1.本发明涉及卫星测控技术领域,涉及一种空间目标的关联方法、装置和存储介质,特别是一种适用于gpu加速的空间目标关联方法、装置和存储介质。
背景技术:
2.欧洲空间局(european space agency,简称esa)估计尺寸大于1cm的空间目标总数超过了75万,其中绝大部分空间目标是无任何功用的空间碎片。空间碎片广泛分布在地球的高中低轨道,其中位于低轨道(low earth orbit,简称leo)的空间碎片数量占到了总数的67.5%。这些空间目标中的极少数已被编目,即使全球最大的空间目标编目库—北美防空司令部(north american aerospace defense command,简称norad)维护的编目库,当前也仅包含约2万个编目空间目标,而且其中的绝大部分空间目标的尺寸大于10cm。
3.未编目的空间碎片可造成航天器不同程度的损伤甚至功能失效,实际上1 cm 大小的碎片就有可能对正常工作的卫星造成毁灭性的撞击。大量空间碎片也影响了运行中的人造卫星或者航天器的正常工作,以国际空间站(international space station,简称iss)为例,为规避空间碎片的碰撞威胁,iss 已进行了25次轨道机动(即宇航器有目的地按设计主动改变原有轨道的机动飞行)。人类航天活动面临的持续增长的威胁,使得空间态势感知(space situational awareness,简称ssa)受到了越来越多的关注,空间态势感知可概略定义为对空间环境和空间活动信息感知的能力。构建和维护更大规模的空间目标编目库,是空间态势感知领域的一个重要发展方向。
4.相关方案中,对空间目标进行编目时,一般是先对各弧段进行初轨参数的确定,匹配编目库中的空间目标或其他初轨数据,由于数据量大,空间目标多,此类计算会相当耗时,造成空间目标更新不及时,并且由于初轨误差较大,且存在初轨参数计算失败的可能性,再出现问题的情况下,需要人工介入,导致效率较低。
5.因此,亟需开发一种空间目标的关联方法、装置和存储介质,以解决在对空间目标编目时,通过对各弧段进行初轨参数的确定后,再匹配编目库中的空间目标或其他初轨数据,由于数据量大且出现问题时还需要人工介入,导致空间目标编目效率较低的问题,能够免除对初轨参数的确定和外推关联的计算工作,从而能够提升空间目标编目的效率。
技术实现要素:
6.本发明的目的是提供一种空间目标的关联方法、装置和存储介质,解决在对空间目标编目时,通过对各弧段进行初轨参数的确定后,再匹配编目库中的空间目标或其他初轨数据,由于数据量大且出现问题时还需要人工介入,导致空间目标编目效率较低的问题,能够免除对初轨参数的确定和外推关联的计算工作,从而能够提升空间目标编目的效率。
7.为解决上述技术问题,作为本发明的一个方面,提供了一种空间目标的关联方法,包括如下步骤:获取空间目标编目库,并获取观测站观测到的弧段数据;
在gpu完成初始化的情况下,开辟所述gpu的线程;所述gpu的线程的数量为一个以上,且所述gpu的线程的数量大于或等于所述空间目标编目库中已编目的空间目标的个数;在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据;在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据。
8.根据本发明一示例实施方式,所述观测站观测到的弧段数据,包括:一个以上弧段数据;每个弧段数据,包括:时间序列、赤经序列和赤纬序列。
9.根据本发明一示例实施方式,开辟所述gpu的线程,包括:将所述观测站观测到的弧段数据中的时间序列,以及所述空间目标编目库中空间目标的tle数据,均存储至所述gpu的内存中,以便所述gpu能够直接调用、且保证cpu无法调用;开辟所述gpu的线程数量,以使所述gpu的线程数量大于或等于所述空间目标编目库中已编目的空间目标的个数。
