图像处理装置和图像处理方法
[技术领域]
[0001]
本发明涉及一种图像处理技术。
[
背景技术:
]
[0002]
现场的建筑机械通过无线网络连接,在移动、回转等车辆主体大幅移动的情况下,伴随着建筑机械的动作,建筑机械所附带的天线的朝向、位置会发生变化。由此,无线基站与建筑机械之间的电波传播环境会发生变化,线路容量瞬间减少,从而有可能产生数据的缺失。数据的缺失会降低监视器图像的视觉辨认性,降低远程操作时的作业效率。
[0003]
因此,提出了如下技术:在进行建筑机械的远程操作时,能够针对通信环境的变化进行具有鲁棒性的通信,削减视频的紊乱,提高操作时的作业效率(例如,参照专利文献1)。具体而言,根据由视频编码器压缩视频数据而生成的第一数据、以及相应于在建筑机械中被驱动的致动器而设定的校正数据生成率,来生成第二数据。“校正数据生成率”是校正数据相对于第一数据的比例。“校正数据”是为了使用第一数据进行校正而生成的数据。而且,将第一数据和第二数据合并而成的第三数据从建筑机械发送至操纵装置,通过该操纵装置的监视器在将第三数据解码后进行显示。
[0004]
[现有技术文献]
[0005]
专利文献
[0006]
专利文献1:日本特开2018-021395号公报
[
技术实现要素:
]
[0007]
发明要解决的课题
[0008]
但是,在液压挖掘机等作业机械的作业附件快速动作的情况等、表示作业机械及其环境状况的动态图像的帧间的差分变大的状况下,由视频编码器压缩后的动态图像数据的量会临时增加。因此,即使在未产生线路容量的降低的情况下,压缩后的动态图像数据量也会过多,有可能产生向远程操作装置的图像输出装置输出的动态图像的不连续等。
[0009]
因此,本发明的目的在于提供一种即使在动态图像的帧间的差分变大的状况下也能够提高向远程操作装置的图像输出装置输出的动态图像的连续性的装置等。
[0010]
用于解决课题的手段
[0011]
本发明的图像处理装置,其具备:状态检测元件,其用于检测远程操作装置对作业机械的远程操作方式或所述作业机械的动作方式;图像预测元件,其基于由所述状态检测元件检测到的所述远程操作装置对所述作业机械的远程操作方式或所述作业机械的动作方式,预测表示由实机拍摄装置拍摄的所述作业机械及其环境的拍摄图像的拍摄图像数据量是否超过阈值;以及,图像压缩元件,其以由所述图像预测元件预测为所述拍摄图像数据量超过所述阈值为必要条件,去除所述拍摄图像中的除第一指定图像区域以外的第二指定图像区域的超过指定频率的高频分量。
[0012]
根据该结构的图像处理装置,在鉴于远程操作装置对作业机械的远程操作方式或
该作业机械的动作方式的检测结果而预测为拍摄图像数据量超过阈值的情况下,能够去除拍摄图像的除第一指定图像区域以外的第二指定图像区域的超过指定频率的高频分量。由此,能够减少拍摄图像数据量,并且能够提高向远程操作装置的图像输出装置输出的图像的第一指定图像区域的帧间的连续性、进而提高操作者的视觉辨认性。
[0013]
[附图的简单说明]
[0014]
图1是关于远程操作辅助系统和图像处理装置的结构的说明图。
[0015]
图2是关于远程操作装置的结构的说明图。
[0016]
图3是关于作业机械的结构的说明图。
[0017]
图4是关于远程操作辅助装置的第一功能的说明图。
[0018]
图5是关于远程操作辅助装置的第二功能的说明图。
[0019]
图6a是关于拍摄图像数据量的压缩的说明图。
[0020]
图6b是关于拍摄图像数据量的压缩的说明图。
[0021]
图7是关于环境图像的显示方式的说明图。
[0022]
图8a是关于拍摄图像数据量减少前的时间变化方式的说明图。
[0023]
图8b是关于拍摄图像数据量减少后的时间变化方式的说明图。
[0024]
图9是关于第一和第二指定图像区域的指定方式的说明图。
[0025]
图10是关于第一和第二指定图像区域的指定方式的说明图。
[0026]
图11是关于在拍摄图像中包含指定对象物体的情况下的第一和第二指定图像区域的指定方式的说明图。
[具体实施方式]
[0027]
(远程操作辅助系统的结构)
[0028]
