1.本实用新型属于蛋白质印迹杂交筛选装置技术领域,具体涉及一种智能化程度高、操作便捷的多机协同全自动蛋白印迹杂交筛选系统。
背景技术:
2.蛋白质印迹法(western blot)又称免疫印迹法,它是分子生物学、生物化学和免疫遗传学中常用的一种实验方法。主要包括样品或反应试剂孵育、加液、排液、清洗。而且每个过程操作时间及温控要求等各不相同,操作过程十分繁琐,持续操作时间长,而且大多都是机械性重复操作,只是孵育的液体和温度在不断变换,花费实验人员大量的时间和精力,费时费力,而且人工操作手法个体化差异,甚至可能导致实验结果不精确或结果不可复制。因此,有许多公司或个人针对该实验流程,实用新型了不同结构形式的全自动蛋白质印迹杂交仪,能基本实现蛋白质印迹实验的全过程。但是如何实现全自动高通量筛选、100%复现教科书经典实验步骤、多位置温度精确控制,并且使液体残留更少、孵育效果更好,进一步提升作业效率,加快科学发现的效率,这是一个亟待解决的行业难题。
技术实现要素:
3.本实用新型目的在于提供一种多机协同全自动蛋白印迹杂交筛选系统。
4.为实现上述目的,本实用新型提供的技术方案是:一种多机协同全自动蛋白印迹杂交筛选系统,包括多自由度协作机器人组件、移液组件、驱控一体化温控摇床组件、多温度储液槽组、样品孵育盒和人机交互控制系统;
5.所述多自由度协作机器人组件包括一操作台,该操作台上固定设置一底板,一多自由度协作机器人固定于所述底板上;所述操作台的上方设有多个第一相机;所述多自由度协作机器人的末端固定设置有第二相机;
6.所述移液组件包括一驱控一体的移液枪,该移液枪可拆卸设置于所述多自由度协作机器人的末端,所述底板上对应所述移液枪设置有枪头盒、枪头回收桶;
7.所述多温度储液槽组包括封闭液储液槽、多通道一抗液储液槽、回收一体槽、二抗液储液槽、清洗液储液槽、用于回收封闭液、二抗液和清洗液的液体回收槽和用于回收二抗液的液体回收槽;所述封闭液储液槽、多通道一抗液储液槽、二抗液储液槽和清洗液储液槽均设有温度控制系统;
8.所述驱控一体化温控摇床组件包括第一减速电机、电机座、温控摇板和控制板;所述的电机座固定设置在底板上,在电机座的中部固定设置有第一减速电机,第一减速电机的输出轴与温控摇板的中部固定连接;在电机座的底部还固定设置有控制板;
9.样品孵育盒固定于所述底板上;
10.所述多自由度协作机器人与人机交互控制系统信号连接。
11.优选的技术方案为:所述的枪头盒和枪头回收桶可拆卸设置在底板上。
12.优选的技术方案为:所述封闭液储液槽、多通道一抗液储液槽、回收一体槽、二抗
液储液槽、清洗液储液槽、用于回收封闭液、二抗液和清洗液的液体回收槽和用于回收二抗液的液体回收槽可拆卸设置在底板上。
附图说明
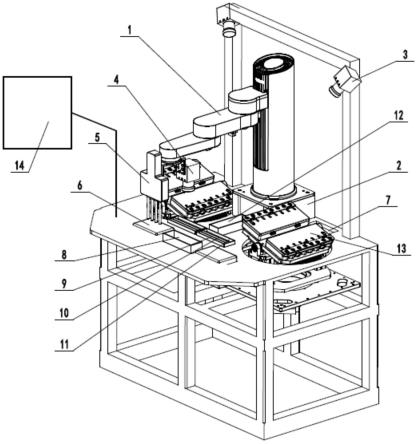
13.图1是本实用新型的结构示意图。
14.以上附图中:1、多自由度协作机器人;2、底板;3、第一相机;4、第二相机;5、驱控一体的移液枪;6、枪头盒;7、枪头回收桶;8、封闭液储液槽;9、多通道一抗液储液槽;10、回收一体槽;11、二抗液储液槽;12、用于回收封闭液、二抗液和清洗液的液体回收槽;13、样品孵育槽;14、人机交互控制系统。
15.由于上述技术方案运用,本实用新型与现有技术相比具有的优点是:
16.1、本实用新型的流速差充分提高孵育效率,得出更好的实验结果。
17.2、本实用新型可以提高珍贵试剂(一抗液)的回收率。
具体实施方式
18.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
