技术特征:
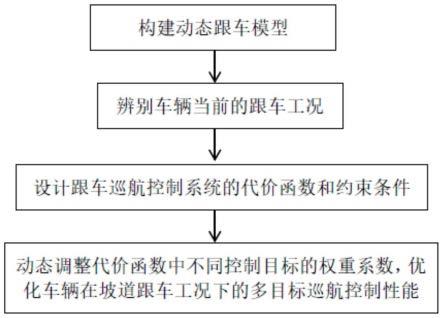
1.一种考虑坡道路况的变权重系数跟车巡航控制方法,其特征在于:构建动态跟车模型;根据主车和前车的道路坡度信息,辨别车辆当前的跟车工况;根据所述动态跟车模型,综合考虑车辆的燃油经济性、跟车安全性和乘坐舒适性,设计跟车巡航控制系统的代价函数和约束条件;由车辆当前的跟车工况,动态调整所述代价函数中不同控制目标的权重系数,优化车辆在坡道跟车工况下的多目标巡航控制性能;所述代价函数为:其中,p为跟车巡航控制系统的预测时域,c为跟车巡航控制系统的控制时域,y
p
(t i|t)为跟车巡航控制系统在t时刻预测出第i步的输出值,y
r
(t i|t)为跟车巡航控制系统在t时刻第i步的期望达到的输出值,q为跟车巡航控制系统输出的正定权重系数矩阵,u(t i)为跟车巡航控制系统在t时刻预测的第i步的预测控制量,r为跟车巡航控制系统控制量的正定权重系数矩阵,ε为各参数松弛因子矩阵,ρ为惩罚系数矩阵,ω1、ω2和ω3分别为跟车安全性权重系数、燃油经济性权重系数和乘坐舒适性权重系数,ω
△
d
为车间距离权重系数,ω
△
v
为车辆相对速度权重系数,ω
u
为主车的期望纵向加速度权重系数,ω
△
u
为主车的期望纵向加速度增量权重系数,为主车的实际纵向加速度的惩罚系数,为主车的实际纵向加速度变化率的惩罚系数,ρ
u
为主车的期望纵向加速度的惩罚系数,ρ
△
v
为主车与前车的纵向相对车速误差的惩罚系数,ρ
△
d
为车辆纵向跟踪误差的惩罚系数。2.根据权利要求1所述的变权重系数跟车巡航控制方法,其特征在于,跟车安全性的约束条件为:其中,d
safe
表示最小的安全车距,ttc为允许的最小碰撞时间,d
smin
为d
safe
的下边界,δv为主车与前车的纵向相对车速误差。3.根据权利要求2所述的变权重系数跟车巡航控制方法,其特征在于,车辆纵向跟踪误差δd、主车与前车的纵向相对车速误差δv的约束条件为:其中,δd
max
、δd
min
、δv
max
、δv
min
分别为δd与δv的上、下边界,ε
△
d
为车辆纵向跟踪误差的松弛因子,ε
△
v
为主车与前车的纵向相对车速误差的松弛因子,η
△
vmax
和η
△
dmax
为对应松弛因子系数的上界,η
△
dmin
和η
△
vmin
为对应松弛因子系数的下边界。4.根据权利要求1所述的变权重系数跟车巡航控制方法,其特征在于,燃油经济性、跟
车安全性的约束条件为:其中,a
hmin
、a
hmax
对应主车加速度的最小值与最大值,对应主车加速度变化率的最小值与最大值,u
min
、u
max
对应主车期望加速度的最小值与最大值,为主车的实际纵向加速度的松弛因子,为主车的实际纵向加速度变化率的松弛因子,ε
u
为主车的期望纵向加速度的松弛因子,和η
umax
为对应松弛因子的上边界,和η
umin
为对应松弛因子的下边界。5.根据权利要求1所述的变权重系数跟车巡航控制方法,其特征在于,所述跟车工况包括准备上坡工况、上坡工况、直行工况、准备下坡工况和下坡工况;准备上坡工况下,且直行工况下,且准备下坡工况下,且上坡工况下,下坡工况下其中:i0为设定的工况切换道路坡度阈值,为主车所处道路坡度,为前车所处道路坡度。6.根据权利要求5所述的变权重系数跟车巡航控制方法,其特征在于,不同跟车工况下,ω1、ω2和ω3的变化规则为:上坡工况、直行工况和下坡工况下,ω1、ω2和ω3均恒定不变;准备上坡工况下,ω1减小、ω2增大、ω3增大;准备上坡工况下,ω1增大、ω2减小、ω3增大。7.根据权利要求3所述的变权重系数跟车巡航控制方法,其特征在于,根据车辆纵向跟踪误差δd、主车与前车的纵向相对车速误差δv,确定跟车过程中三种车辆运动状态,并确定ω