图1所示的远程操作辅助系统由远程操作辅助服务器10和用于对作业机械40进行远程操作的远程操作装置20构成。远程操作辅助服务器10、远程操作装置20和作业机械40构成为能够相互进行网络通信。远程操作辅助服务器10和远程操作装置20的相互通信网络与远程操作辅助服务器10和作业机械40的相互通信网络可以相同,也可以不同。
[0029]
另外,远程操作是指操作者不搭乘作业机械40而从与作业机械40分开的位置对作业机械40进行操作的概念。
[0030]
另外,操作者是指对远程操作装置20进行操作来进行作业机械40的操纵的人的概念。
[0031]
(远程操作辅助服务器的结构)
[0032]
远程操作辅助服务器10具备数据库102、第一辅助处理元件121和第二辅助处理元件122。数据库102存储保持拍摄图像数据等。数据库102也可以由与远程操作辅助服务器10分离的数据库服务器构成。各辅助处理元件由运算处理装置(单核处理器或多核处理器、或构成其的处理器内核)构成,从存储器等存储装置读取必要的数据和软件,并以该数据为对象执行依照该软件的后述的运算处理。
[0033]
(远程操作装置的结构)
[0034]
远程操作装置20具备远程控制装置200、远程输入界面210和远程输出界面220。远程控制装置200由运算处理装置(单核处理器或多核处理器、或构成其的处理器内核)构成,
从存储器等存储装置读取必要的数据和软件,并以该数据为对象执行依照该软件的运算处理。
[0035]
远程输入界面210具备远程操作机构211。远程输出界面220具备图像输出装置221和远程无线通信设备224。
[0036]
远程操作机构211包括行驶用操作装置、回转用操作装置、动臂用操作装置、斗杆用操作装置和铲斗用操作装置。各操作装置具有接受转动操作的操作杆。行驶用操作装置的操作杆(行驶杆)能够被操作以使作业机械40的下部移动体410动作。行驶杆也可以兼作行驶踏板。例如,也可以设置有固定于行驶杆的基部或下端部的行驶踏板。回转用操作装置的操作杆(回转杆)能够被操作以使构成作业机械40的回转机构430的液压式回转马达动作。动臂用操作装置的操作杆(动臂杆)能够被操作以使作业机械40的动臂缸442动作。斗杆用操作装置的操作杆(斗杆杆)能够被操作以使作业机械40的斗杆缸444动作。铲斗用操作装置的操作杆(铲斗杆)能够被操作以使作业机械40的铲斗缸446动作。
[0037]
例如,如图2所示,构成远程操作机构211的各操作杆配置在用于供操作者就座的座椅st的周围。座椅st是带扶手的高背椅那样的形态,但也可以是操作者能够就座的任意形态的就座部,例如没有头枕的低背椅那样的形态、或者没有靠背的座椅那样的形态等。
[0038]
在座椅st的前方,左右横向排列地配置有与左右履带对应的左右一对行驶杆2110。一个操作杆也可以兼作多个操作杆。例如,图2所示的设置于座椅st的左侧框架的前方的左侧操作杆2111也可以在沿前后方向操作的情况下作为斗杆杆发挥作用,并且在沿左右方向操作的情况下作为回转杆发挥作用。同样地,图2所示的设置于座椅st的右侧框架的前方的右侧操作杆2112也可以在沿前后方向操作的情况下作为动臂杆发挥作用,并且在沿左右方向操作的情况下作为铲斗杆发挥作用。杆模式也可以根据操作者的操作指示而任意地变更。
[0039]
例如,如图2所示,图像输出装置221由分别配置在座椅st的前方、左斜前方和右斜前方的具有大致矩形形状的画面的中央图像输出装置2210、左侧图像输出装置2211和右侧图像输出装置2212构成。中央图像输出装置2210、左侧图像输出装置2211和右侧图像输出装置2212各自的画面(图像显示区域)的形状和尺寸可以相同,也可以不同。
[0040]
如图2所示,以使中央图像输出装置2210的画面和左侧图像输出装置2211的画面呈倾斜角度θ1(例如,120
°
≤θ1≤150
°
)的方式,左侧图像输出装置2211的右边缘与中央图像输出装置2210的左边缘相邻。如图2所示,以使中央图像输出装置2210的画面和右侧图像输出装置2212的画面呈倾斜角度θ2(例如,120
°
≤θ2≤150
°
)的方式,右侧图像输出装置2212的左边缘与中央图像输出装置2210的右边缘相邻。该倾斜角度θ1和θ2可以相同,也可以不同。
[0041]
