1.本技术涉及智能检测领域,且更为具体地,涉及一种具有机器视觉的用于增效剂内核的智能涂覆系统及其方法。
背景技术:
2.目前农业生产对化肥的依赖度较高,其中氮肥的总体利用率仅为30%~35%,其它约30%以上由淋失、挥发和地表径流等途径而损失,约30%左右被微生物分解消耗。例如:尿素施入土壤后在土壤中的脲酶作用下很快转化为铵态氮,铵态氮在高ph土壤中转变为氨气挥发。土壤中的某些细菌可使铵态氮发生硝化/反硝化作用转化为硝态氮或亚硝态氮,硝态氮在土壤中极易淋失,而亚硝态氮会以氮的氧化物的形式呈气态损失,造成氮肥的大量损失,降低了肥料氮的利用率,造成资源的巨大浪费,同时也导致了地下水和土壤面源的污染,引起温室气体效应和水体的富营养化。
3.本技术人经研究,如图1a所示,提出了一种缓释增效剂,其包括内核1,涂覆于内核表面的硝化抑制剂2,以及,将涂覆有硝化抑制剂2的内核1包覆在内的缓释囊体3,其中,所述囊体3由特定材料制成以使得涂覆于所述内核1的硝化抑制剂2能够以预定速率从所述内核自所述缓释囊体3以预定速率排出,通过这样的方式,避免硝化抑制剂2在被直接施加于土壤之后因被分解而失去效用。
4.在制备工艺中,期待对硝化抑制剂涂覆于所述内核表面的均匀性进行判断,其原因为当硝化抑制剂均匀地涂覆于内核表面时,其在土壤中能够以各向均匀地向土壤缓释所述硝化抑制剂,以提高土壤增效效果;其次,当涂覆均匀时,硝化抑制剂与所述内核表面的结合强度也能够被有效地确保。
5.因此,期待一种用于增效剂内核的智能涂覆设备,其能够在硝化抑制剂的包覆过程中对硝化抑制剂在内核表面的包覆均匀性进行智能分析与判断以提高最终的成型质量。
技术实现要素:
6.为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种具有机器视觉的用于增效剂内核的智能涂覆系统及其方法,其中,所述智能涂覆系统通过机器视觉来判断硝化抑制剂涂覆于内核表面的涂覆状态,从而对涂覆均匀度进行智能监测与把控,以提高最终缓释增效剂成型质量。
7.根据本技术的一个方面,提供了一种具有机器视觉的用于增效剂内核的智能涂覆系统,其包括:图像采集模块,用于获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;局部视角特征提取模块,用于将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;不同视角比较模块,用于计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;二维结构化模块,用于将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;
图结构数据编码模块,用于将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;特征分布校正模块,用于基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;以及包覆效果判断模块,用于将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
8.在上述具有机器视觉的用于增效剂内核的智能涂覆系统中,所述局部视角特征提取模块,使用所述作为过滤器的第一卷积神经网络的各层在层的正向传递中分别进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的均值池化以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述作为过滤器的第一卷积神经网络的最后一层的输出为所述多个侧面表面状态特征向量,所述作为过滤器的第一卷积神经网络的第一层的输入为所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像。
9.在上述具有机器视觉的用于增效剂内核的智能涂覆系统中,所述不同视角比较模块,进一步用于:以如下公式来计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到多个余弦距离;其中,所述公式为:其中 和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量,和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量的各个位置的特征值,表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离;以及,将所述多个余弦距离进行二维排列为所述余弦距离矩阵。
10.在上述具有机器视觉的用于增效剂内核的智能涂覆系统中,在所述图结构数据编码模块中,所述图神经网络通过可学习的神经网络参数来对所述全局表面状态特征矩阵和所述余弦距离矩阵进行处理以得到包含不同侧面图像之间的相似度特征和各个侧面图像的图像特征的所述拓扑全局表面状态特征矩阵。
11.在上述具有机器视觉的用于增效剂内核的智能涂覆系统中,所述特征分布校正模块,进一步用于:基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,以如下公式对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到所述校正后拓扑全局表面状态特征矩阵;其中,所述公式为:其中表示所述拓扑全局表面状态特征矩阵,表示所述拓扑全局表面状态特征矩阵的最大特征值的倒数,表示所述校正后拓扑全局表面状态特征矩阵,表示按位置点乘。
12.在上述具有机器视觉的用于增效剂内核的智能涂覆系统中,所述包覆效果判断模块,包括:展开单元,用于将所述校正后拓扑全局表面状态特征矩阵沿着行向量或列向量展开为一维的分类特征向量;全连接编码单元,用于将所述分类特征向量输入所述分类器的至少一个全连接层以得到编码分类特征向量;分类单元,用于将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
13.根据本技术的另一方面,提供了一种具有机器视觉的用于增效剂内核的智能涂覆方法,其包括:获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;以及将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
