1.本实用新型涉及交通运输领域,具体涉及一种具有安全预警功能的空轨铁路车辆系统。
背景技术:
2.传统铁路通常采用单一铁路或多条平行铁路,每条铁路有助于在相同或相反方向上运行列车。这种系统通常采用被动转向机制,该机制依靠车辆车轮和每条铁路的一条或多条轨道之间的机械相互作用来控制车辆。
3.在传统的铁路中,轨道-车轮界面是一个锥形几何形状的钢轮,骑在一个具有不对称圆形工字梁轮廓的钢轨上。成型车轮和成型轨道之间的复杂动力学使得一个细车轮能够停留在一个细的轨道上。车轮和轨道之间的摩擦会导致严重磨损,从而导致频繁的维修和/或更换关键部件。
4.悬挂式空轨造价低,占用空间少,运输安全性好,没有脱轨的危险,在城市交通及旅游交通中有广阔运用空间。现有的空轨铁路采用的转向架一般为平直的刚性体,并在两侧采用带有转向的滚轮进行驱动,使悬挂在转向架底部的车辆行进。但是转向架下方悬挂的车辆重量大,长期使用容易导致车辆与转向架之间的连接件变形,变形较大时还存在安全隐患。
技术实现要素:
5.基于以上问题,本实用新型提供一种具有安全预警功能的空轨铁路车辆系统,通过测距机构实时监测车体顶部与转向架底部之间的距离,并将该距离数据传递至控制器,当监测到的距离数据超过预设的报警阈值时,控制器控制报警器产生报警提示音,提醒工作人员进行及时检修或采取应急措施。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.一种具有安全预警功能的空轨铁路车辆系统,包括架设于地面上方的轨道,轨道通过多个垂直安装于地面的支撑杆支撑固定,支撑杆沿轨道延伸方向间隔布置;轨道包括位于底部的两个对向设置的l形支撑轨,两个l形支撑轨之间设置有转向架,转向架上设置有驱动转向架在轨道内移动的驱动机构,转向架的两侧靠近两端头位置设置有可供转向架在l形支撑轨上移动的滚轮;转向架的底部设置有连接杆,连接杆远端由两个l形支撑轨之间的间隙穿出至轨道下方,位于轨道下方的连接杆端头连接有车体;车体顶部设置有用于测量车体顶部到转向架底部之间间距的测距机构,车体内还设置有控制器和报警器,滚轮、测距机构和报警器均与控制器通讯连接。
8.进一步地,测距机构为红外测距仪,包括设置于车体顶部的红外发射器和设置于转向架底部的红外接收器,红外发射器与红外接收器对向设置,红外接收器与控制器通讯连接。
9.进一步地,轨道包括直线段和转弯段,转弯段为弧形结构,转向架的长度与轨道转
弯段的水平曲率相适应。
10.进一步地,驱动机构包括两个设置于转向架顶部的转盘,每个转盘的转轴垂直于转向架的上表面;每个转盘上通过支架安装有蜗杆,蜗杆的转轴位于水平方向,蜗杆由伺服电机驱动旋转,伺服电机与控制器电性连接;轨道内设置有沿轨道延伸方向设置的齿条,蜗杆与齿条啮合。
11.进一步地,齿条与蜗杆啮合处为弧形结构,啮合处的弧形结构的圆心位于蜗杆的转轴上。
12.进一步地,控制器还包括gps定位模块,控制器通过通信模块与远程控制终端通信连接,远程控制终端包括中央处理器、储存器和显示器。
13.进一步地,支撑杆顶部的轨道数量为两条,两条轨道平行设置于支撑杆的两侧,每条轨道上分别通过转向架连接有多个运行方向相反的车体。
14.与现有技术相比,本实用新型的有益效果是:
15.1.本实用新型通过测距机构实时监测车体顶部与转向架底部之间的距离,并将该距离数据传递至控制器,当监测到的距离数据超过预设的报警阈值时,控制器控制报警器产生报警提示音,提醒工作人员进行及时检修或采取应急措施。
16.2.驱动机构采用蜗杆与齿条啮合的方式,蜗杆由伺服电机驱动旋转,伺服电机由控制器控制正反转;该结构既可以作为驱动机构,也可以作为制动机构;伺服电机旋转则会带动转向架移动;伺服电机不旋转转向架则不会移动;需要停车时只需逐渐减小伺服电机转速,直至伺服电机不旋转。
附图说明
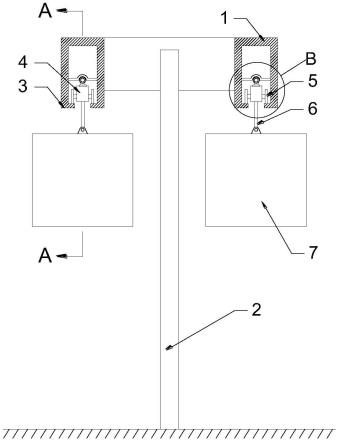
17.图1为实施例中具有安全预警功能的空轨铁路车辆系统的结构示意图;
18.图2为图1中剖面a-a的结构示意图;
19.图3为图1中剖面局部b的放大示意图;
20.图4为实施例转盘、蜗杆及伺服电机的连接示意图;
21.图5为实施例中转向架在l形支撑轨上的安装示意图;
22.图6为实施例中轨道的转弯段的立体结构图;
23.图7为实施例中控制器、报警器、测距机构及远程控制终端的结构框图;
24.其中:1、轨道;2、支撑杆;3、l形支撑轨;4、转向架;5、滚轮;6、连接杆;7、车体;8、控制器;9、报警器;10、红外发射器;11、红外接收器;12、转盘;13、蜗杆;14、伺服电机;15、齿条;16、gps定位模块;17、通信模块;18、远程控制终端;19、中央处理器;20、储存器;21、显示器。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
26.实施例:
27.参见图1-7,一种具有安全预警功能的空轨铁路车辆系统,包括架设于地面上方的
