一种基于uwb的测向定位装置和测向定位方法
技术领域
1.本发明涉及测向定位技术领域,特别涉及一种基于uwb的测向定位装置和测向定位方法。
背景技术:
2.感知层是物联网技术发展的基石,是信息采集的关键部分,其中测向定位技术可以让终端设备知道自己在参考坐标系中的坐标和方位角度,是终端设备执行指令的一项非常重要的数据。
3.在当下测向定位技术中,多采用地磁传感器、惯性导航技术或蓝牙aoa等组合,但是上述技术方案各有缺陷。如地磁传感器易受磁场、金属干扰,惯性导航技术随着运行时间增长累积误差会逐渐增加,蓝牙aoa精度较低且测向范围较近等。
4.普通的基站aoa技术,无法实现标签的姿态识别。如何在统一的坐标系下,让系统内的标签不仅可以知道自身的坐标,也可以知道自身的姿态是一项亟需解决的问题。
技术实现要素:
5.本发明的主要目的是提供一种基于aoa tof的组合定位系统,并基于此系统实现在统一坐标系下,在终端设备获知自身坐标的前提下,同时获知自身的姿态朝向,从而实现测向和定位的基于uwb的测向定位装置和测向定位方法。
6.本发明提出一种基于uwb的测向定位装置,包括部署在固定位置的基站和固定在设备上的标签,所述基站和所述标签上均设置有uwb天线阵列,所述基站和所述标签之间通过所述uwb天线阵列进行通信;所述uwb天线阵列包括uwb天线阵列壳体、mcu、uwb芯片和至少三个uwb天线,所述mcu和所述uwb芯片设置在所述uwb天线阵列壳体内;所述uwb天线和所述uwb芯片连接后和所述mcu连接,分别以所述基站和所述标签的朝向建立第一坐标系x1和第二坐标系x2,根据所述标签在所述第一坐标系x1的角度以及所述基站在所述第二坐标系x2内的角度,从而计算出所述标签在所述第一坐标系x1内的朝向。
7.优选地,所述uwb天线共有三个,且所述uwb天线在所述uwb天线阵列壳体上呈正三角形排布。
8.一种基于uwb的测向定位方法,具体方法为:1)所述标签通过所述标签上的任一uwb天线发送blink帧,并记录下第一发送时刻txblink;2)所述基站上的uwb天线接收所述blink帧,记录下uwb天线的第一接收相位,同时记录下第一接收时刻rxblink;3)所述基站上的mcu根据第一接收相位计算出uwb天线的第一接收相位差,并以所述基站朝向建立第一坐标系x1,根据所述第一接收相位差可以计算在第一坐标系x1内所述标签所在的第一方位角度θ:4)所述基站通过任一uwb天线向所述标签发射response帧,并将发射response帧
的第二发射时刻txresp、第一接收时刻rxblink、以及计算出的第一方位角度θ填充到response帧中发射给所述标签;5)所述标签上的uwb天线接收到所述response帧,记录下uwb天线的第二接收相位,同时记录下第二接收时刻rxresp,并且可以得到所述标签相对于所述基站的频偏r;6)所述标签上的mcu根据第二接收相位计算出uwb天线的第二接收相位差,并以标签朝向建立第二坐标系x2,根据所述第二接收相位差可以计算在第二坐标系x2内所述基站所在的第二方位角度β,并且计算出标签和基站之间的距离d:d = ((rxresp
ꢀ‑ꢀ
txblink)-(txresp
ꢀ‑ꢀ
rxblink))*(1-r)*c/2,其中c为光速;7)当使用所述第一坐标系x1为最终参考系时,可以得出所述标签在所述第一坐标系x1中的坐标为:x = d*cosθ,y = d*sinθ,通过所述第一坐标系x1内所述标签所在的所述第一方位角度θ,以及所述第二坐标系x2内所述基站所在的所述第二方位角度β,从而计算出所述标签的朝向在所述第一坐标系x1内的第三方位角度α:α = θ-β π,从而实现测向和定位的设计目的。
9.本发明的基于uwb的测向定位装置和测向定位方法的有益效果为:1、相对于现有地磁传感器、惯性导航技术等测向定位技术,本技术描述的方法,不容易受到金属干扰,也不会产生累积误差;相对于通用的aoa定位技术而言,本方案不仅可以获取自身的坐标,还可以获取自身在统一坐标系下的姿态朝向。
10.2、且相对于现有地磁传感器、惯性导航技术等测向定位技术,精度更高,可靠性更优异。
附图说明
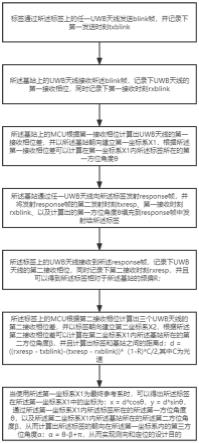