10.根据本发明一示例实施方式,其中,在所述gpu的内存中,将已编目的空间目标的存储信息定义为共享内容;将所述观测站观测到的弧段数据中与所述时间序列无关的其它序列,放置于寄存器内存中。
11.根据本发明一示例实施方式,在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据,包括:在每个线程下,根据对应空间目标的tle轨道信息、以及对应弧段数据中的时间序列,进行适用于gpu加速的sgp4轨道预报,计算对应空间目标的位置数据;将卫星在惯性坐标系下该对应空间目标的位置数据,转换为赤经和赤纬。
12.根据本发明一示例实施方式,在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据,包括:在每个线程下,针对该线程下对应的弧段数据的时间序列中的时间信息;提取该线程下对应空间目标在该时间信息下的位置数据;该时间信息下的位置数据,包括:该时间信息下的赤经和赤纬;根据该线程下对应空间目标在该时间信息下的位置数据,计算该时间信息下对应弧段的观测数据;针对所有线程,根据所有时间信息下对应弧段的观测数据,确定所有时间信息下对应弧段的观测数据与已编目的空间目标在球面上的距离,记为球面距离;根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得
到关联成功的弧段数据或关联失败的弧段数据。
13.根据本发明一示例实施方式,根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据,包括:对所有球面距离进行排序,得到最小球面距离;提取所述最小球面距离所对应的已编目的空间目标,基于该已编目的空间目标的轨道高度,将所述最小球面距离转换为空间距离;若该空间距离小于设定的距离阈值,且该空间距离的标准差小于设定的标准差阈值,则认为该已编目的空间目标与对应弧段数据之间关联成功,否则认为关联不成功,从而得到关联成功的弧段数据或关联失败的弧段数据。
14.根据本发明一示例实施方式,还包括:将关联成功的弧段数据,按所有已编目的空间目标中的对应空间目标进行分组;将关联不成功的弧段数据,暂定为新的空间目标,若后续仍确定为关联不成功的弧段数据,则确定该关联不成功的弧段数据为新的空间目标。
15.作为本发明的第二个方面,本发明提供一种空间目标的关联装置,包括:获取单元,被配置为获取空间目标编目库,并获取观测站观测到的弧段数据;控制单元,被配置为在gpu完成初始化的情况下,开辟所述gpu的线程;所述gpu的线程的数量为一个以上,且所述gpu的线程的数量大于或等于所述空间目标编目库中已编目的空间目标的个数;所述控制单元,还被配置为在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据;所述控制单元,还被配置为在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据。
16.作为本发明的第三个方面,本发明提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行一是所述的空间目标的关联方法。
17.本发明的有益效果是:本发明的方法通过利用空间目标编目库中的tle根数信息,直接对各观测弧段的数据进行关联,从而解决在对空间目标编目时,通过对各弧段进行初轨参数的确定后,再匹配编目库中的空间目标或其他初轨数据,由于数据量大且出现问题时还需要人工介入,导致空间目标编目效率较低的问题,能够免除对初轨参数的确定和外推关联的计算工作,从而能够提升空间目标编目的效率。
附图说明
18.图1示意性示出了空间目标的关联方法的步骤图;图2示意性示出了空间目标的关联方法中开辟所述gpu的线程的步骤图;
