基于平面piv的预测指定声源远场流致噪声的方法
技术领域
1.本发明涉及流体测量领域中的粒子图像测速(piv, particle image velocimetry)技术,具体涉及一种基于平面piv的预测指定声源远场流致噪声的方法。该方法基于平面时间解析piv测量,通过流场压力场重构,声比拟预测,以及展向相关性修正等技术,对指定流场声源的考虑三维效应的流致噪声进行预测。
背景技术:
2.流致噪声是20世纪50年代从流体力学和声学两个基础学科产生出来的交叉学科,主要研究由流体介质流动对声音产生和传播的影响。21世纪以来,民用航空,风力发电,海洋作业等行业快速发展,与此同时带来了不计其数的流致噪声效应,给人民的生产生活带来巨大困扰,流致噪声的机理研究与抑制需求与日俱增。
3.传统的噪声测量诸如空气中的远场麦克风与水下的水听器能直接获取流致噪声,但易引入除关注声源之外的其他流致噪声或环境噪声,甚至设备的噪声如风洞水洞的电机噪声会淹没掉所关注的流致噪声;消声风洞,消声水洞能消除额外的环境噪声,但却存在设备建设成本高昂的限制;麦克风阵列可有效定位特定声源但成本极高。并且以上阐述的噪声测量方式均无法将流场速度信息与噪声直接对应。若需研究流场速度与噪声的直接对应关系又需要同步测量速度场,这样会额外引入新的噪声源,如piv的冷却器噪声等。
4.如专利申请号cn112763180a公开了一种声学风洞内高速列车受电弓模型气动噪声快速预测方法,虽然能快速预测受电弓模型气动噪声,但并未将其与流场结合,并且需要配合实验数据库得到测理论模型的各项系数。需要大量噪声实验测量的同时也无法将流致噪声与流场结合分析。
5.又如专利申请号cn111608927a公开了一种离心泵流场-压力场-声场同步测量的装置和方法。提到了需要用消声水洞抑制节流阀的流致噪声,此外还需要在水听器附近安装抑振器减小管路噪声的水声信号测试的影响。这些用于消除额外环境噪声的改进仪器构建的使用无疑会增大实验的成本与难度。
6.piv测量技术具有非侵入,全局测量的优点。时间解析piv测量则在piv测量技术上拓展了时间维度,能捕捉到流场的高频速度信息,可从中解析出流场的高频动力学特性。通过时间解析piv所测得的流场速度信息直接预测流致噪声,不仅能避免额外声源与环境噪声的引入,而且能将流场速度信息与流致噪声耦合,为流致噪声的抑制技术提供理论指导。
技术实现要素:
7.有鉴于此,本发明旨在提供一种基于平面时间解析piv的预测指定声源远场流致噪声的方法。该方法通过压力场重构,声比拟噪声预测,展向相关性修正等一系列技术,得到考虑三维效应的远场流致噪声。将远场流致噪声与流场耦合,可直观地从流场角度分析流致噪声的产生机理,为后续流致噪声抑制技术提供指导。并在通过平面时间解析piv测量获得流场高频速度信息的同时,附带给出流场的高频压力信息,有利于流场的动力学分析。
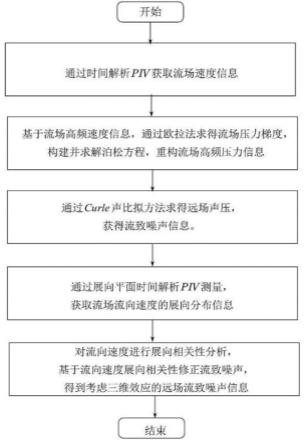
8.为实现上述目的,本发明采用以下技术方案:本发明提供了一种基于平面piv的预测指定声源远场流致噪声的方法,其包括如下步骤:1)通过平面时间解析piv测得流场中的高频速度信息;2)基于流场高频速度信息,通过欧拉法求得流场压力梯度,构建并求解泊松方程,重构流场高频压力信息;3)通过curle声比拟方法求得远场声压,获得远场流致噪声信息;4)通过展向平面时间解析piv测量,获得流场流向速度的展向分布信息;5)对流向速度进行展向相关性分析,基于流向速度展向相关性修正流致噪声,得到考虑三维效应的远场流致噪声信息。
9.作为本发明的优选方案,所述的步骤1)具体为:利用同步器将高频双腔激光器和cmos高速相机同步以采集和储存流场粒子图像,采集到的粒子图像通过piv分析处理得到流场的高频速度信息。
10.作为本发明的优选方案,所述的步骤2)具体为:通过欧拉法求得流场压力梯度,对压力梯度取散度得到拉普拉斯算子构建泊松方程;给定方程的边界条件,通过迭代法求解各个时刻速度场对应的泊松方程,得到时间解析压力信息,重构流场高频压力信息。
11.作为本发明的优选方案,步骤3)所述的通过curle声比拟方法求得远场声压为:基于时间解析piv所测得的高频速度信息与重构的高频压力信息计算curle声比拟模型中的声源项,得到远场声压;计算各个时刻速度场对应的声压,求得时序声压信息,进一步求得流致噪声在频域下的声压级。
