1.本发明涉及取水隧洞清洗设备技术领域,具体地说是一种去除核电取水隧洞海生附着物的方法。
背景技术:
2.在核电取水隧洞使用的过程中,长期下来会有很多海生物的附着,海生物的附着会是隧洞单位截面取水量变小,影响整个核电厂的工作。附着在隧洞内的海生物一般由贝壳类组成,其壳及分泌物具有一定的坚硬程度。取水隧洞内壁的材质为钢筋混凝土,隧洞截面一般为圆形或马蹄形。去除附着的海生物,不但要考虑工作和清洗效率,还要注意混凝土内壁的保护。
3.目前,去除核电取水隧洞海生附着物采用安装在机架上的行走轮组件使整个设备在隧洞内正常行走,机架起安装固定刀具安装座和履带轮的作用,刀具组件通过液压缸来控制刀具高度,使之与隧道内壁接触,通过液压缸带动锯齿状的刀具来回移动,将附着在隧道内壁的海生物铲下来,刀具组件均匀分布在机架上,保证隧道截面清理范围全覆盖。该清理方法虽然能够代替人工进行隧洞中海生物的清理,在清理效率上带来了显著的变化。但隧洞清洗存在死角,隧洞清洗不彻底,尤其是截面为马蹄形的隧洞,不能根据隧洞的实际情况对附着的海生物进行清理,清洗效果差。
4.现有技术的隧洞海生物清理机器不能根据隧洞截面的形状进行无死角的定向清洗,隧洞清洗不彻底,不但清洗效率差、工作效率低,而且还容易损坏隧洞内壁的钢筋混凝土。
技术实现要素:
5.本发明的目的是针对现有技术的不足而提供的一种去除核电取水隧洞海生附着物的方法,采用磨石轮为海生附着物的清理刀具与螺旋桨为清理机器的动力装置和摄像头、激光扫描仪为影像装置,将其集成在钢结构的框架上为水下清理机器,开启螺旋桨动力装置,控制机器前进速度,使机器向前至目标井方向运动,通过影像装置得到海生物附着位置,到达海生物附着点后打开液压脚固定清理机器,并开启电动磨石轮去除海生物,该机器能根据隧洞的实际情况对附着的海生物进行定向清理,大大提升了工作效率和清洗效果,可根据隧洞截面的形状进行无死角的定向清洗,做到精准到位,有的放矢,不损伤隧洞内壁的钢筋混凝土,结构简单,使用方便,清洗效率高,具有一定的应用前景。
6.实现本发明目的具体技术方案是:一种去除核电取水隧洞海生附着物的方法,其特点是该方法采用电动磨石轮为去除海生附着物的清理刀具与螺旋桨为清理机器水下行走的动力装置,以及摄像头和激光扫描仪为影像装置,将其集成在钢结构的框架上为水下清理机器,机器从中间井放入隧洞,开启螺旋桨动力装置控制机器前进速度,使机器向前至目标井方向运动,通过影像装置得到海生物附着位置,达到位置后打开可伸缩液压脚固定机器,并开启电动动磨石轮去除贝类海生物附着,所述水下清理机器采用控制芯片控制电
动磨石轮、螺旋桨、摄像头和激光扫描仪,实现定向去除取水隧洞的海生附着物。
7.所述控制芯片采用控制线缆或无线通讯与设置在取水隧洞外部的计算机连接,实现水下清理机器定向去除取水隧洞的海生附着物。
8.所述可伸缩液压脚上设有球形车轮,打开可伸缩液压脚由球形车轮将水下清理机器固定在隧洞内进行海生附着物的定向去除。
9.所述电动磨石轮由移动架设置在机架上为可伸缩的电动磨石轮。