图3示意性示出了空间目标的关联方法中对该空间目标进行预报计算的步骤图;图4示意性示出了空间目标的关联方法中对该线程下的弧段数据与已编目的空间目标进行关联的步骤图;图5示意性示出了空间目标的关联方法中根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联的步骤图;图6示意性示出了空间目标的关联装置的组成图;图7示意性示出了gpu加速计算硬件的组成图;图8示意性示出了适用于gpu加速的空间目标关联流程的步骤图。
19.其中,102—获取单元,104—控制单元。
具体实施方式
20.以下对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
21.为了构建和维护更大规模的空间目标编目库,获取空间目标的监测数据是进行空间目标编目的基础。光学观测成本低、易于实现,应用较广泛。光学观测仅可获得空间目标的赤经和赤纬,或获得空间目标的高度角和方位角等角度数据,无距离信息。空间目标的赤经和赤纬、以及空间目标的高度角和方位角这两种角度数据,是在不同的坐标系下获取的,是后续用于确定空间目标位置的初始观测数据,简单理解,就是以光学观测仪器为中心,构建一个球坐标系,用两个角度,来表示空间目标在仪器的哪一个方向上;然后观测仪器会观测一段时间,就是类似相机,隔一段时间,拍一张照片,就会有一段观测的赤经和赤纬,或者高度角和方位角。
22.由于leo空间目标运动速度非常快,天基或者地基光学观测leo空间目标得到的观测弧段往往较短。就天基光学监测leo空间目标而言,作为监测平台的卫星一般也处于leo轨道,因此二者之间的相对运行速度较快,得到的角度数据弧长往往较短。模拟试验表明,大部分的观测弧段在20s以内,这种弧长非常短的弧段一般称之为甚短弧。
23.针对甚短弧角度数据,相关方案中利用初轨算法解算得到的初轨参数误差较大不能直接编目,亦即初轨参数(或对应的角度观测数据)可能无法被进一步利用。为利用此类初轨参数(或对应的角度观测值),需要将其与其他初轨参数进行关联处理,由此产生了初轨参数的关联问题。初轨参数关联的目的,是判断两组独立的初轨参数是否属于同一目标。这里,判断两组独立的初轨参数是否属于同一目标,具体可以是:初轨使用6个参数表示的,就是轨道六元素,主要是通过半长轴、升交点赤经、倾角者三个参数(如半长轴表示高度、升交点赤经和倾角表示轨道面、轨道面就是卫星绕着地球转的面),判断两个初轨参数中这三个参数的差异是不是小于给定的阈值,就能初步判断两个初轨参数不是同一个目标;如果认为属于同一目标,则可通过处理两组初轨参数的角度数据获得较高精度的轨道参数。随着空间碎片数目的不断增加,对空间碎片编目的需求更加迫切,这使得甚短弧初轨数据(即初轨参数)的关联问题越来越重要。
24.其中,甚短弧就是指观测数据很少,因为光学观测空间目标的视场比较小,观测时间长度比较短,对于确定初轨参数来说,误差太大,所以需要将同一个目标在不同时间、不同仪器上的观测数据关联在一起,构建一个比较多的数据,来确定出精确的轨道。
25.相关方案中,空间目标光学观测是空间目标关联与编目的主要手段,其利用光学摄影技术,直接或间接利用恒星位置来去确定光学望远镜电荷耦合器件(charge coupled device,简称ccd)影像上目标的角度(或方向)观测值。空间碎片本身不具发光性质,但由于其能反射太阳光,且能被地面光学观测系统传感器接收,成为空间碎片探测的有效手段之一。但由于可视角相对较小,对于低轨卫星而言,只有20s左右的观测,对于高轨卫星,单次观测可以在1~2min。
26.相关方案中,是基于甚短弧段定轨方法进行数据关联,其流程可以分为以下几个步骤:步骤11、根据光学设备的所在位置,计算可能被观测到的空间目标集合。
27.步骤12、利用观测得到的甚短弧观测数据,计算得到初轨参数,对比空间目标集合的轨道根数,计算升交点赤经和倾角差异,将差异小于给定阈值的空间目标提取出来,构建集合。
28.步骤13、将集合中的空间目标预测到观测时刻,再根据观测数据中的初轨参数计算待关联的空间目标的位置,但计算误差较大,进而计算集合中的空间目标位置与待关联的空间目标位置进行比对,确定最接近的空间目标,并分析残差量是否小于阈值,若小于给定阈值,且小于阈值的仅有一个空间目标,则说明关联成功,若大于阈值或小于阈值的空间目标大于两个,则关联失败,判断为新的空间目标。