轨道1,轨道1通过多个垂直安装于地面的支撑杆2支撑固定,支撑杆2沿轨道1延伸方向间隔布置;轨道1包括位于底部的两个对向设置的l形支撑轨3,两个l形支撑轨3之间设置有转向架4,转向架4上设置有驱动转向架4在轨道1内移动的驱动机构,转向架4的两侧靠近两端头位置设置有可供转向架4在l形支撑轨3上移动的滚轮5;转向架4的底部设置有连接杆6,连接杆6远端由两个l形支撑轨3之间的间隙穿出至轨道1下方,位于轨道1下方的连接杆6端头连接有车体7;车体7顶部设置有用于测量车体7顶部到转向架4底部之间间距的测距机构,车体7内还设置有控制器8和报警器9,滚轮5、测距机构和报警器9均与控制器8通讯连接。
28.在本实施例中,车体7通过连接杆6固定于转向架4的底部,转向架4通过l形支撑轨3安装在悬空的轨道1内;行进过程中,驱动机构提供转向架4行进的动力,转向架4依靠两侧的滚轮5在l形支撑轨3上运动,从而使车体7沿着轨道1延伸方向移动。在转向架4带动车体7行进过程中,测距机构实时测量车体7顶部和转向架4底部之间的距离,并将该距离数值传递至控制器8,通过预先在控制器8内设置报警器9的报警阈值,当车体7顶部与转向架4底部之间的距离数值超过设定的阈值时,表示连接车体7与转向架4之间的连接杆6或连接构件产生了变形,车体7有掉落的风险;此时控制器8控制报警器9发出报警声,提醒工作人员及时检修或采取应急措施。
29.本实施例中的测距机构为红外测距仪,包括设置于车体7顶部的红外发射器10和设置于转向架4底部的红外接收器11,红外发射器10与所述红外接收器11对向设置,红外接收器11与控制器8通讯连接。红外发射器10向红外接收器11发射一个红外线脉冲,红外接收器11接收红外线脉冲并记录从发射到接收所用的时间,根据红外线在空气中的传播速度即可计算出车体7与转向架4之间的距离。然后将该距离数据传递至控制器8,进行车体7运行的安全预警监控。
30.轨道1包括直线段和转弯段,转弯段为弧形结构,转向架4的长度与轨道1转弯段的水平曲率相适应。轨道1在转弯段内为水平弯曲的轨道1,实现车体7的行进导向;同时,转向架4的长度与转弯段的水平曲率相适应,能够保证转向架4在转弯段能够正常穿过,且转向架4不会因为长度过长而卡在转弯段内,保证车体7的正常行驶。
31.驱动机构包括两个设置于转向架4顶部的转盘12,每个转盘12的转轴垂直于转向架4的上表面;每个转盘12上通过支架安装有蜗杆13,蜗杆13的转轴位于水平方向,蜗杆13由伺服电机14驱动旋转,所述伺服电机14与控制器8电性连接;轨道1内设置有沿轨道1延伸方向设置的齿条15,蜗杆13与齿条15啮合。本实施例中的两个驱动机构是采用蜗杆13配合齿条15进行驱动转向架4的行进,当伺服电机14转动带动蜗杆13旋转,蜗杆13与齿条15啮合,齿条15产生一个反作用力推动蜗杆13移动,从而带动转向架4在轨道1内移动。而且,实施例中采用的是两组蜗杆13,进行前后驱动,在经过转弯段时,齿条15与蜗杆13的啮合会使齿条15给蜗杆13一个切线方向上的作用力,蜗杆13会产生轻微的转动,此时转盘12通过旋转调整蜗杆13的角度,保证蜗杆13与齿条15啮合驱动。而且蜗杆13与齿条15啮合后,只有伺服电机14旋转才会使转向架4移动行进;当伺服电机14不旋转时,齿条15会阻碍蜗杆13移动,此时蜗杆13和齿条15即可作为驱动机构,也可以作为制动机构;需要停车时,只需逐渐减慢伺服电机14转速直至不再旋转即可停车制动。
32.齿条15与蜗杆13啮合处为弧形结构,啮合处的弧形结构的圆心位于蜗杆13的转轴上。本实施例中齿条15为弧形结构,与啮合处的蜗杆13形成同心圆弧,尤其是在转弯段可以
对蜗杆13产生一定的导向作用,限制蜗杆13在转盘12上的随意转动,保证能够驱动转向架4能够在l形支撑轨3上正常运行。
33.控制器8还包括gps定位模块16,控制器8通过通信模块17与远程控制终端18通信连接,远程控制终端18包括中央处理器19、储存器20和显示器21。当同一个轨道1上存在多个车体7时,多个车体7上的控制器8中的gps定位模块16通过控制器8的通信模块17将车的位置信息实时传递至远程控制终端18,远程控制终端18接收多个车体7传递的位置信息,计算并通过显示器21显示各个车体7的位置和行进速度,进行统一调度,便于及时处理应急事件。
34.支撑杆2顶部的轨道1数量为两条,两条轨道1平行设置于支撑杆2的两侧,每条轨道1上分别通过转向架4连接有多个运行方向相反的车体7;通过两条并行的轨道1设置,实现双轨反向运行。
35.如上即为本实用新型的实施例。上述实施例以及实施例中的具体参数仅是为了清楚表述实用新型验证过程,并非用以限制本实用新型的专利保护范围,本实用新型的专利保护范围仍然以其权利要求书为准,凡是运用本实用新型的说明书及附图内容所作的等同结构变化,同理均应包含在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。