△
d
、ω
△
v
、ω
u
和ω
△
u
的变化规则如下:δd(t)<0、δv(t)<0时,ω
δd
增大,ω
△
v
增大,ω
u
减小,ω
△
u
恒定不变;δd(t)>0、δv(t)<0时,ω
δd
减小,ω
△
v
增大,ω
u
增大,ω
△
u
恒定不变;δd(t)<0、δv(t)>0时,ω
δd
增大,ω
△
v
减小,ω
u
增大,ω
△
u
恒定不变。8.根据权利要求7所述的变权重系数跟车巡航控制方法,其特征在于,ω
△
d
、ω
△
v
、ω
u
和ω
△
u
利用前一个采样时间步长的车辆纵向跟踪误差δd(t-1)和相对车速误差δv(t-1)进行计算:行计算:行计算:ω
△
u
(t)=ω
△
u
(0)
其中,ω
δd
(0)是车间距离权重系数的初始权重,ω
δv
(0)是车辆相对车速权重系数的初始权重,ω
u
(0)是主车的期望纵向加速度权重系数的初始权重,ω
δu
(0)是主车的期望纵向加速度增量权重系数的初始权重,函数f()满足函数g()满足g(t-1)={1-f[δd(t-1)]}ω
δd
(0) {1-f[δv(t-1)]}ω
δv
(0) {1-f[δd(t-1)]f[δv(t-1)]}ω
u
(0)。9.根据权利要求1述的变权重系数跟车巡航控制方法,其特征在于,所述动态跟车模型中的主车与前车的实际间距d=δd d
des
,δd为车辆纵向跟踪误差,d
des
为理车间距,且d
des
=t
h
v
h
d0,d0为最小安全间距,可变车头时距t
h
=t
1-ω
δv
δv,t1为固定车头时距,δv为主车与前车的纵向相对车速误差。10.根据权利要求9的变权重系数跟车巡航控制方法,其特征在于,所述动态跟车模型为其中的状态量x(t)=[δd δv v
h a
h
]
t
,控制量u(t)=[a
des
δa
des
]
t
,系统扰动ω(t)=a
p
,输出量y(t)=[δd δv a
h
]
t
,a、b、c1、c为系数矩阵,v
h
为主的实际纵向车速,a
h
为主车的实际纵向加速度,a
des
为期望的纵向加速度,δa
des
为主车的期望纵向加速度增量,a
p
为前车的实际纵向加速度。
技术总结
本发明公开了一种考虑坡道路况的变权重系数跟车巡航控制方法,属于车辆控制技术领域。本发明跟车巡航控制方法采用可变时距理想间距,提高了车辆对复杂坡道路况和前车速度变化的适应性;本发明方法在确定变权重系数跟车巡航控制系统的代价函数和约束条件时,添加松弛因子,提高跟车巡航控制系控制量的求解范围;本发明还设计考虑坡道路况的跟车工况辨别方法,以加权的形式对跟车巡航控制策略的多个优化目标进行整合,并建立一种权重系数动态调整规则来协调车辆燃油经济性、跟车安全性和乘坐舒适性之间的关系,优化车辆在坡道跟车工况下的多目标巡航控制性能。下的多目标巡航控制性能。下的多目标巡航控制性能。
技术研发人员:汤传业 葛新元 陈建锋 吴强 叶贻财 周卫琪
受保护的技术使用者:江苏大学
技术研发日:2022.11.11
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。