29.这样,通过与空间目标编目库中的根数进行比较或者与其他观测数据的初轨根数进行比较,进行初步的关联处理,然后分析初轨参数与目标库或其他观测数据中的初轨参数的轨道在沿轨、法向和径向方向的差异,当差异小于给定阈值时认为为同一空间目标,并将多个观测数据合并,获得更准确的轨道数据,再与编目库中的空间目标进行比对,最终完成空间目标编目库的更新。
30.考虑到,目标已编目的空间目标以达到2万余个,美国的空间监视网是目前世界上最大的空间态势感知网,包含地基系统和天基系统两部分,每天进行数十万次空间探测,会产生海量的观测数据。而相关方案中,一般是先对各弧段进行初轨参数的确定,匹配编目库中的空间目标或其他初轨数据,由于数据量大,空间目标多,此类计算会相当耗时,造成空间目标更新不及时,并且由于初轨误差较大,且存在初轨参数计算失败的可能性,再出现问题的情况下,需要人工介入,导致效率较低。所以,本发明的方案提出一种空间目标的关联方法、装置和存储介质,更具体是一种适用于gpu加速的空间目标关联方法,以解决在对空间目标编目时,通过对各弧段进行初轨参数的确定后,再匹配编目库中的空间目标或其他初轨数据,由于数据量大且出现问题时还需要人工介入,导致空间目标编目效率较低的问题,能够免除对初轨参数的确定和外推关联的计算工作,从而能够提升空间目标编目的效率。
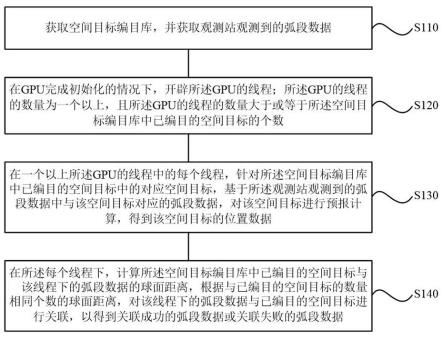
31.作为本发明的第一个实施方式,提供一种空间目标的关联方法,如图1所示,包括如下步骤:步骤s110至步骤s140。
32.在步骤s110处,获取空间目标编目库,并获取观测站观测到的弧段数据(如提取到的观测站的弧段数据)。
33.在一些实施方式中,步骤s110中所述观测站观测到的弧段数据,包括:一个以上弧
段数据。每个弧段数据,包括:时间序列、赤经序列和赤纬序列。
34.本发明的方案,提出一种适用于gpu加速的空间目标关联方法,更具体是一种基于gpu加速的甚短弧匹配方法,适用于gpu加速的无需初轨参数的目标关联。图8示意性示出了适用于gpu加速的空间目标关联流程的步骤图。如图8所示,适用于gpu加速的空间目标关联流程,包括:步骤21、获取空间目标编目库,并提取观测站的弧段数据。
35.观测站的弧段数据,包括:一个以上弧段数据。每个弧段数据,包含:时间序列(如各个观测数据的时刻)、赤经序列和赤纬序列。其中,为第条观测弧段,取值范围为1~,为正整数。为数据序号,取值范围为1~,为正整数。
36.其中,时间序列(如各个观测数据的时刻)、赤经序列和赤纬序列中各序列的序列长度,可以根据观测设备对每个弧段的观测时长和观测频率确定。这里,每个弧段都有一定的观测时长,该观测时长主要是由空间目标的高度决定和观测仪器的观测范围决定的。而观测频率,主要指观测设备的观测频率设备。
37.在步骤s120处,在gpu完成初始化的情况下,开辟所述gpu的线程。所述gpu的线程的数量为一个以上,且所述gpu的线程的数量大于或等于所述空间目标编目库中已编目的空间目标的个数。
38.在一些实施方式中,步骤s120中开辟所述gpu的线程的具体过程,参见以下示例性说明。
39.下面结合图2所示本发明的方法中开辟所述gpu的线程的一实施例流程示意图,进一步说明步骤s120中开辟所述gpu的线程的具体过程,包括:步骤s210至步骤s220。
40.s210,将所述观测站观测到的弧段数据中的时间序列,以及所述空间目标编目库中空间目标的tle数据,均存储至所述gpu的内存中,以便所述gpu能够直接调用、且保证cpu无法调用。
41.在一些实施方式中,在步骤s210中,在所述gpu的内存中,将已编目的空间目标的存储信息定义为共享内容。将所述观测站观测到的弧段数据中与所述时间序列无关的其它序列,放置于寄存器内存中。
