技术特征:
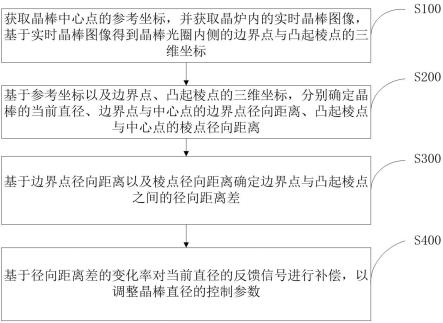
1.一种晶炉双目三维测量补偿方法,其特征在于,所述方法包括:获取晶棒中心点的参考坐标,并获取晶炉内的实时晶棒图像,基于所述实时晶棒图像得到晶棒光圈内侧的边界点与凸起棱点的三维坐标;基于所述参考坐标以及所述边界点、所述凸起棱点的三维坐标,分别确定晶棒的当前直径、所述边界点与所述中心点的边界点径向距离、所述凸起棱点与所述中心点的棱点径向距离;基于所述边界点径向距离以及所述棱点径向距离确定所述边界点与所述凸起棱点之间的径向距离差;基于所述径向距离差的变化率对所述当前直径的反馈信号进行补偿,以调整晶棒直径的控制参数。2.根据权利要求1所述的方法,其特征在于,所述获取晶棒中心点的参考坐标之前,还包括:在晶体生长的引晶阶段,通过双目相机捕捉晶棒光圈的最长轴两端测量点的三维坐标,并基于两端测量点的三维坐标得到所述中心点的所述参考坐标。3.根据权利要求1所述的方法,其特征在于,所述基于所述实时晶棒图像得到晶棒光圈内侧的边界点与凸起棱点的三维坐标包括:基于双目相机之间的空间立体关系,对双目相机拍摄的所述实时晶棒图像中同一测量点的像素坐标进行转换,得到所述边界点、所述凸起棱点的三维坐标。4.根据权利要求3所述的方法,其特征在于,所述双目相机之间的空间立体关系通过点阵型棋盘格标定板对双目相机预先标定获取。5.根据权利要求1所述的方法,其特征在于,所述基于所述参考坐标以及所述边界点、所述凸起棱点的三维坐标,分别确定晶棒的当前直径、所述边界点与所述中心点的边界点径向距离、所述凸起棱点与所述中心点的棱点径向距离包括:将所述参考坐标和所述边界点的三维坐标投影至同一径向平面上,计算得到晶棒的所述当前直径以及所述边界点与所述中心点的所述边界点径向距离;将所述参考坐标和所述凸起棱点的三维坐标投影至同一径向平面上,计算得到所述凸起棱点与所述中心点的所述棱点径向距离。6.根据权利要求1至权利要求5任意一项所述的方法,其特征在于,所述基于所述径向距离差的变化率对所述当前直径的反馈信号进行补偿包括:基于当前的所述径向距离差以及对应的历史数据,确定所述径向距离差的变化率;基于所述径向距离差的变化率以及预设的比例常数,得到晶棒的直径补偿系数;通过所述直径补偿系数对所述当前直径的反馈信号进行补偿。7.根据权利要求1至权利要求5任意一项所述的方法,其特征在于,所述基于所述径向距离差的变化率对所述当前直径的反馈信号进行补偿之后,还包括:基于补偿之后所述当前直径的反馈信号以及测量得到的液口距的反馈信号,调整晶体生长的控制参数,其中,基于双目相机捕捉的所述实时晶棒图像中所述边界点以及晶炉导流筒下沿测量点的三维坐标,得到所述液口距。8.一种晶炉双目三维测量补偿装置,其特征在于,所述装置包括:获取模块,用于获取晶棒中心点的参考坐标,并获取晶炉内的实时晶棒图像,基于所述
实时晶棒图像得到晶棒光圈内侧的边界点与凸起棱点的三维坐标;测距模块,用于基于所述参考坐标以及所述边界点、所述凸起棱点的三维坐标,分别确定晶棒的当前直径、所述边界点与所述中心点的边界点径向距离、所述凸起棱点与所述中心点的棱点径向距离;预测模块,用于基于所述边界点径向距离以及所述棱点径向距离确定所述边界点与所述凸起棱点之间的径向距离差;补偿模块,用于基于所述径向距离差的变化率对所述当前直径的反馈信号进行补偿,以调整晶棒直径的控制参数。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至权利要求7中任一项所述的方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求7中任一项所述的方法的步骤。
技术总结
本申请涉及一种晶炉双目三维测量补偿方法、装置、计算机设备和存储介质。方法包括:获取晶棒中心点的参考坐标,并获取晶炉内的实时晶棒图像,基于实时晶棒图像得到晶棒光圈内侧的边界点与凸起棱点的三维坐标;基于参考坐标以及边界点、凸起棱点的三维坐标,分别确定晶棒的当前直径、边界点与中心点的边界点径向距离、凸起棱点与中心点的棱点径向距离;基于边界点径向距离以及棱点径向距离确定边界点与凸起棱点之间的径向距离差;基于径向距离差的变化率对当前直径的反馈信号进行补偿,以调整晶棒直径的控制参数。采用本方法能够准确地测量晶棒直径以及预测直径未来变化,并对直径控制补偿,保证直径控制的及时性和准确性。保证直径控制的及时性和准确性。保证直径控制的及时性和准确性。
技术研发人员:曹建伟 傅林坚 朱亮 高宇 葛旭 周铮超
受保护的技术使用者:浙江晶盛机电股份有限公司
技术研发日:2022.11.18
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。