1.本发明涉及风噪处理技术领域,具体为一种基于无人机异常声音检测的风噪处理方法及系统。
背景技术:
2.声学成像仪可用于对某些场景进行异常点检测,例如可用于对带压气体泄漏进行检测,或用于对电力设备局部放电进行检测。现有技术中,大都是人工手持声学成像仪对待检测场景进行检测,每次检测都需要工作人员进入待检测场景且需要呆到对整个待检测场景都检测完成为止,一方面会花费工作人员大量时间,另一方面待检测场景通常具有一定危险,工作人员长时间呆在待检测场景的风险性较大。
3.为此,现有技术还有提出过通过无人机搭载声学成像仪来对某些场景进行异常点检测。但是,无人机在飞行过程中可能会受到风噪的影响(风噪是起风时气流与麦克风振膜之间碰撞形成的),使得声学成像仪采集到的音频不能有效用于异常声音检测,即当某一音频具有异常声音且具有风噪时,风噪会使得声学成像仪最终确定的异常声音声源位置产生偏移。
技术实现要素:
4.本发明针对现有技术存在的问题,提出了一种基于无人机异常声音检测的风噪处理方法及系统,能够采集至少四个不同朝向的音频,并通过音频间的相关性值查找出没有风噪的音频,直接采用无风噪音频进行异常声音判定,其判定结果更为准确。
5.本发明解决其技术问题所采用的技术方案是:一种基于无人机异常声音检测的风噪处理方法,包括以下步骤l1.设定无人机的巡检路径,且在所述巡检路径上设定多个检测点;l2.驱动无人机前进至下一检测点,且第一计数器计数值和第二计数器计数值清零;l3.在当前检测点上通过至少四个麦克风采集无人机不同方向上的音频;l4.提取音频上的音频点数据以形成对应的音频数据组;l5.计算全部音频数据组两两之间的相关性值;l6.获取相关性值中的最大相关性值;l7.将所述最大相关性值与第一预设阈值进行比对,当所述最大相关性值大于等于第一预设阈值时,判定与所述最大相关性值对应的两音频均没有风噪,选择两音频中的任意一音频作为异常声音检测音频,并返回l2;当所述最大相关性值小于第一预设阈值时,进入l8;l8.将所述最大相关性值与第二预设阈值进行比对,当所述最大相关性值大于等于第二预设阈值时,判定与所述最大相关性值对应的两音频中有一个音频没有风噪,且将对应的两音频记作音频a和音频b,并进入l9;当所述最大相关性值小于第二预设阈值时,判
定全部音频均有风噪,并返回l3;l9.获取相关性值中的最小相关性值,并获取与所述最小相关性值对应的两音频中的任意一个音频,且将对应音频记作音频c;l10.计算音频c与音频a对应的两音频数据组的相关性值以及音频c与音频b对应的两音频数据组的相关性值,当音频c与音频a对应得到的相关性值大于音频c与音频b对应得到的相关性值时,判定音频a没有风噪,将音频a作为异常声音检测音频,并返回l2;当音频c与音频a对应得到的相关性值小于音频c与音频b对应得到的相关性值时,判定音频b没有风噪,将音频b作为异常声音检测音频,并返回l2。
6.作为优选,所述l8中,当全部音频均有风噪时,还包括以下步骤l81.获取与所述最大相关性值对应的两音频,且将对应音频记作音频d1和音频f1;l82.获取当前检测点的背景声音频h;l83.将音频d1与背景声音频h做差得到音频d2,将音频f1与背景声音频h做差得到音频f2;l84.提取音频d2和音频f2上的音频点数据以形成对应的音频数据组d2和音频数据组f2;l85.计算音频数据组d2和音频数据组f2的相关性值;l86.当所述相关性值小于第三预设阈值时,判定音频d1与音频f1均无异常声音,返回l2;当所述相关性值大于等于第三预设阈值时,判定音频d1与音频f1均有异常声音,第一计数器计数值加一,且将第一计数器计数值与预设计数阈值一进行比对,当第一计数器计数值小于预设计数阈值一时,返回l3;当第一计数器计数值等于预设计数阈值一时,返回l2。
7.作为优选,所述l86中,当音频d1与音频f1均有异常声音且计数器计数值等于预设计数阈值一时,还包括以下步骤l861获取一个预估异常声音检测音频m;l862将音频d1与预估异常声音检测音频m做差得到音频d3,将音频f1与预估异常声音检测音频m做差得到音频f3;l863提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3;l864计算音频数据组d3和音频数据组f3的相关性值;l865当所述相关性值小于第四预设阈值时,将所述预估异常声音检测音频m作为异常声音检测音频,并返回l2;当所述相关性值大于等于第四预设阈值时,第二计数器计数值加一,且将第二计数器计数值与预设计数阈值二进行比对,当第二计数器计数值小于预设计数阈值二时,返回l861;当第二计数器计数值等于预设计数阈值二时,返回l2。
