述活动槽上表面的滚筒传送带,所述活动槽嵌套设置于所述无动力轨道内;所述无动力轨道的底面和活动槽之间间距设置形成气囊腔,所述气囊腔铺设所述气囊,所述气囊连通连接至所述充气装置,所述充气装置对所述气囊充气从而带动所述无动力输送机构上下活动;所述驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,包括:通过所述充气装置对所述气囊充气,使气囊膨胀从而驱动所述无动力输送机构顶靠在货物下端面。
8.进一步地,所述嵌入式集装箱自动装车系统包括气控电磁阀、重力传感器,所述气控电磁阀连接所述气囊,用于控制所述气囊内的气压,所述重力传感器设置于动力输送机构,所述气囊为扁圆结构;所述驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,包括:通过所述重力传感器获取货物对所述动力输送机构的压紧力g,通过所述气控电磁阀调节所述气囊内的气压:所述气囊的上端面面积s*气囊内气压p=(0.5~0.6)压紧力g。
9.进一步地,所述嵌入式集装箱自动装车系统包括若干物体检测传感器和/或若干重力传感器;所述当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,包括:通过所述物体检测传感器检测所述运输载板前端的设定位置是否有物体,若有则控制系统判定所述运输载板的前端堆满货物,通过所述重力传感器检测所述运输载板前端的物体的重力数据,若重力数据达到预定重力数据则控制系统判定所述运输载板的前端堆满货物。
10.进一步地,所述嵌入式集装箱自动装车系统包括限位机构,设置于所述运输载板前端的下方,所述运输载板开设有与所述动力轨道或所述无动力轨道相平行的通孔,所述限位机构包括驱动单元和限位挡块,所述限位挡块可穿过所述通孔凸出于所述通孔的上方,所述驱动单元驱动所述限位挡块在所述通孔内前后移动,从而限定货物的位置。
11.进一步地,步骤s103之后包括:s104,驱动限位机构向后端运行,使限位挡块抵靠在货物前端从而顶紧货物;
步骤s201之前包括:s200,驱动限位机构向前端运行,使限位挡块远离货物前端从而释放货物。
12.进一步地,所述限位机构包括压力传感器,所述压力传感器用于获取所述限位挡块的压力,所述驱动限位机构向后端运行,使限位挡块抵靠在货物前端从而顶紧货物,包括:驱动限位机构向后端运行,获取所述限位机构的压力传感器的数据,当所述限位机构的压力传感器的数据达到设定压力时,所述限位机构停止并保持。
13.因此,本发明提供以下的效果和/或优点:本发明通过积存堆放式的自动装车控制方法,改变了现有需要通过叉车或运输装置将货物首先放置到集装箱的最里端,再依次堆叠,最终堆叠到集装箱的最外端的堆叠方法。通过本装置配合装车控制方法,货物通过输送线输送至车厢内的输送机上,车厢内输送机将第一排货物往前输送一个工位;当第二排货物输送时,第一排货物和第二排货物再一起往前输送一个工位;以此类推,完成整车货物的自动装车作业。采用此积放式输送形式可保证人工取放货时,货物都在车厢口处,节省货物输送时间和洞库的人工地牛装卸车作业时间。
14.本发明通过所述无动力轨道的底面和活动槽之间间距设置形成气囊腔,所述气囊腔铺设所述气囊,气囊的充气或泄气可以实现对活动槽的上顶、下放运动的实现。所述无动力轨道的底面和活动槽之间间距设置形成类似汽车轮胎的气囊腔结构,再通过放置气囊,形成类似轮胎的结构。当无动力输送机构顶靠在货物下端面时,气囊的充气或泄气可以调节气囊内的压力,从而实现调节无动力输送机构对货物的顶升力的调节。可以减小所需动力输送机构的功率或最大传输力,从而减小动力输送机构的体积,减小成本。
