1.本实用新型涉及智能运输技术领域,尤其涉及一种可识别目标颜色的智能搬运小车。
背景技术:
2.颜色识别在现代生产中的应用越来越广泛,无论是遥感技术,工业过程控制,材料分拣识别,图像处理,产品质检,机器人视觉系统,还是某些模糊的探测系统都需要对颜色进行探测。
3.目前,多数具备取放、搬运功能的智能小车,是通过外部信号输入的方式,给定取放的目标,这种方式运作的小车不具备自主判断的能力。在取放目标不同时,无法根据取放目标的不同而自行判定并执行后续的工作任务,仍需依靠外部输入的信号。尤其是在一些可以根据颜色来对目标进行区分的场合,极大的限制智能小车的使用范围。
4.另外,目前的智能小车还存在转向不灵活,配置抓手的智能小车只能抓取固定高度的物品等不足,而且由于整车的大小固定,使用场合受到极大的限制。
技术实现要素:
5.本实用新型提供了一种可识别目标颜色的智能搬运小车,提供了一种灵活拼装的结构、以及可自动识别搬运目标颜色的新型无人驾驶小车。
6.为了实现本实用新型的目的,所采用的技术方案是:一种可识别目标颜色的智能搬运小车,包括拼装车体、抓手组件、主控单元、升降组件和颜色识别传感器,主控单元和升降组件均安装在拼装车体的上方,抓手组件安装在升降组件上,颜色识别传感器设置在抓手组件上,颜色识别传感器将识别的颜色传输给主控单元,主控单元根据识别结果驱动抓手组件动作。
7.作为本实用新型的优化方案,升降组件包括升降舵机、直线导轨、左齿轮臂、右齿轮臂和卷线轮,抓手组件通过左齿轮臂和右齿轮臂安装在直线导轨上,抓手组件通过驱动绳与卷线轮相连接,升降舵机驱动卷线轮旋转控制驱动绳的收放,从而实现抓手组件在直线导轨上的升降。
8.作为本实用新型的优化方案,升降组件还包括限位开关,限位开关安装在升降组件的顶部,当抓手组件运动到最高点时,触发限位开关,升降舵机立即停止驱动卷线轮旋转。
9.作为本实用新型的优化方案,抓手组件包括左夹具、右夹具和抓手开合舵机,左夹具安装在左齿轮臂上,右夹具安装在右齿轮臂上,抓手开合舵机用于驱动左齿轮臂和右齿轮臂张开与合拢,抓手开合舵机与主控单元电连接,颜色识别传感器安装在右夹具的外侧。
10.作为本实用新型的优化方案,主控单元包括主控接线排、主控芯片和动力电源,主控芯片通过主控接线排分别与抓手开合舵机、升降舵机和颜色识别传感器连接,动力电源用于为主控芯片供电。
11.作为本实用新型的优化方案,可识别目标颜色的智能搬运小车还包括驱动轮和万向轮,驱动轮对称的配置在拼装车体的后端,万向轮对称的配置在拼装车体的前端。
12.作为本实用新型的优化方案,拼装车体的底部设置有灰度传感器,用于自主循线,主动运行。
13.本实用新型具有积极的效果:1)本实用新型可以自动识别搬运目标的颜色并执行搬运操作,在一些需要根据颜色进行识别的场合实现了智能和自动化搬运,整体运输效率高;
14.2)本实用新型可实现自主循线,主动运行至目标区;
15.3)本实用新型整体灵活拼装,应用场景广;
16.4)本实用新型抓手组件可以根据搬运目标进行高度升降,应用范围广;
17.5)本实用新型结构简单,稳定性好,精度高,成本低。
附图说明
18.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
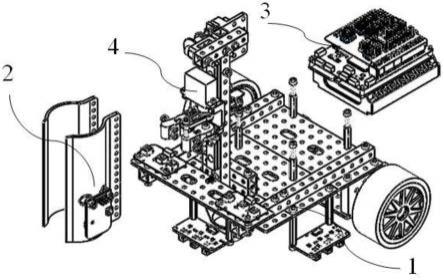
19.图1是本实用新型的整体结构图;
20.图2是本实用新型升降组件的结构示意图;
21.图3是本实用新型抓手组件的结构示意图;