8.作为优选,所述l861获取预估异常声音检测音频m具体包括以下步骤s1.判定是否为第一次获取预估异常声音检测音频m,是则进入s2,否则进入s3;s2.获取上一检测点的异常声音检测音频,当所述异常声音检测音频的检测结果为具有异常声音时,将所述异常声音检测音频作为预估异常声音检测音频m;当所述异常声音检测音频的检测结果为不具有异常声音时,预估异常声音检测音频m获取失败,返回l2;
s3.将当前预估异常声音检测音频m与当前背景声音频h做差得到异常声音频g1,并对异常声音频g1进行调整以得到异常声音频g2,并将异常声音频g2与当前背景声音频h相加得到预估异常声音检测音频m。
9.作为优选,所述s3中对异常声音频g1进行调整具体为对异常声音频g1的幅值进行调整。
10.一种基于无人机异常声音检测的风噪处理系统,应用于上述风噪处理方法,包括音频采集模块,用于在当前检测点上通过至少四个麦克风采集无人机不同方向上的音频;第一音频数据组形成模块,用于提取音频上的音频点数据以形成对应的音频数据组;第一相关性值计算模块,用于计算全部音频数据组两两之间的相关性值;最大相关性值获取模块,用于获取相关性值中的最大相关性值;最大相关性值第一判定模块,用于将最大相关性值与第一预设阈值进行比对,当所述最大相关性值大于等于第一预设阈值时,判定与所述最大相关性值对应的两音频均没有风噪,选择两音频中的任意一音频作为异常声音检测音频;最大相关性值第二判定模块,用于将所述最大相关性值与第二预设阈值进行比对,当所述最大相关性值大于等于第二预设阈值时,判定与所述最大相关性值对应的两音频中有一个音频没有风噪;当所述最大相关性值小于第二预设阈值时,判定全部音频均有风噪;音频a音频b确定模块,用于在最大相关性值第二判定模块判定与所述最大相关性值对应的两音频中有一个音频没有风噪时,将对应的两音频记作音频a和音频b;音频c确定模块,用于在最大相关性值第二判定模块判定与所述最大相关性值对应的两音频中有一个音频没有风噪时,获取相关性值中的最小相关性值,并获取与所述最小相关性值对应的两音频中的任意一个音频,且将对应音频记作音频c;第二相关性值计算模块,用于计算音频c与音频a对应的两音频数据组的相关性值以及音频c与音频b对应的两音频数据组的相关性值;相关性值比对模块,用于当音频c与音频a对应得到的相关性值大于音频c与音频b对应得到的相关性值时,判定音频a没有风噪,将音频a作为异常声音检测音频;当音频c与音频a对应得到的相关性值小于音频c与音频b对应得到的相关性值时,判定音频b没有风噪,将音频b作为异常声音检测音频。
11.作为优选,所述风噪处理系统还包括音频d1音频f1获取模块,用于在最大相关性值第二判定模块判定全部音频均有风噪时,获取与所述最大相关性值对应的两音频,且将对应音频记作音频d1和音频f1;背景声音频h获取模块,用于获取当前检测点的背景声音频h;音频d2音频f2计算模块,用于将音频d1与背景声音频h做差得到音频d2,将音频f1与背景声音频h做差得到音频f2;第二音频数据组形成模块,用于提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3;第三相关性值计算模块,用于计算音频数据组d2和音频数据组f2的相关性值;
相关性值判定模块一,用于当所述相关性值小于第三预设阈值时,判定音频d1与音频f1均无异常声音;当所述相关性值大于等于第三预设阈值时,判定音频d1与音频f1均有异常声音;第一计数器,用于当所述相关性值判定模块一判定音频d1与音频f1均有异常声音,第一计数器计数值加一;第一计数值判定模块,用于当所述第一计数器计数值加一时,将所述第一计数器计数值与预设计数阈值一进行比对。