15.本发明通过调节所述气囊内的气压,当所述气囊的上端面面积s*气囊内气压p=(0.5~0.6)压紧力g,停止充气装置对所述气囊充气并保持气囊内气压。通过无动力输送机构向上活动到顶靠使货物对动力输送机构的压力减小为货物重力的50-60%,则动力输送机构的驱动力、功率也只需要为未设置无动力输送机构情况下的一半,可以大大减小动力输送机构的功率,还可以保证货物运输时的稳定性。
16.应当明白,本发明的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本发明的进一步的解释。
附图说明
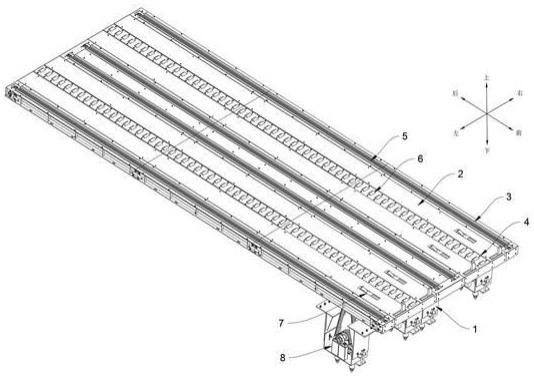
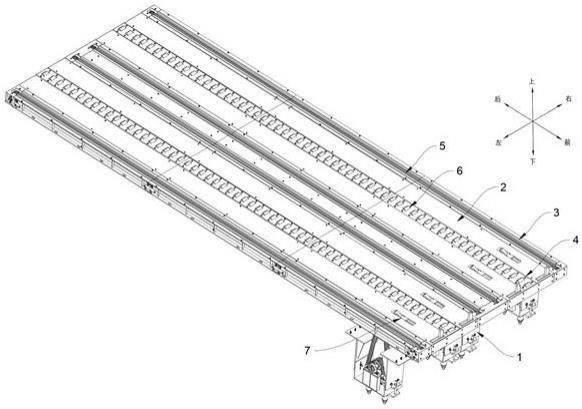
17.图1为嵌入式集装箱自动装车系统的结构示意图。
18.图2为图1的结构爆炸示意图。
19.图3为气囊、无动力轨道、无动力输送机构的结构爆炸示意图。
20.图4为图3的b-b剖视图。
21.图5为限位机构的结构爆炸示意图。
22.图6为限位机构的结构示意图。
23.图7为限位机构的使用状态示意图。
24.图8-9为步骤s102的过程示意图。
25.图10为现有技术装车方法。
具体实施方式
26.为了便于本领域技术人员理解,现将实施例结合附图对本发明的结构作进一步详细描述:参考图1-4,一种嵌入式集装箱自动装卸车系统的控制方法,基于嵌入式集装箱自动装车系统,所述嵌入式集装箱自动装车系统包括:架体1,用于放置或支撑各结构;本实施例中,架体1用于放置或支撑运输载板2、动力输送机构等。并且,本实施例的架体1可以设置于集装车车厢内,也可以设置于集装箱车厢外侧,架体1可以设置有支撑腿,用于对各结构提供相应的位置,只需要根据需求选择合适高度的架体1即可,在此不做限定。
27.运输载板2,平铺设置于所述架体1的上侧,所述运输载板2的上端开设有贯穿所述运输载板2前端至后端的若干动力轨道3和若干无动力轨道4;本实施例中,运输载板2是一个平铺设置的板状结构,运输载板2对本实施例的各部件起到提供设置位置、承放货物等作用,其可以跟随架体1一通设置于集装车车厢内,也可以设置于集装箱车厢外侧。若设置于集装箱车厢外侧,则可以通过架体1将运输载板2承放满货物后,再通过驱动机构将运输载板2和货物一同送入集装箱内。同时,本实施例中,运输载板2开设有若干动力轨道3和若干无动力轨道4用于承放相应的结构,若干动力轨道3和若干无动力轨道4均从运输载板2的前端开设到运输载板2的后端,也就是说运输载板2从头到尾均设置有若干动力轨道3和若干无动力轨道4,使得后续的动力输送机构5和无动力输送机构6也是贯穿运输载板2的前端到运输载板2的后端。因此,在运输载板2上的任意一个位置均可以实现货物运输的功能。
28.同时实施例中,运输载板2可以设置若干组输送机构,每组输送机构均包含动力输送机构5和无动力输送机构6,从而实现在运输载板2上更高效率地同时运输货物。本实施例中,若干组输送机构可以左右对称设置。
29.若干动力输送机构5,所述动力输送机构5的传动件分别设置于所述动力轨道3,用于对运输载板2上的货物提供静摩擦力从而带动货物;本实施例中,动力输送机构5设置于所述动力轨道3,每条所述动力轨道3均设置一个或若干个动力输送机构5。动力输送机构5可以是带有动力的传送链条、油缸、气缸等具有驱动能力的机构,在此不做限定。并且,为了带动获货物从运输载板2的前端向后端运行,动力输送机构5对货物提供的是静摩擦力,以动力输送机构5是传送链条进行举例,将货物放置在输送载板2上时,货物通过其自身的重力压靠在传送链条上,传送链条输送的过程中,传送链条带动货物运行,运行的过程中,传送链条与货物的相对位置是不变的,也就是说传送链条是通过静摩擦力进行输送货物。如果是含有动力的输送滚筒则不适合于本技术,因为其提供的是动摩擦力,也就是说输送滚筒输送货物的过程中,输送滚筒和货物的相对位置是改变的。