42.s220,开辟所述gpu的线程数量,以使所述gpu的线程数量大于或等于所述空间目标编目库中已编目的空间目标的个数。
43.具体地,本发明的方案中,采用基于gpu的加速计算。图7示意性示出了gpu加速计算硬件的组成图。如图7所示,gpu加速计算硬件,包括:gpu和cpu。在cpu侧,包括:控制器、alu(即算术逻辑运算单元)、缓存cache(即高速缓冲存储器)、以及内存。在gpu侧,包括:cuda(即通用并行计算架构,compute unified device architecture)和显存。
44.其中,gpu与cpu之间利用pci总线连接。虽然cpu的运算核心较少,但是其可以实现复杂的逻辑运算,因此其适合控制密集型任务。另外,cpu上的线程是重量级的,上下文切换开销大,然而gpu由于存在很多核心,其线程是轻量级的。
45.gpu的内存组成也存在一定的特殊性,可大致分为以下几种内存类型,具体可以参见表1所示的gpu内存分类表。
46.表1:gpu内存分类其中,寄存器内存和共享内存处于芯片内,访问速度极快,但容量较小,而其他内存与gpu显存大小相关,访问速度较慢,在gpu编程中,应尽可能充分利用寄存器内存和共享内存,减少数据访问耗时,加快并行效率。
47.结合图8所示的例子,将弧段数据的时间序列数据和空间目标tle数据拷贝至gpu内存中(gpu仅能调用gpu内存数据,cpu内存无法调用,所以先将数据拷贝至gpu内存),开辟gpu线程数量,由于硬件的限制,要求线程总数为32的整倍数,此处可开辟个线程,ceil为向上取整,保证开辟的线程数量大于或等于空间目标个数。
48.例如:所述gpu的线程,包括:第一线程至第l线程,l为正整数、且与所述空间目标编目库中已编目的空间目标的个数相同。进而,所述第一线程至所述第l线程并行计算,其中,所述第一线程至所述第l线程中的每个线程,针对所述空间目标编目库中已编目的l个空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据。这样,通过所述第一线程至所述第l线程,实现对所述l个空间目标的并行预报计算,得到所述l个空间目标的位置数据。
49.在一些实施方式中,在步骤s220中,结合图8所示的例子,将卫星预报的任务并行化,具体可以包括:观测数据的时间序列为,观测数据总个数为,已编目的空间目标个数为,要将所有空间目标预报到观测数据时间点,也就是需要进行(即*)次计算,为实现基于gpu的并行计算,此处按空间目标进行剖分,一个线程块负责一个空间目标的计算工作,预报次,总线程数为。由于gpu并行计算有区别于cpu并行计算,需要考虑gpu计算中变量数据获取的时间成本,需要在各个线程中尽量减少与内存之间的数据交换,避免使用gpu的全局内存、常量内存等。所以,在本发明的方案中,将编目的空间目标信息定义为共享内存(预报计算中需要重复使用编目的空间目标数据,将其定义为共享内存,提高使用效率),将轨道预报中的与时间无关的中间变量放置于寄存器内存中,从而,通过合理的gpu显存分配提高加速效率。
50.在步骤s130处,在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据。这样,通过一个以上所述gpu的线程,实现对所述空间目标编目库中已编目的空间目标的并行预报
计算,得到所述空间目标编目库中已编目的空间目标的位置数据。
51.在一些实施方式中,步骤s130中在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据的具体过程,参见以下示例性说明。
52.下面结合图3所示本发明的方法中对该空间目标进行预报计算的一实施例流程示意图,进一步说明步骤s130中对该空间目标进行预报计算的具体过程,包括:步骤s310至步骤s320。
53.s310,在每个线程下,根据对应空间目标的tle轨道信息、以及对应弧段数据中的时间序列,进行适用于gpu加速的sgp4轨道预报,计算对应空间目标的位置数据。