12.作为优选,所述风噪处理系统还包括预估异常声音检测音频m获取模块,用于当音频d1与音频f1均有异常声音且第一计数器计数值等于预设计数阈值一时,获取一个预估异常声音检测音频m;音频d3音频f3计算模块,用于将音频d1与预估异常声音检测音频m做差得到音频d3,将音频f1与预估异常声音检测音频m做差得到音频f3;第三音频数据组形成模块,用于提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3;第四相关性值计算模块,用于计算音频数据组d3和音频数据组f3的相关性值;相关性值判定模块二,用于当所述相关性值小于第四预设阈值时,将所述预估异常声音检测音频m作为异常声音检测音频;第二计数器,用于当所述相关性值大于等于第四预设阈值时,第二计数器计数值加一;第二计数值判定模块,用于当所述第二计数器计数值加一时,将所述第二计数器计数值与预设计数阈值二进行比对。
13.作为优选,所述预估异常声音检测音频m获取模块包括音频m获取次数判定单元,用于判定是否为第一次获取所述预估异常声音检测音频m;音频m第一获取单元,用于当所述音频m获取次数判定单元判定所述预估异常声音检测音频m是第一次获取时,获取上一检测点的异常声音检测音频,且当所述异常声音检测音频的检测结果为具有异常声音时,将所述异常声音检测音频作为预估异常声音检测音频m;当所述异常声音检测音频的检测结果为不具有异常声音时,预估异常声音检测音频m获取失败;音频m第二获取单元,用于当所述音频m获取次数判定单元判定所述预估异常声音检测音频m不是第一次获取时,将上一次的预估异常声音检测音频m与当前背景声音频h做差得到异常声音频g1,并对异常声音频g1进行调整以得到异常声音频g2,并将异常声音频g2与当前背景声音频h相加得到当前的预估异常声音检测音频m。
14.作为优选,所述音频m第二获取单元包括异常声音频g1调整子单元,用于对异常声音频g1的幅值进行调整。
15.有益效果本发明实施例能够采集至少四个不同朝向的音频,并通过音频间的相关性值查找出没有风噪的音频,相比只采集单一或少数朝向的音频,其获取无风噪音频的概率将大大提高,而直接采用无风噪音频进行异常声音判定的方式相比先对有风噪的音频进行降噪然后再通过降噪后的音频进行异常声音判定的方式,其判定结果更为准确,特别是对异常声
音声源位置的确定更为准确;本发明实施例能够在四个音频都有风噪的前提下,先对其是否具有异常声音进行判定,如果没有异常声则可直接前进至下一检测点进行音频采集,省去了当前检测点的无用的音频采集循环次数;本发明实施例能够在多个音频都有风噪且都有异常声音的前提下,先获取一个预估异常声音检测音频m,通过不断调整预估异常声音检测音频m的方式得到一个合适的无风噪的异常声音检测音频,相比直接降噪的方式,本实施例方式得到的异常声音检测音频更好,能够更加准确有效地进行异常音判定。
附图说明
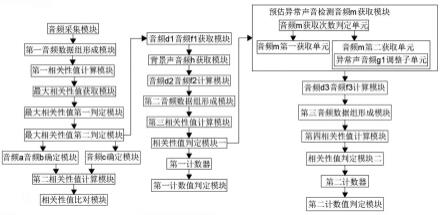
16.图1为本发明实施例中风噪处理系统的示意图。
具体实施方式
17.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
18.实施例1:一种基于无人机异常声音检测的风噪处理方法,包括以下步骤l1.设定无人机的巡检路径,且在所述巡检路径上设定多个检测点。在对某一场景进行异常点检测前,需要事先根据待检测场景的实际情况确定好无人机的巡检路径,并在巡检路径上大致确定好检测点,例如每隔0.5米可以作为一个检测点。当无人机飞行到该检测点时,需要悬停并通过声学成像仪上的麦克风采集当前检测点上的音频以对待检测场景内的异常点进行检测。
19.l2.驱动无人机前进至下一检测点,且第一计数器计数值和第二计数器计数值清零。当上一检测点检测完成后,需要驱动无人机继续前进,当无人机前进至当前检测点时,就可以开始对当前的检测点进行异常点检测了。同时需要将第一计数器计数值和第二计数器计数值清零。
20.l3.在当前检测点上通过至少四个麦克风采集无人机不同方向上的音频。例如,本实施例可以设置四个麦克风。第一麦克风朝向无人机的左边设置,用于采集第一音频;第二麦克风朝向无人机的右边设置,用于采集第二音频;第三麦克风朝向无人机的后边设置,用于采集第三音频;第四麦克风朝向无人机的前边设置,用于采集第四音频。每一音频的时长可以是10秒。