中央图像输出装置2210、左侧图像输出装置2211和右侧图像输出装置2212各自的画面可以相对于铅垂方向平行,也可以相对于铅垂方向倾斜。也可以是中央图像输出装置2210、左侧图像输出装置2211和右侧图像输出装置2212中的至少一个图像输出装置由被分割为多个的图像输出装置构成。例如,也可以是中央图像输出装置2210由具有大致矩形形状的画面的上下相邻的一对图像输出装置构成。
[0042]
(作业机械的结构)
[0043]
作业机械40具备实机控制装置400、实机输入界面41、实机输出界面42和作业机构
440。实机控制装置400具备图像处理装置30。图像处理装置30具备状态检测元件31、图像预测元件32和图像压缩元件34。实机控制装置400和图像处理装置30的构成元件分别由运算处理装置(单核处理器或多核处理器、或构成其的处理器内核)构成,从存储器等存储装置读取必要的数据和软件,并以该数据为对象执行依照该软件的运算处理。
[0044]
作业机械40例如是履带式挖掘机(建筑机械),如图3所示,具备履带式的下部移动体410和经由回转机构430能够回转地搭载于下部移动体410的上部回转体420。在上部回转体420的前方左侧部设置有操纵室424(驾驶室)。在上部回转体420的前方中央部设置有作业机构440。
[0045]
实机输入界面41具备实机操作机构411、实机拍摄装置412和实机定位装置414。实机操作机构411在配置于操纵室424内部的座椅的周围具备与远程操作机构211同样地配置的多个操作杆。在操纵室424中设置有驱动机构或机器人,该驱动机构或机器人接收与远程操作杆的操作方式相应的信号,并基于该接收信号使实机操作杆动作。实机拍摄装置412例如设置于操纵室424的内部,透过前车窗和左右一对侧车窗对包含作业机构440的至少一部分的环境进行拍摄。也可以省略前车窗和侧车窗中的一部分或全部。实机定位装置414由gps和根据需要的陀螺仪传感器等构成。
[0046]
实机输出界面42具备实机无线通信设备422。
[0047]
如图3所示,作为作业机构的作业机构440具备:动臂441,其可起伏地安装于上部回转体420;斗杆443,其可转动地连结于动臂441的前端;以及铲斗445,其可转动地连结于斗杆443的前端。在作业机构440上安装有由可伸缩的液压缸构成的动臂缸442、斗杆缸444和铲斗缸446。
[0048]
动臂缸442介于该动臂441与上部回转体420之间,通过接受工作油的供给而伸缩以使动臂441在起伏方向上转动。斗杆缸444介于该斗杆443与该动臂441之间,通过接受工作油的供给而伸缩以使斗杆443相对于动臂441绕水平轴转动。铲斗缸446介于该铲斗445与该斗杆443之间,通过接受工作油的供给而伸缩以使铲斗445相对于斗杆443绕水平轴转动。
[0049]
(功能)
[0050]
使用图4所示的流程图对上述结构的远程操作辅助系统的基本功能进行说明。在该流程图中,“c
●”
这样的框用于简化记载,意味着数据的发送和/或接收,并意味着以该数据的发送和/或接收为条件来执行分支方向的处理的条件分支。
[0051]
在远程操作装置20中,判定操作者有无通过远程输入界面210进行指定操作(图4/step210)。“指定操作”例如是操作者为了指定打算进行远程操作的作业机械40而在远程输入界面210中进行的点击等操作。在该判定结果为否定的情况下(图4/step210
…
no),一系列处理结束。另一方面,在该判定结果为肯定的情况下(图4/step210
…
yes),通过远程无线通信设备224向远程操作辅助服务器10发送环境确认请求(图4/step212)。
[0052]
在远程操作辅助服务器10中,在接收到环境确认请求的情况下,通过第一辅助处理元件121将该环境确认请求发送至相应的作业机械40(图4/c10)。
[0053]
在作业机械40中,在通过实机无线通信设备422接收到环境确认请求的情况下(图4/c40),实机控制装置400通过实机拍摄装置412获取拍摄图像(图4/step410)。在此,由图像处理装置30执行将在后面详细叙述的图像处理(图4/step300)。实机控制装置400通过实机无线通信设备422将实施了该图像处理的拍摄图像数据发送至远程操作辅助服务器10