14.根据本技术的再一方面,提供了一种电子设备,包括:处理器;以及,存储器,在所述存储器中存储有计算机程序指令,所述计算机程序指令在被所述处理器运行时使得所述处理器执行如上所述的具有机器视觉的用于增效剂内核的智能涂覆方法。
15.根据本技术的又一方面,提供了一种计算机可读介质,其上存储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行如上所述的具有机器视觉的用于增效剂内核的智能涂覆方法。
16.与现有技术相比,本技术提供的一种具有机器视觉的用于增效剂内核的智能涂覆系统及其方法,其中,所述智能涂覆设备通过机器视觉来判断硝化抑制剂涂覆于内核表面的涂覆状态,从而对涂覆均匀度进行智能监测与把控,以提高最终缓释增效剂成型质量。
附图说明
17.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
18.图1a图示了根据本技术实施例的缓释增效剂的结构示意图。
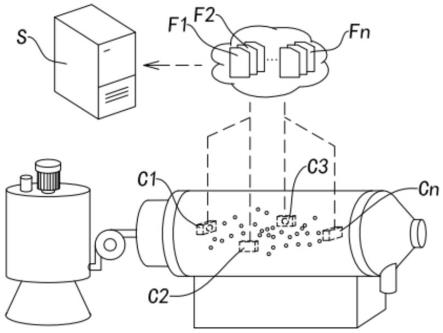
19.图1b示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的场景图。
20.图2图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的框图。
21.图3图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的系统架构图。
22.图4图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统
中第一卷积神经网络特征提取过程的流程图。
23.图5图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统中包覆效果判断模块的框图。
24.图6图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆方法的流程图。
具体实施方式
25.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
26.场景概述:相应地,在对于硝化抑制剂涂覆于内核表面的均匀性进行检测,以保证其在土壤中能够以各向均匀地向所述土壤缓释所述硝化抑制剂来提高所述土壤增效效果时,由于涂覆于所述内核表面的硝化抑制剂在不同的角度上具有不同的均匀性特征信息,并且这些特征信息之间是具有关联性特征分布的。因此,为了提高对于所述硝化抑制剂的涂覆均匀性进行准确地检测判断以提高最终的成型质量,在本技术的技术方案中,选择从多个角度来采集的涂覆有硝化抑制剂的内核的多个侧面图像作为输入数据,并利用深度神经网络模型来作为特征提取器来分别挖掘出所述多个侧面图像的硝化抑制剂涂覆的均匀性隐含特征。这样,再以所述涂覆有硝化抑制剂的内核的多个侧面图像的特征向量作为节点,以每两个所述侧面特征向量之间的余弦距离作为节点与节点之间的关联,进而使用图神经网络模型来得到所述内核的多个侧面的包含各个节点的相似度的全局表面均匀性特征表示,以此来提高分类的精度以及最终的缓释增效剂的成型质量。
27.具体地,在本技术的技术方案中,首先,通过多个摄像头从不同拍摄视角采集涂覆有硝化抑制剂的内核的多个侧面图像。接着,进一步使用在图像的局部隐含特征提取方面具有优异表现的作为过滤器的第一卷积神经网络模型对于所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别进行处理,以分别提取出所述各个侧面图像的局部隐含特征在高维空间中的特征分布表示,从而得到多个侧面表面状态特征向量。进一步地,再将所述多个侧面表面状态特征向量进行二维排列以整合所述内核的各个侧面图像的隐含特征分布信息,从而得到全局表面状态特征矩阵。
28.应可以理解,由于所述内核是立体的,考虑到所述内核的各个表面具有关联性的特征信息,并且当涂覆于所述内核的硝化抑制剂覆盖均匀时,那么所述内核的各个表面的均匀性特征相一致,因此,可以利用所述内核的各个表面的关于硝化抑制剂覆盖的相似度特征信息来辅助进行均匀度判断,进而进一步提高分类的精准度。也就是,进一步计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵。
29.进一步地,以所述涂覆有硝化抑制剂的内核的多个侧面图像的特征向量作为节点,以每两个所述侧面特征向量之间的余弦距离作为节点与节点之间的关联,这样再使用图神经网络模型进行处理来得到所述内核的多个侧面的包含各个节点的相似度的全局表面均匀性特征表示,以此来提高分类的精度以及最终的缓释增效剂的成型质量。也就是,进一步将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络中进行处理,以生
成包含有所述内核的多个侧面图像特征信息与不规则的所述各个图像表面均匀度相似关联特征的拓扑全局表面状态特征矩阵。
30.特别地,在本技术的技术方案中,这里,在将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络得到所述拓扑全局表面状态特征矩阵时,由于所述拓扑全局表面状态特征矩阵的与所述侧面表面状态特征向量相同维度的每个特征向量,例如,假定为行向量之间的相关性较低,因此当所述拓扑全局表面状态特征矩阵作为整体通过分类器进行分类时,由于行向量之间的低相关性导致的行向量之间的相位差可能会对分类器的分类解的类概率聚合造成负面影响。
31.因此,在本技术的技术方案中,优选地对所述拓扑全局表面状态特征矩阵进行的波函数表征聚合,具体为:其中是所述拓扑全局表面状态特征矩阵的最大特征值的倒数。
32.这里,通过引入矩阵的波函数表示,即幅度表示强度信息,而相位表示周期位置信息,可以对特征矩阵的各个位置的特征值的信息表征进行类复函数域的聚合,从而弥补特征矩阵的各位置的特征值之间可能存在的相位差在类概率聚合上导致的负面影响(也就是,从波函数原理出发的同相加强和异相抵消),以提升所述拓扑全局表面状态特征矩阵的分类效果,进而提高分类的准确性。这样,能够在所述硝化抑制剂的包覆过程中对硝化抑制剂在内核表面的包覆均匀性进行智能准确地分析与判断,以提高最终的成型质量,进而提高土壤的增效效果。