30.若干无动力输送机构6,所述无动力输送机构6分别设置于所述无动力轨道4,用于对运输载板2上的货物提供动摩擦力从而减小所述动力输送机构5的驱动力。
31.无动力输送机构6可以是固定设置的,也可以是上下可活动设置的。如果无动力输送机构6是固定设置的,则无动力输送机构6需要设置为与动力输送机构5的高度齐平,并且
本实施例中,动力输送机构5设置于无动力输送机构6的左右两侧,这是因为货物在堆放的过程中,由于自身重力和重心,货物的包装箱或者堆放载板的中间位置会自然地向下略微弯曲,因此,将则无动力输送机构6需要设置为与动力输送机构5的高度齐平,使得货物在输送的过程中,可以将货物的重量的一部分集中到无动力输送机构6,减小货物对动力输送机构5的上方压力,从而在动力输送机构5输送的过程中,只需要更小的静摩擦力即可驱动货物运行,最终实现减小所述动力输送机构5的驱动力的技术效果。
32.在本实施例中,无动力输送机构6也可以是上下可活动设置的。例如通过气缸、液压缸、电动缸、气囊等其中的一种或多种将无动力输送机构6进行驱动,使无动力输送机构6能够上下移动。在运输的过程中,通过例如通过气缸、液压缸、电动缸、气囊等将无动力输送机构6向上驱动并提供一定的驱动力,使其能够顶靠在货物下端并对货物提供向上的顶力,该向上的顶力需要小于货物的本身重量,使货物本身的重力仍然一部分分配在动力输送机构5上,使得动力输送机构5上只需要提供更小的静摩擦力即可驱动货物运行,最终实现减小所述动力输送机构5的驱动力的技术效果。
33.若干顶升机构9;所述无动力输送机构6可上下活动设置于所述无动力轨道4,所述顶升机构设置于所述无动力轨道4和所述无动力输送机构6之间,所述顶升机构9用于带动所述无动力输送机构6上下活动。
34.本实施例中,通过顶升机构9可以驱动无动力输送机构6上下可活动。并且,通过无动力输送机构6向上活动到顶靠在货物或货物托盘的底端时,顶升机构9可以继续对无动力输送机构6进行施加力,使其具有向上运动的趋势,从而可以控制货物对动力输送机构5的压力,进而控制动力输送机构5带动货物移动所需的静摩擦力,从而控制动力输送机构5的驱动力、功率。例如通过无动力输送机构6向上活动到顶靠使货物对动力输送机构5的压力减小为货物重力的50%,则动力输送机构5的驱动力、功率也只需要为未设置无动力输送机构6情况下的一半。从而能够达到省力的效果。
35.所述控制方法包括装车控制方法和/或卸车控制方法,所述装车控制方法包括以下步骤:s101,将货物在所述运输载板的前端进行堆叠,在货物堆叠的过程中,检测货物的高度和/或重量;本步骤中,参考图8左侧,现在运输载板的前端,也就是靠近集装箱开口处,进行货物的堆叠。例如,将货物堆叠在托盘上,每个托盘可以放置3*5的货物。
36.s102,当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向后运行一段距离,使所述运输载板的前端腾空;本步骤中,当货物堆叠满一个托架时,可以检测到检测货物达到相应的位置和/或重量。然后无动力输送机构开始对货物下端面进行上顶,上顶后货物对动力输送机构的压紧力对应减小,此时,启动动力输送机构即可以更小的静摩擦力输送货物,也就是说可以选用更小的功率或最大驱动力的动力输送机构,达到减小驱动电机大小的作用,节约成本。