10.本发明与现有技术相比具有根据隧洞的实际情况对附着的海生物进行无死角的定向清理,做到精准到位,有的放矢,不损伤隧洞内壁的钢筋混凝土,结构简单,使用方便,清洗效率高,制作成本低,大大提升了工作效率,具有一定的应用前景。
附图说明
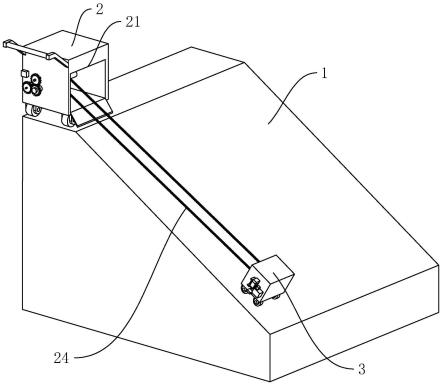
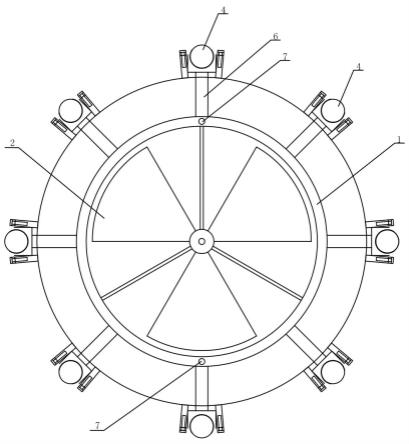
11.图1为采用本发明设计的清理机器结构示意图;图2为图1的1-1截面图;图3为图1的2-2截面图;图4为图1的3-3截面图。
具体实施方式
12.本发明采用电动磨石轮为去除海生附着物的清理刀具与螺旋桨为清理机器水下行走的动力装置,以及摄像头和激光扫描仪为影像装置,将其集成在钢结构的框架上为水下清理机器,机器从中间井放入隧洞,开启螺旋桨动力装置控制机器前进速度,使机器向前至目标井方向运动,通过影像装置得到海生物附着位置,达到位置后打开可伸缩液压脚固定机器,并开启电动磨石轮去除贝类海生物附着,所述水下清理机器采用控制线缆或无线通讯与设置在取水隧洞外部的控制器连接,实现水下清理机器定向去除取水隧洞的海生附着物;所述控制芯片采用控制线缆或无线通讯与设置在取水隧洞外部的计算机连接,实现水下清理机器定向去除取水隧洞的海生附着物;所述可伸缩液压脚上设有球形车轮,打开可伸缩液压脚由球形车轮将水下清理机器固定在隧洞内进行海生附着物的定向去除;所述电动磨石轮由移动架设置在机架上为可伸缩的电动磨石轮。
13.本发明按下述步骤去除核电取水隧洞海生附着物清理工作的:1)将机器连接电线及信号线,并与取水隧洞外部的计算机连接;2)将机器从中间井放入隧洞;3)开启动力装置,机器向前至目标井方向运动到指定位置,机器可以按需求前进或者后退;4)到达指定地点,张开可伸缩液压脚固定机器位置,将电动磨石轮移动至隧道壁位置;5)开启电动磨石轮,将贝类海生物以及分泌硬化物去除;6)清楚完毕后收回电动磨石轮和可伸缩液压脚,移动机器至指定地点回收。
14.以下通过采用本发明设计的去除核电取水隧洞海生附着物清理机器的具体实施例对本发明作进一步的说明:实施例1
参阅图1~图4,本发明由设置在机架1上的发动机2、螺旋桨叶3、球形车轮4、电动磨石轮5和可伸缩液压脚6组成,所述机架1为筒形的框架钢结构,筒形框架上设有两排环状设置的电动磨石轮5,其两端设有数个环状设置的球形车轮4;所述发动机2设置在主机箱21内,且由主机支架22以轴向设置在机架1的筒形框架内;所述螺旋桨叶3设置在伸出主机箱21外的发动机转轴上为螺旋桨动力装置,驱动清理机在取水隧洞里行走;所述电动磨石轮5由移动架51设置在机架1上,电动磨石轮5与移动架51为滑动连接,移动架51与机架1为固定连接;所述球形车轮4设置在可伸缩液压脚6上,且与可伸缩液压脚6为活动连接;所述可伸缩液压脚6固定设置在机架1的框架上;所述发动机2、电动磨石轮5和可伸缩液压脚6由线缆与设置在外部的计算机连接,打开可伸缩液压脚6由球形车轮4将清理机固定在隧洞内,开启电动磨石轮5打磨隧洞内壁附着的海生物。