21.l4.提取音频上的音频点数据以形成对应的音频数据组。以第一音频为例,从0秒开始以一定的时间间隔采集音频上的音频点数据,全部音频点数据按采集顺序排列形成第一音频数据组。第二音频、第三音频和第四音频以同样的方式处理,得到相应的第二音频数据组、第三音频数据组和第四音频数据组。
22.l5.计算全部音频数据组两两之间的相关性值。例如,第一音频数据组与第二音频数据组计算得到的相关性值为1号相关性值,第一音频数据组与第三音频数据组计算得到的相关性值为2号相关性值,第一音频数据组与第四音频数据组计算得到的相关性值为3号相关性值,第二音频数据组与第三音频数据组计算得到的相关性值为4号相关性值,第二音频数据组与第四音频数据组计算得到的相关性值为5号相关性值,第三音频数据组与第四音频数据组计算得到的相关性值为6号相关性值。另外,两音频数据组之间的相关性值具体
怎么计算可直接采用现有技术。
23.l6.获取相关性值中的最大相关性值。例如,本实施例中3号相关性值是最大的。
24.l7.将所述最大相关性值与第一预设阈值进行比对,当所述最大相关性值大于等于第一预设阈值时,判定与所述最大相关性值对应的两音频均没有风噪,选择两音频中的任意一音频作为异常声音检测音频,并返回l2;当所述最大相关性值小于第一预设阈值时,进入l8。
25.一个音频通常由背景噪音(由周围的环境噪音和无人机飞行时自身发出的噪音组成)、异常声音(可能有也可能没有,当检测点附近有异常点时,就会有异常声音,当检测点附近没有异常点时,就没有异常声音)和风噪(可能有也可能没有,当某一方向上出现风时,那对应方向上的麦克风采集到的音频就会有风噪,否则就没有风噪)组成。
26.其中,无人机在同一检测点同一时刻通过不同麦克风采集到不同音频中,背景噪音和异常声音几乎都是相同的,而风噪是各不相同的(跟风噪的自身特性相关,任意两个风噪都是完全不同的)。所以当两个音频都有风噪时,那这两个音频的相关性值就比较小(可以通过第二预设阈值进行判定,当相关性值小于第二预设阈值时,表示两个音频的相关性值就比较小)。当两个音频都没有风噪时,那这两个音频的相关性值就比较大(可以通过第一预设阈值进行判定,当相关性值大于等于第一预设阈值时,表示两个音频的相关性值就比较大)。当两个音频一个有风噪一个没有风噪时,那这两个音频的相关性值就比较适中(可以通过第一预设阈值和第二预设阈值进行判定,当相关性值大于等于第二预设阈值且小于第一预设阈值时,表示两个音频的相关性值就比较适中)。
27.为此,本实施例需要先看最大的3号相关性值,当3号相关性值大于等于第一预设阈值时,判定与3号相关性值对应的第一音频和第四音频均没有风噪,可以选择第一音频作为异常声音检测音频。由于第一音频中没有风噪,所以能够有效地进行异常声音检测,如果当前检测点附加有异常点时,就能够准确地确定异常点的声源位置。所以,当前检测点的音频获取任务就结束了,可以直接返回l2。其中,第一预设阈值可根据历史实验数据人为设定。另外,本实施例说的没有风噪并不是说绝对没有风噪,而是说该风噪有可能很小很小,可以忽略不计。
28.l8.将所述最大相关性值与第二预设阈值进行比对,当所述最大相关性值大于等于第二预设阈值时,判定与所述最大相关性值对应的两音频中有一个音频没有风噪,且将对应的两音频记作音频a和音频b,并进入l9;当所述最大相关性值小于第二预设阈值时,判定全部音频均有风噪,并返回l3。
29.当3号相关性值小于第一预设阈值时,就需要将3号相关性值再与第二预设阈值进行比对。如果3号相关性值大于等于第二预设阈值,就表示第一音频和第四音频中有一个音频没有风噪(且四个音频中只有一个音频没有风噪),并将第一音频记作音频a,将第四音频记作音频b。如果3号相关性值小于第二预设阈值,那么对应的第一音频和第四音频就都有风噪,另外,可以推测其他的相关性值都小于第二预设阈值,所以可以判定本次采集的四个音频(第一音频、第二音频、第三音频和第四音频)都有风噪,故本次采集的四个音频都不要了,重新返回l3进行音频的重新采集。其中,第二预设阈值可根据历史实验数据人为设定。
30.l9.获取相关性值中的最小相关性值,并获取与所述最小相关性值对应的两音频中的任意一个音频,且将对应音频记作音频c。