54.s320,将卫星在惯性坐标系下该对应空间目标的位置数据,转换为赤经和赤纬。
55.具体地,如图8所示,适用于gpu加速的空间目标关联流程,还包括:步骤22、gpu完成初始化,开辟线程(如线程1、线程2、
……
、线程l等)进行预报计算,根据提取到的观测站的弧段数据,进行适用于gpu加速的sgp4轨道预报。具体是:基于每个gpu线程,对对应的一个空间目标预报到观测弧段数据的时刻,将惯性坐标系下的位置转换成赤经和赤纬数据。
56.sgp4轨道预报,是一种解析法轨道预报方法,其输入的参数为tle和预报时刻,可以通过计算以获得该时刻的卫星位置和速度信息(也就是卫星星历)。其中,输入参数中的tle,是空间目标编目库中的轨道信息。输入参数中的预报时刻,是观测站的弧段数据中的时间序列(如各个观测数据的时刻)。观测站的弧段数据中的赤经序列和赤纬序列,是用tle预报出来的赤经赤纬和观测得到的赤经和赤纬进行匹配处理得到的。
57.在步骤22中,由于采用sgp4轨道预报,各个时刻的轨道预报计算相互独立,并且各个卫星之间也是相互独立的,因此,可将卫星预报的任务并行化。这里,本发明的方案,主要为了适应图像处理器(graphics processing unit,简称gpu)运算,不用观测数据构建初轨参数。因为,相关方案中,在对空间目标的编目过程中,用观测数据构建初轨参数时,一方面会导致误差比较大,另一方面关联过程中有一些计算内容无法并行。而本发明的方案,采样适用于gpu加速的sgp4轨道预报,从而,可以采用一种完全可并行的手段实现空调目标的关联,可以提高空间目标编目的效率。
58.具体地,步骤22中的并行流程可以表述为:每个线程负责一个空间目标的计算工作,根据弧段数据的时间序列,计算观测时间内空间目标的位置,并转换成赤经和赤纬。
59.完成sgp4轨道预报工作后,需要将卫星在惯性坐标系下的位置信息转换为赤经和赤纬:赤纬:。
60.其中,为卫星在惯性坐标系下的位置,为观测站在惯性坐标系下的位置,为赤经,为赤纬。
61.在步骤s140处,在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据。
62.在本发明的方案中,一种适用于gpu(graphics processing unit,简称gpu)加速的空间目标关联方法,利用空间目标编目库中的两行根数(two line element,简称tle)轨道信息,计算卫星在给定光学观测仪器下的理论观测值(如空间目标的赤经和赤纬),然后结合实际观测值与理论观测值进行关联匹配,确定弧段所属的空间目标编目库中的空间目标,若发现未匹配的弧段,可判断为新的空间目标,这样,在空间目标光学测量数据的关联过程中,可以提高空间目标编目的效率。
63.在一些实施方式中,步骤s140中在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据的具体过程,参见以下示例性说明。
64.下面结合图4所示本发明的方法中对该线程下的弧段数据与已编目的空间目标进行关联的一实施例流程示意图,进一步说明步骤s140中对该线程下的弧段数据与已编目的空间目标进行关联的具体过程,包括:步骤s410至步骤s440。
65.步骤s410,在每个线程下,针对该线程下对应的弧段数据的时间序列中的时间信息。提取该线程下对应空间目标在该时间信息下的位置数据。该时间信息下的位置数据,包括:该时间信息下的赤经和赤纬。
66.步骤s420,根据该线程下对应空间目标在该时间信息下的位置数据,计算该时间信息下对应弧段的观测数据。
67.步骤s430,针对所有线程,根据所有时间信息下对应弧段的观测数据,确定所有时间信息下对应弧段的观测数据与已编目的空间目标在球面上的距离,记为球面距离。
68.步骤s440,根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据。