12.与现有技术相比,本发明所具有的有益效果包括:1.本发明通过对指定声源流场进行piv测量、并基于piv测量速度信息进行压力场重构、声比拟预测与展向相关性修正等技术,克服了传统流致噪声测量引入其他噪声的缺陷,获得了指定流场不含环境噪声的远场噪声信息;2.本发明通过进行流向与展向两次平面时间解析piv、结合展向相关性修正技术,克服了传统多物理场采集需要考虑各设备干扰、成本高的缺陷,仅仅通过平面piv测量便预测了考虑三维效应的远场流致噪声,并同时获得了流场的高频压力信息,同步获得了流场的速度、压力与噪声信息,为后续流场多物理量耦合分析提供了数据支持;3. 本发明通过对指定声源流场进行piv测量、压力场重构、声比拟预测与展向相关性修正等技术,直接将流场信息与远场流致噪声耦合,可为后续流致噪声抑制技术提供理论指导。
附图说明
13.图1为本发明实施例提供的基于平面时间解析piv预测流致噪声的流程示意图。
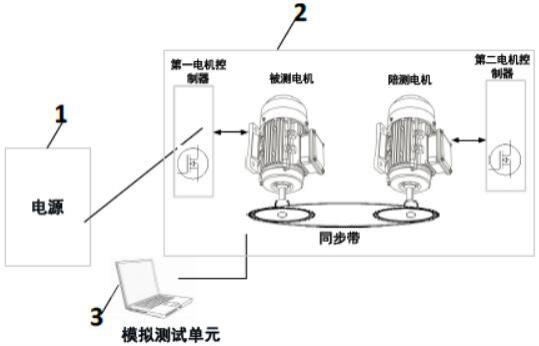
14.图2为本发明实施例提供的平面piv实验总体布置图。
15.图3为本发明实施例提供的piv测试区域及指定声源示意图。
16.图4为本发明实施例提供的瞬时压力云图。
17.图5为本发明实施例提供的基于流向速度的展向相关系数分布图。
18.图6为本发明实施例提供的基于流向速度的展向相关长度图。
19.图7为本发明实施例提供的未修正的声压级,基于流向速度展向相关性修正后的声压级,水听器测量声压级对比图。
20.其中,2-1、高频双腔激光器,2-2、piv光学镜组,2-3、流场测量视窗,2-4、反光镜,2-5、cmos高速相机,2-6、数据采集分析系统,2-7、同步器。
具体实施方式
21.下面通过具体实施例对本发明的方法技术做进一步说明,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限制作用:如图1所示,本实施例提供了一种基于平面时间解析piv预测流致噪声的方法,包括以下步骤:(1)通过平面时间解析piv获取流场速度信息。
22.根据实验待测流场工况搭建相应的实验平台,其总体布置如图2所示,包括高频双腔激光器2-1、 piv光学镜组2-2、流场测量视窗2-3、反光镜2-4、 cmos高速相机2-5、数据采集分析系统2-6、同步器2-7。其中高频双腔激光器2-1发射出高频激光通过piv光学镜组2-2的光路调整后,形成片光源照亮流场测量视窗2-3;待数据采集分析系统2-6向同步器2-7发出采集指令后,同步器2-7向高频双腔激光器2-1与cmos高速相机2-5同步发出触发信号,在高频双腔激光器2-1的激光照亮下,cmos高速相机2-5以设定采集频率同步采集测量视窗的粒子图像;最后粒子图像通过数据采集分析系统2-6上的piv分析软件处理,得到流场的高频速度信息。
23.注意到,由于流场中的固体模型(在本实施例中的固体模型为双圆柱,流场为水中的双圆柱绕流,此类固体模型也可以是翼型等)对激光有遮挡作用,背光区域无法照亮粒子,导致速度信息的缺失从而无法重构压力而影响到后续的声场预测;因此需要反光镜2-4对背光区域补光,从而通过piv捕捉该区域的速度信息。
24.本实施例中研究的流场为水中的双圆柱绕流。由于双圆柱绕流主要声源为下游圆柱头部,优选地,piv测试区域以下游圆柱为中心,视窗边缘到达上游圆柱圆心,如图3所示。
25.通过同步器2-7将高频双腔激光器2-1和cmos高速相机2-5同步,以采集和储存粒子图像,采集到的粒子图像通过piv分析软件处理得到流场的高频速度信息。
26.(2)基于流场高频速度信息,通过欧拉法求得压力梯度,求解泊松方程后获得流场的高频压力信息,完成压力场重构;压力梯度由不可压n-s方程导出:。
27.式中,为压力梯度,为流体密度,为速度矢量,为流体动力粘度,为哈密顿算子。
28.对压力梯度取散度得到拉普拉斯算子构建泊松方程,考虑到实施例流场可看作二维不可压流场,满足无散条件,泊松方程如下式所示:
;式中p为流场压力,为流体密度,u为流向速度,v为法向速度;给定方程的边界条件,本实施例泊松方程求解边界条件分为两种:本实施例的第一类边界条件为:如图3所示,在平行于来流的上下测量区域边界处湍流度小于1%,可看作无旋流动,按照下式给定压力值;其中为当前边界节点的压力,为当前边界节点的平均速度,为当前边界节点的速度脉动,为来流压强由皮托管测出,为来流速度由水洞设备给出。