11.图1为本发明的基于uwb的测向定位装置和测向定位方法的流程图。
12.图2为本发明的基于uwb的测向定位装置和测向定位方法的uwb天线阵列的结构框图。
13.图3为本发明的基于uwb的测向定位装置和测向定位方法的uwb天线的排布图。
14.图4为本发明的基于uwb的测向定位装置和测向定位方法的示意图。
15.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
16.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.参照图1至图4,提出本发明的基于uwb的测向定位装置的实施例:一种基于uwb的测向定位装置,包括部署在固定位置的基站和固定在设备上的标签,基站和标签上均设置有uwb天线阵列,基站和标签之间通过uwb天线阵列进行通信。
18.uwb天线阵列包括uwb天线阵列壳体、mcu、uwb芯片、电源和三个在uwb天线阵列壳体上呈正三角形排布的uwb天线,电源、mcu和uwb芯片设置在uwb天线阵列壳体内;uwb天线
和uwb芯片连接后和mcu连接。通过电源给mcu、uwb芯片以及uwb天线供电。
19.分别以基站和标签的朝向建立第一坐标系x1和第二坐标系x2,根据标签在第一坐标系x1的角度以及基站在第二坐标系x2内的角度,从而计算出标签在第一坐标系x1内的朝向。
20.参照图1至图4,提出本发明的基于uwb的测向定位方法的一实施例:一种基于uwb的测向定位装置和测向定位方法,具体方法为:1)标签通过标签上的任一uwb天线发送blink帧,并记录下第一发送时刻txblink;2)基站上的三个uwb天线接收blink帧,记录下三个uwb天线的第一接收相位phi1、phi2和phi3,同时记录下第一接收时刻rxblink;3)基站上的mcu根据第一接收相位phi1、phi2和phi3计算出三个uwb天线的第一接收相位差:pdoa12 = phi1
ꢀ‑ꢀ
phi2,pdoa23 = phi2
ꢀ‑ꢀ
phi3,pdoa31 = phi3
ꢀ‑ꢀ
phi1,并以基站朝向建立第一坐标系x1,通过下列计算公式,计算在第一坐标系x1内标签所在的第一方位角度θ:θ = atan2(√3*pdoa12 , (pdoa31
ꢀ‑ꢀ
pdoa23)),其中θ的范围为-π~π ;4)基站端通过任一uwb天线发射response帧,并将发射response帧的第二发射时刻txresp、第一接收时刻rxblink、以及计算出的第一方位角度θ填充到response帧中发射给标签;5)标签上的三个uwb天线接收到response帧后,记录下三个uwb天线的第二接收相位phi4、phi5和phi6,同时记录下第二接收时刻rxresp,并且可以得到标签相对于基站的频偏r;6)标签上的mcu根据第二接收相位phi4、phi5和phi6计算出三个uwb天线的第二接收相位差:pdoa45 = phi4
ꢀ‑ꢀ
phi5,pdoa56 = phi5
ꢀ‑ꢀ
phi6,pdoa64 = phi6
ꢀ‑ꢀ
phi4,以标签朝向建立第二坐标系x2,根据第二接收相位差可以计算在第二坐标系x2内基站所在的第二方位角度β:β = atan2(√3*pdoa45 , (pdoa64
ꢀ‑ꢀ
pdoa56)),其中β的范围为-π~π可以计算出标签和基站之间的距离d为:d = ((rxresp
ꢀ‑ꢀ
txblink)-(txresp
ꢀ‑ꢀ
rxblink))*(1-r)*c/2,其中c为光速;7)当使用第一坐标系x1为最终参考系时,可以得出标签在第一坐标系x1中的坐标为:x = d*cosθ,y = d*sinθ,通过第一坐标系x1内标签所在的第一方位角度θ,以及第二坐标系x2内基站所在的第二方位角度β,从而计算出标签的朝向在第一坐标系x1内的第三方位角度α:
α = θ-β π,从而实现测向和定位的设计目的。
21.使用的时候,由于基站和标签的距离相对较远,且uwb天线阵列上的uwb天线之间的间隔较小,实测中在1m范围内的误差也不会超过一度,而在更远的距离内误差也就更小可以忽略不计,因此无论是哪一个天线发射都可以等效为中心发射。
22.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。