22.图4是本实用新型主控单元的结构示意图;
23.图5是本实用新型车轮的结构示意图。
24.其中:1、拼装车体,2、抓手组件,3、主控单元,4、升降组件,5、颜色识别传感器,41、升降舵机,42、直线导轨,43、限位开关,45、左齿轮臂,46、右齿轮臂,47、卷线轮,31、主控接线排,32、主控芯片,33、动力电源,11、驱动轮,12、万向轮,13、灰度传感器。
具体实施方式
25.如图1所示,本实用新型公开了一种可识别目标颜色的智能搬运小车,包括拼装车体1、抓手组件2、主控单元3、升降组件4和颜色识别传感器5,主控单元3和升降组件4均安装在拼装车体1的上方,抓手组件2安装在升降组件4上,颜色识别传感器5设置在抓手组件2上,颜色识别传感器5将识别的颜色传输给主控单元3,主控单元3根据识别结果驱动抓手组件2动作。其中,拼装车体1采用拼装方式搭建而成,可以根据实际的应用场景进行车体大小和形状的改变,选用部件独立的模块化设计,在保证功能的同时,预留了更多的拼装可能,使得整车结构更加灵活多变,更能适应多种使用需求。颜色识别传感器5实现自主识别抓取目标的颜色和种类,提高整车的工作效率。
26.如图2所示,升降组件4包括升降舵机41、直线导轨42、限位开关43、左齿轮臂45、右齿轮臂46和卷线轮47,抓手组件2通过左齿轮臂45和右齿轮臂46安装在直线导轨42上,抓手组件2通过驱动绳与卷线轮47相连接,升降舵机41驱动卷线轮47旋转控制驱动绳的收放,从而实现抓手组件2在直线导轨42上的升降。通过将抓手组件2安装在直线导轨42上,配合升降舵机41,保证了抓手组件2上下运动的可靠性,扩展了抓手的工作范围。限位开关43安装在升降组件4的顶部,当抓手组件运动到最高点时,触发限位开关43,升降舵机41停止驱动卷线轮47旋转。
27.如图3所示,抓手组件2包括左夹具21、右夹具22和抓手开合舵机23,左夹具21安装在左齿轮臂45上,右夹具22安装在右齿轮臂46上,左齿轮臂45和右齿轮臂46互相啮合,抓手开合舵机23用于驱动左齿轮臂45和右齿轮臂46张开与合拢,抓手开合舵机23与主控单元3电连接。颜色识别传感器5安装在右夹具22的外侧。使得颜色识别传感器5与需要识别的目标距离更近,识别精度更高。
28.如图4所示,主控单元3包括主控接线排31、主控芯片32和动力电源33,主控芯片32通过主控接线排31分别与抓手开合舵机23、升降舵机41和颜色识别传感器5电连接,动力电源33用于为主控芯片32供电。主控芯片32可以收发遥控信号或者内置设定的执行步骤。主控单元3的结构设计设置极大程度的方便了接线、安装和调试。
29.如图5所示,可识别目标颜色的智能搬运小车还包括驱动轮11和万向轮12,驱动轮11对称的配置在拼装车体1的后端,万向轮12对称的配置在拼装车体1的前端。通过设置驱动轮11和万向轮12在保证动力输出的同时,实现灵活转向,整体结构紧凑。
30.拼装车体1的底部设置有灰度传感器13,行驶的路面上安装有白色路径,可识别目标颜色的智能搬运小车通过灰度传感器13在设定的路径上移动。
31.实施时,可识别目标颜色的智能搬运小车通过驱动轮11、万向轮12、灰度传感器13运行到需要识别的目标前方,颜色识别传感器5将识别的颜色传输给主控单元3,主控单元3根据识别结果驱动抓手组件2动作,在此过程中,主控单元3驱动升降组件4使得抓手组件2停留在适合的高度位置,从实现根据目标的颜色进行抓取。
32.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。