37.驱动所述动力输送机构带动货物向后运行一段距离,使所述运输载板的前端腾空;达到如图8所示的状态。
38.s103,重复步骤s101-s102,重复的过程中,货物可以不断地堆满后往前运输,得到
如图9所示的状态。
39.多次重复后,直至货物装满,即可完成装车作业。
40.通过积存堆放式的自动装车控制方法,改变了现有需要通过叉车或运输装置将货物首先放置到集装箱的最里端,再依次堆叠,最终堆叠到集装箱的最外端的堆叠方法。通过本装置配合装车控制方法,货物通过输送线输送至车厢内的输送机上,车厢内输送机将第一排货物往前输送一个工位;当第二排货物输送时,第一排货物和第二排货物再一起往前输送一个工位;以此类推,完成整车货物的自动装车作业。采用此积放式输送形式可保证人工取放货时,货物都在车厢口处,节省货物输送时间和洞库的人工地牛装卸车作业时间。
41.所述卸车控制方法包括以下步骤:s201,当所述运输载板的前端货物腾空时,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向前运行,使货物位于所述运输载板的前端;s202,搬离所述运输载板前端的货物,搬离过程中检测货物的高度和/或重量;s203,重复步骤s201-202,直至货物全部卸载。
42.卸车控制方法与装车控制方法的步骤相反,原理类似。
43.参考图3-4,所述顶升机构9包括气囊和充气装置(未画出);所述无动力轨道4为下凹结构,所述无动力输送机构6包括和所述无动力轨道相配合的活动槽602,以及设置于所述活动槽602上表面的滚筒传送带601,所述活动槽602嵌套设置于所述无动力轨道4内;所述无动力轨道4的底面和活动槽602之间间距设置形成气囊腔,所述气囊腔铺设所述气囊,所述气囊连通连接至所述充气装置,所述充气装置对所述气囊充气从而带动所述无动力输送机构6上下活动。
44.本实施例中,通过所述无动力轨道4的底面和活动槽602之间间距设置形成气囊腔,所述气囊腔铺设所述气囊,气囊的充气或泄气可以实现对活动槽602的上顶、下放运动的实现。所述无动力轨道4的底面和活动槽602之间间距设置形成类似汽车轮胎的气囊腔结构,再通过放置气囊,形成类似轮胎的结构。当无动力输送机构6顶靠在货物下端面时,气囊的充气或泄气可以调节气囊内的压力,从而实现调节无动力输送机构6对货物的顶升力的调节。
45.所述驱动所述顶升机构9使所述无动力输送机构6顶靠在货物下端面,包括:通过所述充气装置对所述气囊充气,使气囊膨胀从而驱动所述无动力输送机构6顶靠在货物下端面。
46.进一步地,所述嵌入式集装箱自动装车系统包括气控电磁阀、重力传感器,所述气控电磁阀连接所述气囊,用于控制所述气囊内的气压,所述重力传感器设置于动力输送机构,所述气囊为扁圆结构;所述驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,包括:通过所述重力传感器获取货物对所述动力输送机构的压紧力g,通过所述气控电磁阀调节所述气囊内的气压:所述气囊的上端面面积s*气囊内气压p=(0.5~0.6)压紧力g。
47.本步骤中,货物在输送的过程中,通过顶升机构9的顶升作用,可以将货物的重量的一部分集中到无动力输送机构6,减小货物对动力输送机构5的上方压力,从而在动力输