29.本实施例的第二类边界条件为:如图3所示,在垂直于来流的左右测量区域边界以及圆柱表面给定已由欧拉法求得的压力梯度;结合给出的边界条件,通过迭代法求解各个时刻速度场对应的泊松方程,得到时间解析压力信息。
30.这里,求解给定边界条件的泊松方程,可参照现有技术中已有方法,在此不再赘述。
31.流场的瞬时压力分布云图如图4所示,可以看出涡与低压区一一对应,压力场的求解结果符合理论。
32.(3)利用重构出的时间解析压力信息与piv测量的时间解析速度信息通过curle声比拟方法,计算得到远场流致噪声。
33.本实施例为不可压,不可穿透固壁面流场,远场声压的计算公式为:其中等号右边第一项和第二项分别为偶极子和四级子,在本实施例中分别代表圆柱表面压力脉动与流场中湍流结构引起的噪声。
34.其中,为时序声压信号,、表示以流场声源为坐标原点,观测者为终点位移的分量;y为以流场声源中心为坐标原点,各个声源点的坐标;表示观察者与声源的距离;为声速;t为时间,为声信号的产生时间,为当前声信号的接收时间;,、分别为来流压强、密度,p、为当地流体的压强,密度,为克罗内克符号;、为速度分量;为固壁面法向量;s为面积, 为固壁面表面积;v为体积,表示全流场体积;
为lighthill张量。
35.计算各个时刻速度场对应的声压,求得时序声压信息。
36.通过下式求得流致噪声在频域下的声压级:;其中spl为声压级,为时序声压信号的自功率谱密度,为分析频率,为参考压力,本实施例流体介质为水,取。
37.(4)进行展向平面时间解析piv测量获取流场展向区域的高频速度分布信息,展向piv测量设备与图2中相同,仅仅是调整光路与cmos相机,将测量视窗改为上下游圆柱之间区域的展向平面。
38.(5)获得流场的展向速度信息后,应选取主导声源附近位置的速度展向分布信息进行展向相关性分析,基于流向速度展向相关性修正流致噪声,得到考虑三维效应的远场流致噪声信息。
39.优选地,由于本实施例下游圆柱头部对噪声贡献大,且流向速度能反映流场结构对下游圆柱头部的撞击作用,取下游圆柱圆心前0.75d位置处的流向速度展向分布来计算展向相关长度。
40.确定位置后,按时序提取出该位置的流向速度展向速度分布时序信息,按下式计算展向相关系数:其中,为展向相关性系数,为展向位置,为参考展向位置 ,为相应展向位置的流向速度的功率谱密度函数,为分析频率。
41.图5为基于流向速度的展向相关系数分布图,从图5可以看出在参考展向位置附近与212.5hz,展向相关系数较大。
42.可选地,设定相应展向相关系数阈值=0.3,从参考展向位置向两侧取到=0.3的展向位置、,展向相关长度为两者间距:。
43.本实施例的展向相关长度如图6所示,可以看出在212.5hz处,展向相关长度有个极大值,这也对应着上游圆柱涡脱落的一阶谐频。
44.考虑基于流向速度的展向分布进行展向相关性修正,修正后的声压级为:;其中为修正后的声压级,l为模型展向长度。
45.在本实施例中,所选取观测者的位置离声源的距离为0.15m,在该处布置tc4013-1
水听器,采样率为10khz,采样时长60s,所采集的噪声用于与piv预测噪声对比。
46.将基于piv预测的噪声声压级、基于piv预测并进行展向相关性修正的噪声声压级、水听器采集的噪声声压级和水听器采集的背景噪声声压级进行比较,其结果如图7所示。
47.由图中结果可知,在100-300hz的频段内,水听器采集的双圆柱的特征频率及其一阶谐频特征明显,与piv预测噪声基本一致。但是在300hz以上的频段,水听器采集噪声与piv预测噪声误差较大,这是由于本实施例使用的水洞并非消音水洞,采集信号在该频段信噪比低。也说明了传统噪声测量容易引入其他噪声的缺点。
48.可以从图7看出,无论是水听器采集的噪声信号,还是基于piv预测的噪声信号,双圆柱绕流噪声都存在一个112.5hz的单音噪声;该单音噪声频率与上游圆柱脱落的涡撞击下游圆柱的频率对应,说明双圆柱绕流噪声主要由上游圆柱脱落的涡撞击下游圆柱引起。所获得的流场信息与声场信息之间的对应关系,为后续降噪措施提供理论指导。
49.由此,本实施例基于简单的平面piv测量,完成了考虑流场三维效应的特定声源——双圆柱绕流的流致噪声预测,将双圆柱流场信息与流致噪声信息耦合。同时,也附带求解出了流场的时间解析压力信息,能进一步地对该流动进行动力学分析。
50.以上所述,仅为本发明较佳实施例而已,并非用于限定本发明的保护范围,发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。