33.基于此,本技术提出了一种具有机器视觉的用于增效剂内核的智能涂覆系统,其包括:图像采集模块,用于获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;局部视角特征提取模块,用于将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;不同视角比较模块,用于计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;二维结构化模块,用于将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;图结构数据编码模块,用于将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;特征分布校正模块,用于基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;以及,包覆效果判断模块,用于将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
34.图1b图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的应用场景图。如图1b所示,在该应用场景中,通过多个摄像头(例如,如图1b中所示意的c1-cn)从不同拍摄视角采集在所述智能涂覆设备对所述内核的表面涂覆消化抑制剂的过程中的多个侧面图像(例如,图1b中的f1-fn)。然后,将所述多个侧面图像输入至部署有智能包覆算法的服务器(例如,如图1b中所示意的s)中,其中,所述服务器能够以所述智能包覆算法对所述多个侧面图像进行处理以生成用于表示硝化抑制剂涂覆于内核的涂覆均匀
度是否满足预定标准的分类结果。这样,对涂覆均匀度进行智能监测与把控,以提高最终缓释增效剂成型质量。
35.在介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术的各种非限制性实施例。
36.示例性系统:图2图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的框图。如图2所示,根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统300,包括:图像采集模块310;局部视角特征提取模块320;不同视角比较模块330;二维结构化模块340;图结构数据编码模块350;特征分布校正模块360;以及,包覆效果判断模块370。
37.其中,所述图像采集模块310,用于获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;所述局部视角特征提取模块320,用于将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;所述不同视角比较模块330,用于计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;所述二维结构化模块340,用于将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;所述图结构数据编码模块350,用于将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;特征分布校正模块,用于基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;以及,所述包覆效果判断模块360,用于将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
38.图3图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统的系统架构图。如图3所示,首先通过所述图像采集模块310获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;然后,所述局部视角特征提取模块320将所述图像采集模块310获取的所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;所述不同视角比较模块330计算所述局部视角特征提取模块320得到的所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;接着,所述二维结构化模块340将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;所述图结构数据编码模块350将所述二维结构化模块340得到的所述全局表面状态特征矩阵和所述不同视角比较模块330计算所得的所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;所述特征分布校正模块360基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;进而,所述包覆效果判断模块370将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
39.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述图像采集模块310,用于获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制
剂的内核的多个侧面图像。相应地,在对于硝化抑制剂涂覆于内核表面的均匀性进行检测,以保证其在土壤中能够以各向均匀地向所述土壤缓释所述硝化抑制剂来提高所述土壤增效效果时,由于涂覆于所述内核表面的硝化抑制剂在不同的角度上具有不同的均匀性特征信息,并且这些特征信息之间是具有关联性特征分布的。因此,在本技术的技术方案中,选择从多个角度来采集的涂覆有硝化抑制剂的内核的多个侧面图像作为输入数据,更具体地,可通过部署于不同角度的多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像。