(图4/step412)。
[0054]
在远程操作辅助服务器10中,在通过第一辅助处理元件121接收到拍摄图像数据的情况下(图4/c11),通过第二辅助处理元件122将与拍摄图像对应的环境图像数据发送至远程操作装置20(图4/step110)。环境图像数据除了拍摄图像数据本身之外,还是基于拍摄图像而生成的表示模拟性环境图像的图像数据。在图像处理装置30由远程操作辅助服务器10构成的情况下,也可以通过由图像处理装置30对拍摄图像数据进行图像处理来生成环境图像数据。
[0055]
在远程操作装置20中,在通过远程无线通信设备224接收到环境图像数据的情况下(图4/c21),通过远程控制装置200将与环境图像数据对应的环境图像输出到图像输出装置221中(图4/step214)。
[0056]
由此,例如,如图7所示,将通过由划定操纵室424的右窗框q1、上窗框q2、左窗框q3和下窗框q4构成的窗框在操纵室424的前方映入了作为作业机构440的一部分的动臂441、斗杆443和(作为铲斗445的作业对象的)瓦砾或砂土的山的环境图像输出到图像输出装置221中。
[0057]
在远程操作装置20中,通过远程控制装置200识别远程操作机构211的操作方式(图4/step216),并且通过远程无线通信设备224,将与该操作方式对应的远程操作指令发送至远程操作辅助服务器10(图4/step218)。
[0058]
在远程操作辅助服务器10中,在通过第二辅助处理元件122接收到该远程操作指令的情况下,通过第一辅助处理元件121将该远程操作指令发送至作业机械40(图4/c12)。
[0059]
在作业机械40中,在通过实机无线通信设备422接收到操作指令的情况下(图4/c41),通过实机控制装置400控制作业机构440等的动作(图4/step414)。例如,执行通过铲斗445铲起作业机械40前方的土并在使上部回转体420回转后使土从铲斗445掉落的作业。
[0060]
使用图5所示的流程图对上述结构的图像处理装置30的图像处理功能(参照图4/step300)的详细情况进行说明。
[0061]
在图像处理装置30中,通过状态检测元件31基于搭载于作业机械40的各种传感器的输出信号来识别或检测该作业机械40的动作方式(图5/step302)。也可以代之以通过状态检测元件31基于与远程操作装置20的通信来识别远程操作机构211的操作方式(参照图4/step216)。
[0062]
通过图像预测元件32基于作业机械40的动作方式来判定使用帧间预测对所述拍摄图像进行编码时的数据量是否超过阈值(图5/step304)。对于作为输入图像的一帧的拍摄图像,基于作业机械40的动作方式预测作为预测图像的第二延迟时间τ2后的其他帧的拍摄图像,并且判定该输入图像与该预测图像的差分被编码时的数据量是否超过阈值。第二延迟时间τ2是直至作业机械40的动作方式反映到表示该作业机械40及其环境状况的拍摄图像中的延迟时间。
[0063]
也可以是,对于作为输入图像的一帧的拍摄图像,基于作业机械40的动作方式预测作为预测图像的第一延迟时间τ1后的其他帧的拍摄图像,并且判定该输入图像与该预测图像的差分被编码时的数据量是否超过阈值。第一延迟时间τ1是直至远程操作装置20对作业机械40的远程操作方式反映到表示该作业机械40及其环境状况的拍摄图像中的延迟时间。
[0064]
例如,在上部回转体420相对于下部移动体410回转的情况下、在筛掉由铲斗445(作业部)捞起的砂土时该铲斗445小幅移动的情况下、以及在作业机械40通过下部移动体410的动作而移动时上部回转体420大幅振动的情况下,输入图像与预测图像的差分变大。在这些情况下,例如,如图8a所示,在从时刻t1到时刻t2的期间内,该差分被编码时的数据量(参见实线)有时会超过阈值(参见虚线)。拍摄图像数据量会在时刻t1超过阈值这一情况能够基于第二延迟时间τ2(或第一延迟时间τ1)之前的时刻下的作业机械40的动作方式(或远程操作机构211的操作方式)来预测。
[0065]
阈值也可以基于作业机械40、远程操作辅助服务器10和远程操作装置20之间的拍摄图像数据的通信速度的高低、通信速度的稳定性和/或通信费用来自适应地或者预先设定。
