技术特征:
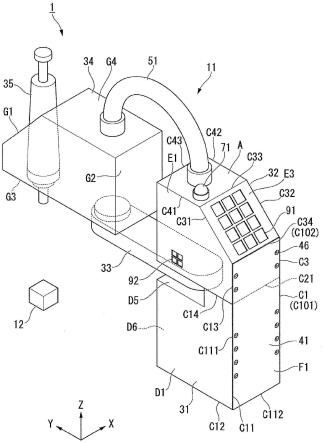
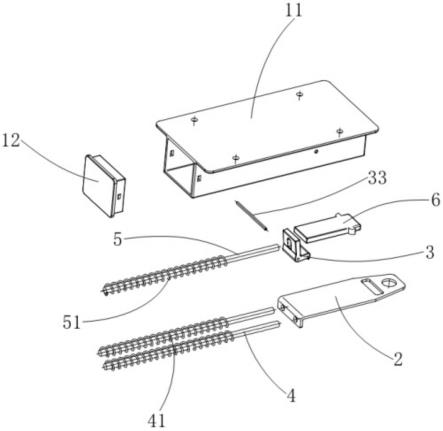
1.一种水平多关节型机器人,其特征在于,具备:基台,具有突起;第一壳体,固定于所述基台的所述突起;第一臂,以绕第一旋转轴旋转的方式设于所述基台;第二臂,以绕与所述第一旋转轴平行的第二旋转轴旋转的方式设于所述第一臂;第一驱动部,位于所述基台的内部,并驱动所述第一臂;控制基板,位于所述基台的内部,并控制所述第一驱动部;以及电源基板,位于所述第一壳体的内部,并向所述第一驱动部供给电力,所述第一臂的一部分在所述第一旋转轴的轴向上夹在所述基台与所述第一壳体之间。2.一种水平多关节型机器人,其特征在于,具备:基台,具有突起;第一壳体,固定于所述基台的所述突起;第一臂,以绕第一旋转轴旋转的方式设于所述第一壳体;第二臂,以绕与所述第一旋转轴平行的第二旋转轴旋转的方式设于所述第一臂;第一驱动部,位于所述第一壳体的内部,并驱动所述第一臂;控制基板,位于所述基台的内部,并控制所述第一驱动部;以及电源基板,位于所述第一壳体的内部,并向所述第一驱动部供给电力,所述第一臂的一部分在所述第一旋转轴的轴向上夹在所述基台与所述第一壳体之间。3.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述第一驱动部具有电动机和放大器部,所述放大器部具有驱动所述电动机的驱动电路,所述放大器部设于所述电动机,所述电源基板转换从电源供给的电压的电平而向所述放大器部供给。4.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述水平多关节型机器人具备设于所述第一壳体的显示部。5.根据权利要求4所述的水平多关节型机器人,其特征在于,所述显示部位于所述第一壳体的正面。6.根据权利要求4所述的水平多关节型机器人,其特征在于,在从所述第一旋转轴的轴向观察时,所述显示部具有位于所述第一臂的可动区域内的部分。7.根据权利要求4所述的水平多关节型机器人,其特征在于,所述显示部的设于所述第一壳体的位置能够变更。8.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述第一壳体具有开口部。9.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述水平多关节型机器人具备第二驱动部,所述第二驱动部由所述控制基板控制,并驱动所述第二臂。10.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述水平多关节型机器人具备配管,在所述配管的一端部具有与所述第一壳体的上表
面连接的第一连接部,并在所述配管的另一端部具有与所述第二臂的上表面连接的第二连接部,在从与所述第一旋转轴正交的方向观察时,所述第一连接部与所述第二连接部至少部分重叠。11.根据权利要求1或2所述的水平多关节型机器人,其特征在于,所述水平多关节型机器人具备配管,在所述配管的一端部具有与所述第一壳体的上表面连接的第一连接部,并在所述配管的另一端部具有与所述第二臂的上表面连接的第二连接部,所述第一连接部位于所述第一旋转轴的轴上,所述第二连接部位于所述第二旋转轴的轴上,所述第一壳体的所述上表面与所述第二臂的所述上表面平行。
技术总结
本发明提供能够缩小占用空间的水平多关节型机器人。水平多关节型机器人具备:基台,具有突起;第一壳体,固定于所述基台的所述突起;第一臂,以绕第一旋转轴旋转的方式设于所述基台;第二臂,以绕与所述第一旋转轴平行的第二旋转轴旋转的方式设于所述第一臂;第一驱动部,位于所述基台的内部,并驱动所述第一臂;控制基板,位于所述基台的内部,并控制所述第一驱动部;以及电源基板,位于所述第一壳体的内部,并向所述第一驱动部供给电力,所述第一臂的一部分在所述第一旋转轴的轴向上夹在所述基台与所述第一壳体之间。基台与所述第一壳体之间。基台与所述第一壳体之间。
技术研发人员:关根幸太郎 寺中僚祐
受保护的技术使用者:精工爱普生株式会社
技术研发日:2017.05.10
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。