31.当3号相关性值大于等于第二预设阈值时,本实施例还需要获取与所述最小相关性值对应的两音频,例如可能是第二音频和第三音频,与最小相关性值对应的第二音频和第三音频肯定是都有风噪的,此时随机选取一个音频,例如可以是第二音频,并将第二音频记作音频c。
32.l10.计算音频c与音频a对应的两音频数据组的相关性值以及音频c与音频b对应的两音频数据组的相关性值,当音频c与音频a对应得到的相关性值大于音频c与音频b对应得到的相关性值时,判定音频a没有风噪,将音频a作为异常声音检测音频,并返回l2;当音频c与音频a对应得到的相关性值小于音频c与音频b对应得到的相关性值时,判定音频b没有风噪,将音频b作为异常声音检测音频,并返回l2。
33.当音频c获取完成之后,再计算音频c与音频a对应的两音频数据组的相关性值(相当于重新计算第二音频数据组与第一音频数据组的相关性值以得到7号相关性值),以及计算音频c与音频b对应的两音频数据组的相关性值(相当于重新计算第二音频数据组与第四音频数据组的相关性值以得到8号相关性值)。当7号相关性值大于8号相关性值时,可以推测出音频a没有风噪,将音频a(即第一音频)作为异常声音检测音频,此时,当前检测点的音频获取任务就结束了,可以直接返回l2。当7号相关性值小于8号相关性值时,可以推测出音频b没有风噪,将音频b(即第四音频)作为异常声音检测音频,此时,当前检测点的音频获取任务就结束了,可以直接返回l2。
34.现有技术中,声学成像仪的麦克风大都朝向一个方向,因此采集得到的音频中很大概率会有风噪,而现有技术对具有风噪的音频进行直接降噪处理的方式(例如采用滤波器将风噪过滤掉),效果并不是很理想,导致后续的异常声判定准确度较低。而本发明实施例的风噪处理方法通过四个不同朝向的麦克风来采集音频,并通过音频间的相关性值来判定哪些音频是没有风噪的,四个方向上只要有一个方向没有风噪,那么就能将对应的音频作为异常声音检测音频来用于异常声音检测,使得后续的异常声判定更为准确有效。
35.实施例2:一种基于无人机异常声音检测的风噪处理方法,与实施例1的不同之处在于,当l8中全部音频均有风噪时,并不是直接返回l3进行音频的重新采集,而是先进行以下步骤l81.获取与所述最大相关性值对应的两音频,且将对应音频记作音频d1和音频f1。本实施例中与最大相关性值(即3号相关性值)对应的两音频是第一音频和第四音频,将第一音频记作音频d1,将第四音频记作音频f1。
36.l82.获取当前检测点的背景声音频h。每一检测点的背景声音频h在正式巡检之前已经确定好了,这里只需要调用即可。
37.l83.将音频d1与背景声音频h做差得到音频d2,将音频f1与背景声音频h做差得到音频f2。本步骤相当于将音频d1和音频f1中的背景噪音剔除。
38.l84.提取音频d2和音频f2上的音频点数据以形成对应的音频数据组d2和音频数据组f2。以音频d2为例,从0秒开始以一定的时间间隔采集音频d2上的音频点数据,全部音频点数据按采集顺序排列形成音频数据组d2。音频f2以同样的方式处理,得到相应的音频数据组f2。
39.l85.计算音频数据组d2和音频数据组f2的相关性值。相关性值的具体计算方式直接采用现有技术。
40.l86.当所述相关性值小于第三预设阈值时,判定音频d1与音频f1均无异常声音,返回l2;当所述相关性值大于等于第三预设阈值时,判定音频d1与音频f1均有异常声音,第一计数器计数值加一,且将第一计数器计数值与预设计数阈值一进行比对,当第一计数器计数值小于预设计数阈值一时,返回l3;当第一计数器计数值等于预设计数阈值一时,返回l2。
41.当音频d1和音频f1中的背景噪音剔除后,音频d2和音频f2中就只剩下风噪或只剩下风噪和异常声音。当计算得到的相关性值小于第三预设阈值时,表示音频d2和音频f2只具有风噪,并没有异常声音,所以不需要再重复步骤l3至l10来得到异常声音检测音频而是直接返回步骤l2,前进至下一检测点进行音频采集。其中,第三预设阈值可根据历史实验数据人为设定。