69.具体地,如图8所示,适用于gpu加速的空间目标关联流程,还包括:步骤23、适用于gpu加速的空间目标关联方法,不再依赖于利用观测数据弧段的初轨信息(即初轨参数),而是直接从观测数据出发,进行关联,可以将关联问题转换成以地球为球心、半径为单位长度的球面上的序列匹配问题,避免使用观测数据计算初轨导致的误差。具体的关联流程如下:步骤231、在每个线程下,对该线程下对应的弧段数据进行线性拟合,根据弧段数据的时间信息,提取空间目标编目库中编目空间目标在该时间的赤经和赤纬,提取该弧段观测数据,确定弧段数据各时间点的观测数据与编目空间目标的预报数据在球面上的距离即球面距离,将距离分为沿着弧段方向和垂直弧段方向两部分,由于编目空间目标的预报存在一定的误差、且沿速度方向速度大于其他方向的误差,因为对垂直弧段方向
的距离施加一个数值为10的权重,通过权重处理,将距离定义为,计算整个弧段的平均距离和标准差。
70.其中,线性拟合,具体是指:在空间目标在光学相机上的成像结果是一个一个的点,近似为一条直线,将数据点拟合成一条直线,直线的方向就是弧段方向,垂直方向就是垂直弧段方向,方便将距离信息分解。
71.编目空间目标的预报存在一定的误差、且沿速度方向速度大于其他方向的误差,是轨道预报中的问题,一般来说,将轨道预报的结果与实际数据进行误差分析的时候,会将误差分为速度方向、轨道面法向和地心方向,这三个方向构成一个直角坐标系,其中速度方向的误差会远大于其他两个方向的误差,一般会大一个量级,因此在匹配过程中,需要考虑这个不同量级误差的影响,所以将垂直弧段的距离施加一个权重,将量级的影响削弱。
72.在一些实施方式中,步骤s440中根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据的具体过程,参见以下示例性说明。
73.下面结合图5所示本发明的方法中根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联的一实施例流程示意图,进一步说明步骤s440中根据所有球面距离,对该线程下的弧段数据与已编目的空间目标进行关联的具体过程,包括:步骤s510至步骤s530。
74.步骤s510,对所有球面距离进行排序,得到最小球面距离。
75.步骤s520,提取所述最小球面距离所对应的已编目的空间目标,基于该已编目的空间目标的轨道高度,将所述最小球面距离转换为空间距离。
76.步骤s530,若该空间距离小于设定的距离阈值,且该空间距离的标准差小于设定的标准差阈值,则认为该已编目的空间目标与对应弧段数据之间关联成功,否则认为关联不成功,从而得到关联成功的弧段数据或关联失败的弧段数据。
77.具体地,如图8所示,适用于gpu加速的空间目标关联流程,还包括:步骤232、对距离(如球面距离)进行排序,提取最小距离的编目空间目标,并根据编目空间的轨道高度,将计算出来的球面距离近似转换为空间距离数据。
78.当距离小于km,且距离的标准差小于0.5km,可以认为编目空间目标与该弧段数据关联成功,否则认为关联不成功。其中,为观测时刻,为空间目标的轨道信息时刻,单位为天。
79.以上步骤中,可见各个弧段数据的关联流程均是相互独立的,因此可以实现gpu并行,并行流程表述为:将弧段数据和预报得到的空间目标的时间、赤经、赤纬数据拷贝至gpu内存中,由于各弧段数据的关联是相互独立的,因此可以按弧段进行并行处理,每个线程处理一个弧段的关联问题,开辟线程个数为,每个线程按照上述的流程处理即可。
80.在一些实施方式中,本发明的方案所述的空间目标的关联方法,还包括:对关联成功与不成功的弧段数据的后续处理过程,具体如下:
第一方面,针对关联成功的弧段数据的后续处理过程:将关联成功的弧段数据,按所有已编目的空间目标中的对应空间目标进行分组。
81.第二方面,针对关联成功的弧段数据的后续处理过程:将关联不成功的弧段数据,暂定为新的空间目标,若后续仍确定为关联不成功的弧段数据,则确定该关联不成功的弧段数据为新的空间目标。