15.所述机架1前端的框架上设有激光扫描仪8和数个摄像头3组成的影像装置,所述摄像头3和激光扫描仪8由线缆与设置外部的控制器连接。
16.本发明是这样工作的:清理机由控制芯片通过线缆或无线通讯与设置外部的计算机连接,将清理机其从中间井放入隧洞,开启螺旋桨动力装置控制机器前进速度,使机器向前至目标井方向运动,通过影像装置来得出海生物附着位置,达到位置后打开可伸缩液压脚6由球形车轮4将清理机固定在隧洞内,并开启电动磨石轮5去除附着在隧洞内壁的海生物。清理工作结束后收回电动磨石轮5和可伸缩液压脚6,启动螺旋桨动力装置,移动机器至指定地点回收。
17.以上只是对本发明作进一步的说明,并非用以限制本专利,凡为本发明等效实施,均应包含于本专利的权利要求范围之内。
技术特征:
1.一种去除核电取水隧洞海生附着物的方法,其特征在于,该方法采用电动磨石轮为去除海生附着物的清理刀具与螺旋桨为清理机器水下行走的动力装置,以及摄像头和激光扫描仪为影像装置,将其集成在钢结构的框架上为水下清理机器,机器从中间井放入隧洞,开启螺旋桨动力装置控制机器前进速度,使机器向前至目标井方向运动,通过影像装置得到海生物附着位置,达到位置后打开可伸缩液压脚固定机器,并开启电动磨石轮去除贝类海生物附着,所述水下清理机器采用控制芯片控制电动磨石轮、螺旋桨、摄像头和激光扫描仪,实现定向去除取水隧洞的海生附着物。2.根据权利要求1所述的去除核电取水隧洞海生附着物的方法,其特征在于,所述控制芯片采用控制线缆或无线通讯与设置在取水隧洞外部的计算机连接,实现水下清理机器定向去除取水隧洞的海生附着物。3.根据权利要求1所述的去除核电取水隧洞海生附着物的方法,其特征在于,所述可伸缩液压脚上设有球形车轮,打开可伸缩液压脚由球形车轮将水下清理机器固定在隧洞内进行海生附着物的定向去除。4.根据权利要求1所述的去除核电取水隧洞海生附着物的方法,其特征在于,所述电动磨石轮由移动架设置在机架上为可伸缩的电动磨石轮。
技术总结
本发明公开了一种去除核电取水隧洞海生附着物的方法,其特点是该方法采用磨石轮为去除海生附着物的清理刀具与螺旋桨为清理机器水下行走的动力装置和摄像头、激光扫描仪为影像装置,将其集成在钢结构的框架上为水下清理机器,机器从中间井放入隧洞,开启螺旋桨动力装置控制机器前进速度,使机器向前至目标井方向运动,通过影像装置得到海生物附着位置,达到位置后打开可伸缩液压脚固定机器,并开启电动动磨石轮去除贝类海生物附着,所述水下清理机器采用控制芯片与设置在取水隧洞外部的计算机连接,实现水下清理机器定向去除取水隧洞的海生附着物。本发明与现有技术相比具有结构简单,使用方便,清洗效率高,制作成本低,具有一定的应用前景。一定的应用前景。一定的应用前景。
技术研发人员:金国龙 陈懿 胡世南 李昀 周竝 康靖宇 李鸿桥 张永来
受保护的技术使用者:中船第九设计研究院工程有限公司
技术研发日:2022.11.11
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。