42.当计算得到的相关性值大于等于第三预设阈值时,表示音频d1与音频f1不仅具有风噪还具有异常声音,所以需要返回步骤l3以重新采集音频。另外,并不是一直采集不到无风噪的异常声音检测音频就一直重复下去。本实施例设置了第一计数器,每循环一次,第一计数器的计数值就加一,当第一计数器的计数值达到预设计数阈值一(例如10)时,表示无风噪的异常声音检测音频采集了10次都没有成功,那就不继续采集下去了,直接返回l2以前进至下一检测点。而当前检测点就直接采用有风噪的音频来进行异常声检测了,并通过现有的降噪方式(例如通过滤波器对风噪进行滤波降噪)来对音频进行处理。
43.本发明实施例的风噪处理方法能够在四个音频都有风噪的前提下,对其是否具有异常声音进行判定,如果没有异常声则可直接前进至下一检测点进行音频采集,省去了当前检测点的无用的音频采集循环次数;如果有异常声则对音频采集的循环次数进行了限定,避免因一直采集不到无风噪的异常声音检测音频而一直停滞不前。
44.实施例3:一种基于无人机异常声音检测的风噪处理方法,与实施例2的不同之处在于,当l86中音频d1与音频f1均有异常声音且计数器计数值等于预设计数阈值一时,并不是直接返回l2,而是先进行以下步骤l861获取一个预估异常声音检测音频m。先假定一个没有风噪的异常声音检测音频作为预估异常声音检测音频m。
45.l862将音频d1与预估异常声音检测音频m做差得到音频d3,将音频f1与预估异常声音检测音频m做差得到音频f3。
46.l863提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3。以音频d3为例,从0秒开始以一定的时间间隔采集音频d3上的音频点数据,全部音频点数据按采集顺序排列形成音频数据组d3。音频f3以同样的方式处理,得到相应的音频数据组f3。
47.l864计算音频数据组d3和音频数据组f3的相关性值。相关性值的具体计算方式直接采用现有技术。
48.l865当所述相关性值小于第四预设阈值时,将所述预估异常声音检测音频m作为异常声音检测音频,并返回l2;当所述相关性值大于等于第四预设阈值时,第二计数器计数值加一,且将第二计数器计数值与预设计数阈值二进行比对,当第二计数器计数值小于预设计数阈值二时,返回l861;当第二计数器计数值等于预设计数阈值二时,返回l2。
49.在实际的无风噪的异常声音检测音频与预估异常声音检测音频m完全相同的情况
下,音频d3和音频f3就都只剩下风噪了。那么它们对应的音频数据组d3和音频数据组f3计算得到的相关性值就会非常小。当音频数据组d3和音频数据组f3计算得到的相关性值小于第四预设阈值时,表示音频d3和音频f3主要为风噪了,那么预估异常声音检测音频m与无风噪的异常声音检测音频就非常接近了。此时,可以预估异常声音检测音频m作为异常声音检测音频,并返回l2。
50.当相关性值大于等于第四预设阈值时,表示当前的预估异常声音检测音频m与无风噪的异常声音检测音频是有一定差别的,需要返回l861以重新获取一个新的预估异常声音检测音频m,并重复步骤l862至l865。其中,第四预设阈值可根据历史实验数据人为设定。另外,并不是一直获取不到合适的预估异常声音检测音频m就一直重复下去。本实施例设置了第二计数器,每循环一次,第二计数器的计数值就加一,当第二计数器的计数值达到预设计数阈值二(例如50)时,表示预估异常声音检测音频m获取了50次都不合适,那就不继续重复下去了,直接返回l2以前进至下一检测点。而当前检测点就直接采用有风噪的音频来进行异常声检测了,并通过现有的降噪方式(例如通过滤波器对风噪进行滤波降噪)来对音频进行处理。
51.其中,l861获取预估异常声音检测音频m具体包括以下步骤s1.判定是否为第一次获取预估异常声音检测音频m,是则进入s2,否则进入s3。
52.s2.在第一次获取预估异常声音检测音频m时,先获取上一检测点的异常声音检测音频,当所述异常声音检测音频的检测结果为具有异常声音时,将所述异常声音检测音频作为预估异常声音检测音频m;当所述异常声音检测音频的检测结果为不具有异常声音时,预估异常声音检测音频m获取失败,返回l2。