[0066]
在该判定结果为否定的情况下(图5/step304
…
no),通过图像压缩元件34,如通常那样压缩拍摄图像数据(图5/step308)。
[0067]
具体而言,如图6a所示,对由实机拍摄装置412拍摄的拍摄图像进行参数变更处理和利用帧间预测的编码处理。
[0068]
参数变更处理是使拍摄图像数据量减少的处理。例如,进行降低分辨率(与相邻像素的平均化处理)、提高亮度(使全部像素均匀地接近白色)、降低亮度(使全部像素均匀地接近黑色)、降低对比度这样的处理。
[0069]
帧间预测是针对输入图像制作预测图像并对该输入图像与该预测图像的差分进行编码的处理。
[0070]
另一方面,在该判定结果为肯定的情况下(图5/step304
…
yes),通过图像压缩元件34加工并压缩该拍摄图像数据,以使拍摄图像数据量成为阈值以下(图5/step306)。
[0071]
具体而言,如图6b所示,对由实机拍摄装置412拍摄的拍摄图像进行参数变更处理、高频分量去除处理和利用帧间预测的编码处理。作为参数变更处理,可以通过相邻像素的平均化处理来降低分辨率(例如,分辨率从3840*2160变更为1920*1080)。作为参数变更处理,也可以将全部像素的亮度一律增加指定值。通过使全部像素均匀地接近白色一种颜色,容易进行压缩。作为参数变更处理,也可以将全部像素的亮度一律降低指定值。通过使全部像素均匀地接近黑色一种颜色,容易进行压缩。作为参数变更处理,还可以通过对全部像素的对比度一律乘以规定值1/x来降低对比度。参数变更处理和利用帧间预测的编码处理与图6a所示的如通常那样的压缩处理相同。
[0072]
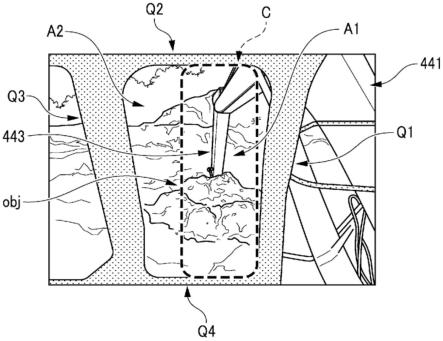
在进行高频分量去除处理时,首先,基于由状态检测元件31检测到的作业机械40的动作方式,通过图像压缩元件34指定构成拍摄图像的一部分的第一指定图像区域。例如,在使作业机构440动作而通过铲斗445将瓦砾等从某一地方铲起并放置于其他地方这样的动作方式的情况下,如图9所示,将由上下部分分别通过上窗框q2和下窗框q4划定的大致矩形形状的边界线c包围的、包含作业机构440的至少一部分和瓦砾或砂土的山obj的图像区域指定为第一指定图像区域a1。拍摄图像数据量相对于阈值的超过量越大,拍摄图像中的第一指定区域a1的占有面积被设定得越小。
[0073]
另外,在除了使作业机构440动作以外、还一边使上部回转体420相对于下部移动体410左右交替地回转、一边通过铲斗445将瓦砾等从某一地方捞起并放置于其他地方这样的动作方式的情况下,如图10所示,也可以将由全部通过窗框整体划定的边界线c包围的、
包含作业机构440的至少一部分和瓦砾或砂土的山obj的比图9宽的图像区域指定为第一指定图像区域a1。
[0074]
并且,在使上部回转体420相对于下部移动体410向左方向回转这样的动作方式的情况下,除了窗框的内侧的至少一部分图像区域之外,也可以将左窗框q3的左侧的图像区域指定为第一指定图像区域a1。同样地,在使上部回转体420相对于下部移动体410向右方向回转这样的动作方式的情况下,除了窗框的内侧的至少一部分图像区域之外,也可以将右窗框q4的右侧的图像区域指定为第一指定图像区域a1。
[0075]
如图11所示,在拍摄图像中在左窗框q3的左侧等处抽取出卡车或作业者等指定对象物体obj2的情况下,也可以将包围该指定对象物体obj2的边界线c2的内侧的图像区域指定为第一指定区域a11。在图11中,与图9同样地,将由上下部分分别通过上窗框q2和下窗框q4划定的大致矩形形状的边界线c包围的、包含作业机构440的至少一部分和瓦砾或砂土的山obj1的图像区域指定为第一指定图像区域a1。
[0076]
然后,去除拍摄图像的除第一指定图像区域a1以外的第二指定图像区域a2的超过指定频率的高频分量。此时,例如,使用以下方法:进行dst(离散余弦变换)、即将图像分割为8
×
8像素的区域并在各分割区域中进行空间频率变换后,去除信息量较少的高频分量。由此,在远程操作装置20中将第一指定图像区域a1中的对比度清晰而第二指定图像区域a2中的对比度不清晰(模糊)的环境图像输出到图像输出装置221中(参照图4/step214、图9、图10和图11)。
