技术特征:
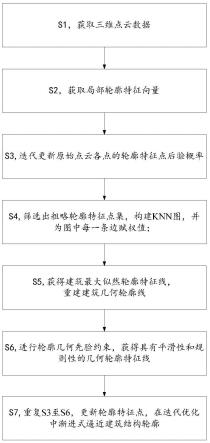
1.一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,包括如下步骤:s1,获取建筑物三维点云数据;s2,对三维点云数据逐点获取局部轮廓特征向量;s3,在构建的局部轮廓特征向量和建筑轮廓特征线的双重约束下,迭代更新原始点云各点的轮廓特征点后验概率;s4,根据轮廓特征点后验概率筛选出粗略轮廓特征点集,构建粗略轮廓特征点的无向带权knn图,并为图中每一条边赋权值;s5,从构建的knn图中搜索权值之和最小连通子图,借助最小生成树算法得到建筑最大似然轮廓特征线,重建建筑几何轮廓线;s6,对生成的建筑最大似然轮廓特征线,进行轮廓几何先验约束,获得具有平滑性和规则性的几何轮廓特征线;s7,重复s3至s6,实现由初始轮廓特征点连接生成轮廓特征线,并在上一次迭代生成的轮廓特征线约束下再次更新轮廓特征点后验概率,从而更新轮廓特征点,在迭代优化中渐进式逼近建筑结构轮廓。2.根据权利要求1所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s1中建筑物三维点云数据为激光雷达扫描设备采集到的建筑点云三维坐标。3.根据权利要求1所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s2中三维点云数据中任一点的局部轮廓特征向量,局部轮廓特征向量的构建过程包括如下子步骤:s21、逐点获取点云局部协方差矩阵特征值;s22,逐点计算点云强度值i;s23,逐点计算点云梯度值;s24,逐点获取点云梯度结构张量特征值。4.根据权利要求3所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s21中以点为中心,固定半径r的邻域球n内存在n个邻域点,邻域点n的几何中心记为,则点的3
×
3局部协方差矩阵为:其中,;采用奇异值分解算法计算协方差矩阵的三个特征值:;为了获取多尺度的邻域信息,邻域半径r分别取建筑点云数据的平均密度的种比例值,从而获取了种不同邻域尺度半径对应的特征值,表示每个点静态邻域尺度的计数数目;s22中i由平面变化率和面状特征量两个几何特征量构成:
其中,平面变化率反映当前点邻域内法向量的变化情况,计算公式为:;面状特征量反映局部点云分布的均匀性,计算公式为:;s23中梯度值反映了点的强度值在局部邻域内的最大变化量以及最大突变方向;当前点的邻域某处点云强度值按照下(3)式采用反距离加权法进行计算,得到解析表达,基于强度表达计算梯度公式如下(4)、(5)式:度表达计算梯度公式如下(4)、(5)式:其中其中其中,为三维空间中某处待计算的点云强度值,为待计算点邻域内邻域点的已知强度值,采用当前点到邻域点的距离平方,为邻域球内的点数;s24中、和是梯度结构张量的三个特征值;按照在三维点云空间中,某点在邻域球n内的梯度变化由不同方向的微小变化量计算,并按照泰勒公式展开为公式(6):式中,3
×
3矩阵为:
其中,n为邻域球n内的点数,第i个邻域点的梯度分量分别为,矩阵表示点及其邻域球n范围内梯度的分布情况,其特征值反映了点强度值在三个特征向量方向梯度的变化情况。5.根据权利要求4所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s3中在局部轮廓特征向量和轮廓特征线的双重约束下,逐点计算各点的轮廓特征点后验概率,为二值标签变量,若该点为轮廓特征点则为1,反之为0;轮廓特征点后验概率包括:点在局部轮廓特征向量约束下为轮廓语义特征点的概率,即;点与轮廓语义特征线的邻近度,轮廓特征点后验概率计算公式为:其中,为权重系数。6.根据权利要求5所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,的取值范围为0.4~0.6。7.根据权利要求5所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,对于点云局部轮廓特征向量约束下为轮廓语义特征点的概率,将所有点的局部特征向量作为输入数据,基于高斯混合模型法计算特征点集与非特征点集,在高维特征空间中两个高斯模型的参数和,从而得到任意一点属于各类别的概率,即:对于点与轮廓语义特征线的邻近度,即点到轮廓语义特征线的最短距离,计算公式为:。8.根据权利要求7所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s4具体包括如下子步骤:s41,根据轮廓特征点后验概率值设置概率阈值,过滤掉那些不可能为轮廓特征点的原始点,得到粗略轮廓特征点集;s42,构建粗略轮廓特征点的knn图,设粗略轮廓特征点集中存在个点,逐点将其与
近邻的k个邻域点连接形成条边,每一条边的权值计算公式为:其中,和分别为s3获得的两个轮廓特征点后验概率,分别简记为和;式中,为两个点和连接成的边是轮廓特征线的概率,它是关于和的函数,计算公式为:其中,为点和点的欧氏距离;当等于时,式(11)分母为0,取来处理这种特殊情况。9.根据权利要求8所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,概率阈值的取值范围为0.6~0.8。10.根据权利要求8所述的一种点线双域互增强建筑几何轮廓线重建方法,其特征在于,s6具体包括如下子步骤:s61,将建筑最大似然轮廓特征线拆分成一系列弧段,任一弧段由树结构中的一系列边连接而成;s62,剔除冗余分支,设置平滑性长度阈值;若弧段上边的数量大于,则保留弧段;否则,认为该弧段为冗余分支,将其从特征线上剔除;s63,设置规则性阈值,对保留下的弧段进行规则化处理,特征线的规则性由对弧段进行visvalingam-whyatt算法获得,使弧段保持规则性。
技术总结
本发明提供了一种点线双域互增强建筑几何轮廓线重建方法,包括:获取建筑物三维点云数据;对三维点云数据逐点获取局部轮廓特征向量;在构建的局部轮廓特征向量和建筑轮廓特征线的双重约束下,迭代更新原始点云各点的轮廓特征点后验概率;筛选出粗略轮廓特征点集,构建粗略轮廓特征点的无向带权KNN图,并为图中每一条边赋权值;搜索权值之和最小连通子图,借助最小生成树算法得到建筑最大似然轮廓特征线,重建建筑几何轮廓线;对生成的建筑最大似然轮廓特征线,进行轮廓几何先验约束,获得具有平滑性和规则性的几何轮廓特征线;更新轮廓特征点,在迭代优化中渐进式逼近建筑结构轮廓。本发明为实景三维建设城市建筑结构化重建提供了新方法。提供了新方法。提供了新方法。
技术研发人员:邓浩 邸少宁 邹艳红 毛先成
受保护的技术使用者:中南大学
技术研发日:2022.12.02
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。