53.由于每个检测点是很近的,所以当前检测点的无风噪的异常声音检测音频应该是与上一检测点的无风噪的异常声音检测音频是相近的。现在有两种情况:第一种情况是,上一检测点的异常声音检测音频是没有异常声音(相当于只有背景噪音),而当前检测点的异常声音检测音频因为是有异常声音,所以不能直接将上一检测点的异常声音检测音频作为预估异常声音检测音频m,即步骤l861的预估异常声音检测音频m获取失败,所以还是直接返回l2。第二种情况是,上一检测点的异常声音检测音频是有异常声音的(相当于是背景噪音和异常声音组合),而当前检测点的异常声音检测音频也是背景噪音和异常声音组合,且两个检测点的背景噪音几乎是相同的,而两个检测点的异常声音也是近似的,所以可以将上一检测点的异常声音检测音频作为预估异常声音检测音频m。
54.s3.在不是第一次获取预估异常声音检测音频m时,将当前预估异常声音检测音频m与当前背景声音频h做差得到异常声音频g1,并对异常声音频g1进行调整以得到异常声音频g2,并将异常声音频g2与当前背景声音频h相加得到预估异常声音检测音频m。其中,异常声音频g1的调整方式为对其幅值整体加上或减去一定的值。
55.本发明实施例的风噪处理方法能够在四个音频都有风噪且都有异常声音的前提下,先获取一个预估异常声音检测音频m,通过不断调整预估异常声音检测音频m的方式得到一个合适的无风噪的异常声音检测音频,相比通过滤波器降噪方式得到的异常声音检测音频,本实施例方式得到的异常声音检测音频更好,能够更加准确有效地进行异常音判定,进而使得声学成像仪最终确定的异常声音声源位置更准确。另外,本实施例还对预估异常声音检测音频m的调整次数进行了限定,避免因预估异常声音检测音频m一直不能调整成为
合适的异常声音检测音频而一直停滞不前。
56.实施例4:如图1所示,一种基于无人机异常声音检测的风噪处理系统,用于实施例3的风噪处理方法,包括音频采集模块,第一音频数据组形成模块,第一相关性值计算模块,最大相关性值获取模块,最大相关性值第一判定模块,最大相关性值第二判定模块,音频a音频b确定模块,音频c确定模块,第二相关性值计算模块和相关性值比对模块。
57.音频采集模块用于在当前检测点上通过至少四个麦克风采集无人机不同方向上的音频。第一音频数据组形成模块用于提取音频上的音频点数据以形成对应的音频数据组。第一相关性值计算模块用于计算全部音频数据组两两之间的相关性值。最大相关性值获取模块用于获取相关性值中的最大相关性值。
58.最大相关性值第一判定模块用于将最大相关性值与第一预设阈值进行比对,当所述最大相关性值大于等于第一预设阈值时,判定与所述最大相关性值对应的两音频均没有风噪,选择两音频中的任意一音频作为异常声音检测音频。
59.最大相关性值第二判定模块用于将所述最大相关性值与第二预设阈值进行比对,当所述最大相关性值大于等于第二预设阈值时,判定与所述最大相关性值对应的两音频中有一个音频没有风噪;当所述最大相关性值小于第二预设阈值时,判定全部音频均有风噪。
60.音频a音频b确定模块用于在最大相关性值第二判定模块判定与所述最大相关性值对应的两音频中有一个音频没有风噪时,将对应的两音频记作音频a和音频b。
61.音频c确定模块用于在最大相关性值第二判定模块判定与所述最大相关性值对应的两音频中有一个音频没有风噪时,获取相关性值中的最小相关性值,并获取与所述最小相关性值对应的两音频中的任意一个音频,且将对应音频记作音频c。
62.第二相关性值计算模块用于计算音频c与音频a对应的两音频数据组的相关性值以及音频c与音频b对应的两音频数据组的相关性值。
63.相关性值比对模块用于当音频c与音频a对应得到的相关性值大于音频c与音频b对应得到的相关性值时,判定音频a没有风噪,将音频a作为异常声音检测音频;当音频c与音频a对应得到的相关性值小于音频c与音频b对应得到的相关性值时,判定音频b没有风噪,将音频b作为异常声音检测音频。
64.本发明实施例的风噪处理系统通过四个不同朝向的麦克风来采集音频,并通过音频间的相关性值来判定哪些音频是没有风噪的,四个方向上只要有一个方向没有风噪,那么就能将对应的音频作为异常声音检测音频来用于异常声音检测,使得后续的异常声判定更为准确有效。
65.进一步的,本实施例的风噪处理系统还包括音频d1音频f1获取模块,背景声音频h获取模块,音频d2音频f2计算模块,第二音频数据组形成模块,第三相关性值计算模块,相关性值判定模块一,第一计数器和第一计数值判定模块。