82.如图8所示,适用于gpu加速的空间目标关联流程,还包括:步骤24、对于关联成功的弧段,按空间目标进行分组处理,用于后续的定轨处理,如将弧段对应到库中的目标,然后拼接定轨即可,对于关联不成功的目标,暂定为新目标,在后续处理中,若持续关联弧段,可最终认定为新的空间目标。
83.本发明的方案提出的一种适用于gpu加速的空间目标关联方法,利用空间目标编目库中的tle根数信息(即tle轨道信息),直接对各观测弧段的数据进行关联,无需进行初轨参数的确定和外推关联计算工作,可以提高空间目标编目的效率。其中,空间目标编目库中的tle根数信息,是长时间观测得到的,对空间目标进行编号,可以认为是直接获取的数据。
84.相关方案中,初轨参数的误差较大,在计算初轨参数的时候,无形中会引入不确定性因素而引入误差,且可能存在初轨计算失败的情况,因此,本发明的方案,利用空间目标编目库中的tle根数信息,直接对各观测弧段的数据进行关联,这样,直接从观测数据出发,无需进行初轨参数的确定和外推关联计算工作,可以避免引入误差。
85.相关方案中,初轨参数中确定一个因素需要做一些筛选,如根据升交点赤经、倾角进行判断,将关联的对象进行一些筛选,可以减少后续的计算量,但却引入了初轨确定造成的误差。而本发明的方案,是直接用gpu进行加速计算,能极大提高速度,并且可以避免引入这个初轨参见计算的问题。
86.根据本发明的第二个实施方式,提供一种空间目标的关联装置,采用第一个实施方式的空间目标的关联方法,如图6所示,包括:获取单元102和控制单元104。
87.其中,获取单元102,被配置为获取空间目标编目库,并获取观测站观测到的弧段数据(如提取到的观测站的弧段数据)。
88.控制单元104,被配置为在gpu完成初始化的情况下,开辟所述gpu的线程。所述gpu的线程的数量为一个以上,且所述gpu的线程的数量大于或等于所述空间目标编目库中已编目的空间目标的个数。
89.所述控制单元104,还被配置为在一个以上所述gpu的线程中的每个线程,针对所述空间目标编目库中已编目的空间目标中的对应空间目标,基于所述观测站观测到的弧段数据中与该空间目标对应的弧段数据,对该空间目标进行预报计算,得到该空间目标的位置数据。这样,通过一个以上所述gpu的线程,实现对所述空间目标编目库中已编目的空间目标的并行预报计算,得到所述空间目标编目库中已编目的空间目标的位置数据。
90.所述控制单元104,还被配置为在所述每个线程下,计算所述空间目标编目库中已编目的空间目标与将该线程下的弧段数据的球面距离,根据与已编目的空间目标的数量相同个数的球面距离,对该线程下的弧段数据与已编目的空间目标进行关联,以得到关联成功的弧段数据或关联失败的弧段数据。
91.在本发明的方案中,一种适用于gpu(graphics processing unit,简称gpu)加速
的空间目标关联装置,利用空间目标编目库中的两行根数(two line element,简称tle)轨道信息,计算卫星在给定光学观测仪器下的理论观测值(如空间目标的赤经和赤纬),然后结合实际观测值与理论观测值进行关联匹配,确定弧段所属的空间目标编目库中的空间目标,若发现未匹配的弧段,可判断为新的空间目标,这样,在空间目标光学测量数据的关联过程中,可以提高空间目标编目的效率。
92.由于本实施例的装置所实现的处理及功能基本相应于前述方法的实施例、原理和实例,故本实施例的描述中未详尽之处,可以参见前述实施例中的相关说明,在此不做赘述。
93.根据本发明的第三个实施方式,还提供了对应于空间目标的关联方法的一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的空间目标的关联方法。
94.由于本实施例的存储介质所实现的处理及功能基本相应于前述方法的实施例、原理和实例,故本实施例的描述中未详尽之处,可以参见前述实施例中的相关说明,在此不做赘述。
95.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。