19.参见图1所示,须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
20.如图1所示,一种多机协同全自动蛋白印迹杂交筛选糸统,包括:多自由度轻型协作机器人1(至少3自由度)及视觉组件、移液组件、驱控一体化温控摇床组件、多温度储液槽组、样品孵育盒13、人机交互控制系统14。
21.所述的多自由度轻型协作机器人组件包括多自由度协作机器人1及与多自由度轻型协作机器人底座固定连接的底板2;在底板的上方还固定设置有第一相机3,优选的设置方式为:前后左右各匹配设置一个,方便全视角观测实验系统。第一相机的视角可以观测到整个系统,在机器人的末端固定设置有第二相机4,其特征在于第二相机4可以俯瞰底板上方、机械臂末端法兰盘下方的所有组件,第二相机4可以在机械臂的带动下自由运动。
22.所述的移液组件包括可拆卸设置在多自由度协作机器人末端的驱控一体的移液枪5和固定设置在底板上的可快速拆装的枪头盒6及枪头回收桶7组成。
23.使用方法:上述机械臂配合移液单元在软件控制下,从底板指定位置的安装枪头后抽吸液体至摇板上的样品孵育盒内,并在指定时间从样品孵育盒内抽走液体至底板上的指定位置并退出枪头。
24.所述的多支移液枪本体中的任意一支均可由第三直线电机独立调节上下位置;通过感应器控制启停位置,更好的吸干液体;多支移液枪中的任意一支均可由第四直线电机调节左右位置,这样可以拓展样品槽应用范围。所述的枪头盒和枪头回收桶可拆卸设置在
底板上。
25.所述的多温度储液槽组包括封闭液储液槽8(以下简称a)、多通道一抗液储液9(以下简称b)、回收一体槽10、二抗液储液槽11(以下简称c)、清洗液储液槽(以下简称d)、用于回收封闭液、二抗液和清洗液的液体回收槽12。所述的独立的a、b、c、d槽、acd液体回收槽和b液体回收槽均可快速拆卸设置在底板上;所述的abc槽通过温控系统可以长期保持4℃恒温;d槽可以通过温控系统长期保持25℃恒温;
26.所述的驱控一体化温控摇床组件包括第一减速电机、电机座、温控摇板和控制板,其特征在于所述的电机座固定设置在底板上,在电机座的中部固定设置有第一减速电机,第一减速电机的输出轴与温控摇板的中部固定连接;在电机座的底部还固定设置有控制板。
27.使用方法:(1)可通过控制板和外置系统设定转速、时间,并使其在任意位置精准停靠,配合移液单元精确移液;(2)在acd三种液体孵育时保持室温,在b液孵育时保持4℃恒温。
28.底板上设置有可快速拆卸的样品孵育盒13,该样品孵育盒13的横截面为五边形,有两个直角,槽体优选设置为五个小内槽,在停止时振荡时可与底盘一起在任意位置停靠,可以使液体聚集在孵育槽一侧的尖端底部位置,便于洗液和抽吸;能够使液体被完全吸干,无残留。关键特征:槽组材料设计为疏水性强的材料(如聚四氟乙烯、pp、pla等材料),减少液体的附着。其特征在于所述的槽体内还匹配设置有拦网,可以更好的将样品固定,并使得蛋白胶条与液体流速不一致,从而使其与液体充分结合。(1)流速差充分提高孵育效率,得出更好的实验结果;(2)疏水性使液体与蛋白胶条样品充分脱离,减少液体附着后对实验条件的干扰;(3)提高珍贵试剂(一抗液)的回收率。)
29.人机交互控制系统14功能:在软件上对应的每个盘子窗口独立设置分开控制,可联网使用户在手机上实时了解运行状态。
30.使用说明:具体设置命令驱动机械臂流程如下:
31.1、抽取a液(4ml)(封闭液储液槽8内储存的液体)
‑‑
移动至盘子位置
‑‑
下降加注a液
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置恒温、定时)
‑‑
摇板停止后下降机械臂抽干a液
‑‑
上升并移动到回收位置