66.音频d1音频f1获取模块用于在最大相关性值第二判定模块判定全部音频均有风噪时,获取与所述最大相关性值对应的两音频,且将对应音频记作音频d1和音频f1。背景声音频h获取模块用于获取当前检测点的背景声音频h。
67.音频d2音频f2计算模块用于将音频d1与背景声音频h做差得到音频d2,将音频f1与背景声音频h做差得到音频f2。第二音频数据组形成模块用于提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3。第三相关性值计算模块用于计算
音频数据组d2和音频数据组f2的相关性值。
68.相关性值判定模块一用于当所述相关性值小于第三预设阈值时,判定音频d1与音频f1均无异常声音;当所述相关性值大于等于第三预设阈值时,判定音频d1与音频f1均有异常声音。第一计数器用于当所述相关性值判定模块一判定音频d1与音频f1均有异常声音,第一计数器计数值加一。第一计数值判定模块用于当所述第一计数器计数值加一时,将所述第一计数器计数值与预设计数阈值一进行比对。
69.本发明实施例的风噪处理系统能够在四个音频都有风噪的前提下,对其是否具有异常声音进行判定,如果没有异常声则可直接前进至下一检测点进行音频采集,省去了当前检测点的无用的音频采集循环次数;如果有异常声则对音频采集的循环次数进行了限定,避免因一直采集不到无风噪的异常声音检测音频而一直停滞不前。
70.进一步的,本发明实施例的风噪处理系统还包括预估异常声音检测音频m获取模块,音频d3音频f3计算模块,第三音频数据组形成模块,第四相关性值计算模块,相关性值判定模块二,第二计数器和第二计数值判定模块。
71.预估异常声音检测音频m获取模块用于当音频d1与音频f1均有异常声音且第一计数器计数值等于预设计数阈值一时,获取一个预估异常声音检测音频m。
72.其中,预估异常声音检测音频m获取模块包括音频m获取次数判定单元,音频m第一获取单元和音频m第二获取单元。音频m获取次数判定单元用于判定是否为第一次获取所述预估异常声音检测音频m。音频m第一获取单元用于当所述音频m获取次数判定单元判定所述预估异常声音检测音频m是第一次获取时,获取上一检测点的异常声音检测音频,且当所述异常声音检测音频的检测结果为具有异常声音时,将所述异常声音检测音频作为预估异常声音检测音频m;当所述异常声音检测音频的检测结果为不具有异常声音时,预估异常声音检测音频m获取失败。音频m第二获取单元用于当所述音频m获取次数判定单元判定所述预估异常声音检测音频m不是第一次获取时,将上一次的预估异常声音检测音频m与当前背景声音频h做差得到异常声音频g1,并对异常声音频g1进行调整以得到异常声音频g2,并将异常声音频g2与当前背景声音频h相加得到当前的预估异常声音检测音频m。而音频m第二获取单元包括用于对异常声音频g1的幅值进行调整的异常声音频g1调整子单元。
73.音频d3音频f3计算模块用于将音频d1与预估异常声音检测音频m做差得到音频d3,将音频f1与预估异常声音检测音频m做差得到音频f3。第三音频数据组形成模块用于提取音频d3和音频f3上的音频点数据以形成对应的音频数据组d3和音频数据组f3。第四相关性值计算模块用于计算音频数据组d3和音频数据组f3的相关性值。
74.相关性值判定模块二用于当所述相关性值小于第四预设阈值时,将所述预估异常声音检测音频m作为异常声音检测音频。第二计数器用于当所述相关性值大于等于第四预设阈值时,第二计数器计数值加一。第二计数值判定模块用于当所述第二计数器计数值加一时,将所述第二计数器计数值与预设计数阈值二进行比对。
75.本发明实施例的风噪处理系统能够在四个音频都有风噪且都有异常声音的前提下,先获取一个预估异常声音检测音频m,通过不断调整预估异常声音检测音频m的方式得到一个合适的无风噪的异常声音检测音频,相比通过滤波器降噪方式得到的异常声音检测音频,本实施例方式得到的异常声音检测音频更好,能够更加准确有效地进行异常音判定,进而使得声学成像仪最终确定的异常声音声源位置更准确。另外,本实施例还对预估异常
声音检测音频m的调整次数进行了限定,避免因预估异常声音检测音频m一直不能调整成为合适的异常声音检测音频而一直停滞不前。
76.上面所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。