送机构5输送的过程中,只需要更小的静摩擦力即可驱动货物运行,最终实现减小所述动力输送机构5的驱动力的技术效果。在运输的过程中,通过例如通过气缸、液压缸、电动缸、气囊等将无动力输送机构6向上驱动并提供一定的驱动力,使其能够顶靠在货物下端并对货物提供向上的顶力,该向上的顶力需要小于货物的本身重量,使货物本身的重力仍然一部分分配在动力输送机构5上,使得动力输送机构5上只需要提供更小的静摩擦力即可驱动货物运行,最终实现减小所述动力输送机构5的驱动力的技术效果。
48.例如通过无动力输送机构6向上活动到顶靠使货物对动力输送机构5的压力减小为货物重力的50-60%,则动力输送机构5的驱动力、功率也只需要为未设置无动力输送机构6情况下的一半。从而能够达到省力的效果。
49.由于货物对动力输送机构5的压力与驱动所需的静摩擦力等存在正相关的关系,若顶升机构9对货物的顶升力太大,例如货物重力的90%,则货物移动的过程中容易存在摇晃等情况,若对若顶升机构9对货物的顶升力太小,则无动力输送机构6的所需驱动力变化不明显。因此,本实施例的顶升机构9可以是气缸、油缸、电动缸、气囊等具有可调节无动力输送机构6的顶升力的装置,并且本实施例进一步限定为,顶升机构9对货物的顶升力为货物重力的50-60%。该情况可以大大减小动力输送机构5的功率,还可以保证货物运输时的稳定性。
50.所述嵌入式集装箱自动装车系统包括若干物体检测传感器和/或若干重力传感器;所述当所述运输载板2的前端货物的高度达到预设位置和/或重量达到预设重量,包括:通过所述物体检测传感器检测所述运输载板2前端的设定位置是否有物体,若有则控制系统判定所述运输载板2的前端堆满货物,通过所述重力传感器检测所述运输载板前端2的物体的重力数据,若重力数据达到预定重力数据则控制系统判定所述运输载板2的前端堆满货物。
51.本步骤中,物体检测传感器可以是红外、超声波等传感器,可以检测相应的位置是否有物体阻挡并反射回相应的信号。物体检测传感器需要朝向相应位置的位置。
52.本实施例中,若干物体检测传感器可以设置在集装箱内或者设置在架体1上,或者其他任意位置,只要物体检测传感器可以检测到运输载板2的前端的设定位置是否存在货物即可。所述重力传感器设置于所述运输载板2前端,只要重力传感器能检测到运输载板2的前端是否存在设定重量的货物即可。这是因为,参考图9,当操作人员将货物一个一个地依次向上堆叠在运输载板2的前端时,货物会达到一定的高度,例如图9的左侧中,运输载板2的前端堆叠到第五层,则物体检测传感器可以将设定位置定义为货物堆叠到五层的高度,或者,重力传感器检测到货物堆叠到五层时的重量,此时,控制系统判定输送载板2的前端已经堆满一垛货物。自动装卸车系统在作业时采用积放式输送,即货物通过输送线输送至车厢内的输送机上,车厢内输送机将第一排货物往前输送一个工位;当第二排货物输送时,第一排货物和第二排货物再一起往前输送一个工位;以此类推,完成整车货物的自动装车作业;卸车原理相同。采用此积放式输送形式可保证人工取放货时,货物都在车厢口(运输载板前端)处,节省货物输送时间和洞库的人工地牛装卸车作业时间。
53.参考图5-6,所述嵌入式集装箱自动装车系统包括限位机构7,设置于所述运输载板2前端的下方,所述运输载板2开设有与所述动力轨道3或所述无动力轨道4相平行的通孔
203,所述限位机构7包括驱动单元701和限位挡块703,所述限位挡块703可穿过所述通孔203凸出于所述通孔203的上方,所述驱动单元701驱动所述限位挡块703在所述通孔203内前后移动,从而限定货物的位置,如图7所示。
54.步骤s103之后包括:s104,驱动限位机构向后端运行,使限位挡块抵靠在货物前端从而顶紧货物;步骤s201之前包括:s200,驱动限位机构7向前端运行,使限位挡块703远离货物前端从而释放货物。