‑‑
排出a液。
32.2、抽取d液(4ml)(清洗液储液槽内储存的液体)
‑‑
移动至盘子位置
‑‑
下降加注d液
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置定时)
‑‑
摇板停止后下降机械臂抽干d液
‑‑
上升并移动到回收位置
‑‑
排出d液4。循环5-10次。
33.3、抽取b液(3ml,从独立的b1-b40液位置)(多通道一抗液储液9储存的液体)
‑‑
移动至盘子位置
‑‑
下降加注b液
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置恒温、定时)
‑‑
摇板停止后下降机械臂抽干b液
‑‑
上升并移动到回收位置b1-b40
‑‑
排出b液。
34.4、抽取d液(4ml)
‑‑
移动至盘子位置
‑‑
下降加注d液(10-20ml)
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置定时)
‑‑
摇板停止后下降机械臂抽干d液
‑‑
上升并移动到回收位置
‑‑
排出d液。循环5-10次。
35.5、抽取c液(4ml)(二抗液储液槽11内储存的液体)
‑‑
移动至盘子位置
‑‑
下降加注c液
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置定时)
‑‑
摇板停止后下降机械臂抽干c液
‑‑
上升并移动到回收位置
‑‑
排出c液。
36.6、抽取d液(4ml)
‑‑
移动至盘子位置
‑‑
下降加注d液
‑‑
上升
‑‑
设置命令启动板子摇晃程序(可设置定时)
‑‑
摇板停止后下降机械臂抽干d液
‑‑
上升并移动到回收位置
‑‑
排出d液,循环5-10次。
37.多自由度轻型协作机器人购自慧灵科技,型号为hitbot zarm 1832,移液器购自深圳市大肯科技有限公司,型号为adp1000。
38.参见图1所示,一种多机协同全自动蛋白印迹杂交筛选系统,包括多自由度协作机器人组件、移液组件、驱控一体化温控摇床组件、多温度储液槽组、样品孵育盒和人机交互控制系统;
39.所述多自由度协作机器人组件包括一操作台,该操作台上固定设置一底板,一多自由度协作机器人固定于所述底板上;所述操作台的上方设有多个第一相机;所述多自由度协作机器人的末端固定设置有第二相机;
40.所述移液组件包括一驱控一体的移液枪,该移液枪可拆卸设置于所述多自由度协作机器人的末端,所述底板上对应所述移液枪设置有枪头盒、枪头回收桶;
41.所述多温度储液槽组包括封闭液储液槽、多通道一抗液储液槽、回收一体槽、二抗液储液槽、清洗液储液槽、用于回收封闭液、二抗液和清洗液的液体回收槽和用于回收二抗液的液体回收槽;所述封闭液储液槽、多通道一抗液储液槽、二抗液储液槽和清洗液储液槽均设有温度控制系统;
42.所述驱控一体化温控摇床组件包括第一减速电机、电机座、温控摇板和控制板;所述的电机座固定设置在底板上,在电机座的中部固定设置有第一减速电机,第一减速电机的输出轴与温控摇板的中部固定连接;在电机座的底部还固定设置有控制板;
43.样品孵育盒固定于所述底板上;
44.所述多自由度协作机器人与人机交互控制系统信号连接。
45.优选的实施方式为:所述的枪头盒和枪头回收桶可拆卸设置在底板上。
46.优选的实施方式为:所述封闭液储液槽、多通道一抗液储液槽、回收一体槽、二抗液储液槽、清洗液储液槽、用于回收封闭液、二抗液和清洗液的液体回收槽和用于回收二抗液的液体回收槽可拆卸设置在底板上。
47.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。