[0077]
(效果)
[0078]
根据构成该结构的远程操作辅助系统的图像处理装置30,在鉴于作业机械40的动作方式的检测结果而预测为拍摄图像数据量超过阈值的情况下,能够去除拍摄图像的除第一指定图像区域a1以外的第二指定图像区域a2的超过指定频率的高频分量(参照图5/step304
…
yes
→
step306、图9、图10和图11)。由此,例如,如图8b所示,能够减少拍摄图像数据量,以使在从时刻t1到时刻t2的期间内该数据量(参照实线)也成为阈值以下。并且,能够提高向远程操作装置20的图像输出装置221输出的环境图像的第一指定图像区域a1的帧间的连续性、进而提高操作者的视觉辨认性。
[0079]
优选地,在本发明的图像处理装置中,上述图像预测元件针对与作为输入图像的上述拍摄图像数据对应的一帧的拍摄图像,基于由上述状态检测元件检测到的上述远程操作装置对上述作业机械的远程操作方式或上述作业机械的动作方式,预测直至上述远程操作装置对上述作业机械的远程操作方式反映到表示该作业机械及其环境状况的拍摄图像中的第一延迟时间或者直至上述作业机械的动作方式反映到表示该作业机械及其环境状况的拍摄图像中的第二延迟时间后的拍摄图像作为预测图像,并且,预测上述输入图像与该预测图像的差分被编码时的数据量是否超过上述阈值。
[0080]
根据该结构的图像处理装置,通过考虑直至远程操作装置对作业机械的远程操作方式反映到该作业机械的动作方式中的第一延迟时间和/或直至作业机械的动作方式反映到表示该作业机械及其环境状况的拍摄图像中的第二延迟时间,能够预测该输入图像与该预测图像的差分被编码时的数据量是否超过阈值。然后,在预测为该被编码时的数据量超过阈值的情况下,如上所述,去除拍摄图像的除第一指定图像区域以外的第二指定图像区域的超过指定频率的高频分量。由此,能够减少拍摄图像数据量,并且能够提高向远程操作
装置的图像输出装置输出的图像的第一指定图像区域的帧间的连续性、进而提高操作者的视觉辨认性。
[0081]
优选地,在本发明的图像处理装置中,上述图像压缩元件基于由上述状态检测元件检测到的上述远程操作装置对上述作业机械的远程操作方式或上述作业机械的动作方式,指定构成上述拍摄图像的一部分的上述第一指定图像区域。
[0082]
根据该结构的图像处理装置,能够以包含预测为帧间的差分超过阈值、即鉴于远程操作装置对作业机械的远程操作方式或作业机械的动作方式而预测为运动或位移量比较大的物体(例如,作业机械的一部分或者位于作业机械的周围的物体)的方式,在拍摄图像中指定第一指定图像区域。由此,对于操作者而言,向构成远程操作装置的图像输出装置输出的预测为运动或位移量比较大的物体的视觉辨认性的提高、进而远程操作装置基于该视觉辨认结果对作业机械的远程操作变得容易。
[0083]
优选地,在本发明的图像处理装置中,上述图像压缩元件在通过配置于上述作业机械的乘员室内部的上述实机拍摄装置拍摄的、通过划定上述乘员室的窗框来表示上述乘员室的外部状况的上述拍摄图像中,将由上述窗框至少部分地划定的图像区域指定为上述第一指定图像区域。
[0084]
根据该结构的图像处理装置,鉴于在向构成远程操作装置的图像输出装置输出的拍摄图像中,操作者的注意力集中于由划定乘员室的窗框至少部分地划定的图像区域的可能性较高,从该操作者的操作的顺利性的观点出发,能够适当地提高向远程操作装置的图像输出装置输出的图像的连续性。
[0085]
[符号说明]
[0086]
10:远程操作辅助服务器;20:远程操作装置;30:图像处理装置;31:状态检测元件;32:图像预测元件;34:图像压缩元件;40:作业机械;102:数据库;121:第一辅助处理元件;122:第二辅助处理元件;200:远程控制装置;210:远程输入界面;211:远程操作机构;220:远程输出界面;221:图像输出装置;224:远程无线通信设备;400:实机控制装置;41:实机输入界面;42:实机输出界面;424:操纵室(驾驶室);440:作业机构;445:铲斗(作业部);412:实机拍摄装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。