55.所述限位机构7包括压力传感器,所述压力传感器用于获取所述限位挡块703的压力,所述驱动限位机构7向后端运行,使限位挡块7抵靠在货物前端从而顶紧货物,包括:驱动限位机构7向后端运行,获取所述限位机构7的压力传感器的数据,当所述限位机构7的压力传感器的数据达到设定压力时,所述限位机构停止并保持。
56.本实施例中,所述运输载板2前端开设有方形的通孔203,该方形的长度方向与所述动力轨道3或所述无动力轨道4相平行,这样的结构可以使得限位挡块703可以在通孔203的长度方向上移动。同时,驱动单元701可以是气缸、油缸、电动缸等,其活塞缸设置所述限位挡块703从而带动限位挡块703一同运行。本实施例中,驱动单元701的活塞缸通过连接座702设置限位挡块703,限位挡块703的一端铰接至连接座702的顶端,限位挡块703和连接座702之间设置有使限位挡块703具有向上运动趋势的弹簧704,在不受外力的情况下,限位挡块703突出于通孔203上方。同时,限位挡块703与连接座702的铰接位置靠近运输载板2的前端,也就是说,当驱动单元701驱动限位挡块703朝前端运动时,限位挡块703可以被通孔203的前端向下压缩从而沉入运输载板2下方,当驱动单元701驱动限位挡块703朝后端运动时,限位挡块703可以重新突出于通孔203上方。
57.限位挡块703的形状设置为,突出于通孔203上方时,限位挡块703朝向运输载板2后端的一面与运输载板2垂直。连接座702设置有用于感知限位挡块703所受压力的压力传感器(未画出)。这么做的原因是,由于货物的规格不同,货物或货物托架在码垛装满运输载板2后,最前端的货物与运输载板2的前端的距离也会不同,因此,本实施例加入限位机构7,可以在货物或货物托架在码垛装满运输载板2后启动驱动单元将限位挡块向运输载板2的后端驱动,当限位挡块抵靠到货物或货物托架后,其压力传感器的压力数值上升,通过对数值的设定,当达到某一数值时,判定为已顶紧物料,驱动单元停止动作,并保持该状态。推头上装有覆盖滑板705,当驱动单元701复位时候,覆盖滑板705遮住通孔203,使输送载板2保持平整状态参考图8,通过限位机构7顶紧物料并保持该状态,可以有效地限制货物或货物载板的位置,从而在集装箱运输的过程中,防止货物出现摇晃、移位等情况。特别是在集装车上坡、下坡的过程中,可以有效固定货物,不会使货物在上下坡的过程中跑位。
58.应当注意的是,在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的部件或步骤。位于部件之前的单词“一”或“一个”不排除存在多个这样的部件。本发明可以借助于包括有若干不同部件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
59.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
60.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
61.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
62.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、
ꢀ“
示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不应理解为必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。