40.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述局部视角特征提取模块320,用于将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量。也就是,使用在图像的局部隐含特征提取方面具有优异表现的作为过滤器的第一卷积神经网络模型对于所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别进行处理,以分别提取出所述各个侧面图像的局部隐含特征在高维空间中的特征分布表示,从而得到多个侧面表面状态特征向量。
41.图4图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统中第一卷积神经网络特征提取过程的流程图。如图4所示,所述第一卷积神经网络特征提取过程,包括:s210,对输入数据进行卷积处理以得到卷积特征图;s220,对所述卷积特征图进行基于局部特征矩阵的均值池化以得到池化特征图;以及,s230,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述作为过滤器的第一卷积神经网络的最后一层的输出为所述多个侧面表面状态特征向量,所述作为过滤器的第一卷积神经网络的第一层的输入为所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像。
42.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述不同视角比较模块330,用于计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵。应可以理解,由于所述内核是立体的,考虑到所述内核的各个表面具有关联性的特征信息,并且当涂覆于所述内核的硝化抑制剂覆盖均匀时,那么所述内核的各个表面的均匀性特征相一致,因此,可以利用所述内核的各个表面的关于硝化抑制剂覆盖的相似度特征信息来辅助进行均匀度判断,进而进一步提高分类的精准度。也就是,进一步计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵。
43.在本技术的一个具体示例中,所述不同视角比较模块,进一步用于:以如下公式来计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到多个余弦距离;其中,所述公式为:其中和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量,和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量的各个位置的特征值,表示所述多个侧面表面状态特征向量中每两个侧面
表面状态特征向量之间的余弦距离;以及,将所述多个余弦距离进行二维排列为所述余弦距离矩阵。
44.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述二维结构化模块340,用于将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵。也就是,将所述多个侧面表面状态特征向量进行二维排列以整合所述内核的各个侧面图像的隐含特征分布信息,从而得到全局表面状态特征矩阵。
45.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述图结构数据编码模块350,用于将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵。更具体地,以所述涂覆有硝化抑制剂的内核的多个侧面图像的特征向量作为节点,以每两个所述侧面特征向量之间的余弦距离作为节点与节点之间的关联,这样再使用图神经网络模型进行处理来得到所述内核的多个侧面的包含各个节点的相似度的全局表面均匀性特征表示,以此来提高分类的精度以及最终的缓释增效剂的成型质量。也就是,进一步将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络中进行处理,以生成包含有所述内核的多个侧面图像特征信息与不规则的所述各个图像表面均匀度相似关联特征的拓扑全局表面状态特征矩阵。
46.在本技术的一个具体示例中,在所述图结构数据编码模块中,所述图神经网络通过可学习的神经网络参数来对所述全局表面状态特征矩阵和所述余弦距离矩阵进行处理以得到包含不同侧面图像之间的相似度特征和各个侧面图像的图像特征的所述拓扑全局表面状态特征矩阵。
47.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述特征分布校正模块360,用于基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵。特别地,在本技术的技术方案中,这里,在将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络得到所述拓扑全局表面状态特征矩阵时,由于所述拓扑全局表面状态特征矩阵的与所述侧面表面状态特征向量相同维度的每个特征向量,例如,假定为行向量之间的相关性较低,因此当所述拓扑全局表面状态特征矩阵作为整体通过分类器进行分类时,由于行向量之间的低相关性导致的行向量之间的相位差可能会对分类器的分类解的类概率聚合造成负面影响。
48.因此,在本技术的技术方案中,优选地对所述拓扑全局表面状态特征矩阵进行的波函数表征聚合,具体为:其中是所述拓扑全局表面状态特征矩阵的最大特征值的倒数。
49.这里,通过引入矩阵的波函数表示,即幅度表示强度信息,而相位表示周期位置信息,可以对特征矩阵的各个位置的特征值的信息表征进行类复函数域的聚合,从而弥补特征矩阵的各位置的特征值之间可能存在的相位差在类概率聚合上导致的负面影响(也就是,从波函数原理出发的同相加强和异相抵消),以提升所述拓扑全局表面状态特征矩阵的分类效果,进而提高分类的准确性。这样,能够在所述硝化抑制剂的包覆过程中对硝化抑制剂在内核表面的包覆均匀性进行智能准确地分析与判断,以提高最终的成型质量,进而提
高土壤的增效效果。
50.在本技术的一个具体示例中,所述特征分布校正模块,进一步用于:基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,以如下公式对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到所述校正后拓扑全局表面状态特征矩阵;其中,所述公式为:其中表示所述拓扑全局表面状态特征矩阵,表示所述拓扑全局表面状态特征矩阵的最大特征值的倒数,表示所述校正后拓扑全局表面状态特征矩阵,表示按位置点乘。
51.具体地,在所述具有机器视觉的用于增效剂内核的智能涂覆系统300的运行过程中,所述包覆效果判断模块370,用于将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
52.图5图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统中包覆效果判断模块的框图。如图5所示,所述包覆效果判断模块370,包括;展开单元371,用于将所述校正后拓扑全局表面状态特征矩阵沿着行向量或列向量展开为一维的分类特征向量;全连接编码单元372,用于将所述分类特征向量输入所述分类器的至少一个全连接层以得到编码分类特征向量;分类单元373,用于将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
53.综上,根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆系统300被阐明,其中,所述智能涂覆设备通过机器视觉来判断硝化抑制剂涂覆于内核表面的涂覆状态,从而对涂覆均匀度进行智能监测与把控,以提高最终缓释增效剂成型质量。
54.示例性方法:图6图示了根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆方法的流程图。如图6所示,根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆方法,包括步骤:s110,获取由多个摄像头从不同拍摄视角采集的涂覆有硝化抑制剂的内核的多个侧面图像;s120,将所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像分别通过作为过滤器的第一卷积神经网络模型以得到多个侧面表面状态特征向量;s130,计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到余弦距离矩阵;s140,将所述多个侧面表面状态特征向量进行二维排列以得到全局表面状态特征矩阵;s150,将所述全局表面状态特征矩阵和所述余弦距离矩阵通过图神经网络以得到拓扑全局表面状态特征矩阵;s160,基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到校正后拓扑全局表面状态特征矩阵;以及,s170,将所述校正后拓扑全局表面状态特征矩阵通过分类器以得到分类结果,所述分类结果用于表示硝化抑制剂涂覆于内核的涂覆均匀度是否满足预定标准。
55.在一个示例中,在上述具有机器视觉的用于增效剂内核的智能涂覆方法中,所述步骤s120,包括:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于
局部特征矩阵的均值池化以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述作为过滤器的第一卷积神经网络的最后一层的输出为所述多个侧面表面状态特征向量,所述作为过滤器的第一卷积神经网络的第一层的输入为所述涂覆有硝化抑制剂的内核的多个侧面图像中各个侧面图像。
56.在一个示例中,在上述具有机器视觉的用于增效剂内核的智能涂覆方法中,所述步骤s130,进一步用于:以如下公式来计算所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离以得到多个余弦距离;其中,所述公式为:其中和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量,和分别表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量的各个位置的特征值,表示所述多个侧面表面状态特征向量中每两个侧面表面状态特征向量之间的余弦距离;以及,将所述多个余弦距离进行二维排列为所述余弦距离矩阵。
57.在一个示例中,在上述具有机器视觉的用于增效剂内核的智能涂覆方法中,所述步骤s150,所述图神经网络通过可学习的神经网络参数来对所述全局表面状态特征矩阵和所述余弦距离矩阵进行处理以得到包含不同侧面图像之间的相似度特征和各个侧面图像的图像特征的所述拓扑全局表面状态特征矩阵。
58.在一个示例中,在上述具有机器视觉的用于增效剂内核的智能涂覆方法中,所述步骤s160,进一步用于:基于所述拓扑全局表面状态特征矩阵的最大特征值的倒数,以如下公式对所述拓扑全局表面状态特征矩阵中各个位置的特征值进行波函数表征聚合以得到所述校正后拓扑全局表面状态特征矩阵;其中,所述公式为:其中表示所述拓扑全局表面状态特征矩阵,表示所述拓扑全局表面状态特征矩阵的最大特征值的倒数,表示所述校正后拓扑全局表面状态特征矩阵,表示按位置点乘。
59.在一个示例中,在上述具有机器视觉的用于增效剂内核的智能涂覆方法中,所述步骤s170,包括:将所述校正后拓扑全局表面状态特征矩阵沿着行向量或列向量展开为一维的分类特征向量;将所述分类特征向量输入所述分类器的至少一个全连接层以得到编码分类特征向量;将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
60.综上,根据本技术实施例的具有机器视觉的用于增效剂内核的智能涂覆方法被阐明,其通过从多个角度来采集的涂覆有硝化抑制剂的内核的多个侧面图像作为输入数据,并利用深度神经网络模型来作为特征提取器来分别挖掘出所述多个侧面图像的硝化抑制剂涂覆的均匀性隐含特征,再以所述涂覆有硝化抑制剂的内核的多个侧面图像的特征向量
作为节点,以每两个所述侧面特征向量之间的余弦距离作为节点与节点之间的关联,使用图神经网络进行编码,继而通过波函数表征聚合得到包含各个节点的相似度的全局表面均匀性特征表示,以此来提高分类的精度,进而提高缓释增效剂最终的成型质量。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。