技术特征:
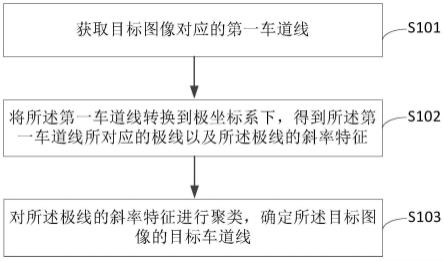
1.一种道路识别方法,其特征在于,包括:获取目标图像对应的第一车道线,所述目标图像是由无人机拍摄得到的多种道路场景中至少一种道路场景的图像;将所述第一车道线转换到极坐标系下,得到所述第一车道线所对应的极线以及所述极线的斜率特征;其中,所述极线用于表示所述第一车道线在霍夫空间对应的点;对所述极线的斜率特征进行聚类,确定所述目标图像的目标车道线,所述目标车道线用于确定道路区域。2.根据权利要求1所述的方法,其特征在于,对所述极线的斜率特征进行聚类,确定所述目标图像的目标车道线,包括:对所述极线的斜率特征进行聚类,确定第二车道线;根据所述第二车道线,确定目标车道线。3.根据权利要求2所述的方法,其特征在于,对所述极线的斜率特征进行聚类,确定第二车道线,包括:若对所述极线的斜率特征进行聚类,得到一组斜率,则确定所述极线对应的第一车道线为第二车道线;若对所述极线的斜率特征进行聚类,得到多组斜率,确定每组斜率的聚类中心,根据每组斜率的聚类中心与无人机航向角,排除与道路方向不同的斜率组,确定第二车道线。4.根据权利要求3所述的方法,其特征在于,所述方法还包括:若排除与道路方向不同的斜率组后存在至少两组斜率,则获取所述至少两组斜率中每组斜率对应的第一车道线数量,并确定第一车道线数量最大的斜率组;若所述数量最大的斜率组对应的第一车道线数量均与其他各斜率组对应第一车道线数量的差值大于预设差值阈值,则排除所述其他各斜率组,确定所述数量最大斜率组对应的第一车道线为第二车道线。5.根据权利要求2-4任一项所述的方法,其特征在于,根据所述第二车道线,确定目标车道线,包括:通过颜色区域面积识别所述第二车道线是实线或虚线;从所述第二车道线所在画面的任一边缘向相邻边缘逐渐扫描,找到所有单向车道区域,所述单向车道区域为含有实线-若干虚线-实线的区域;根据所述单向车道区域,确定目标车道线。6.根据权利要求1-4任一项所述的方法,其特征在于,获取目标图像对应的第一车道线,包括:将所述目标图像转换为灰度图;根据所述灰度图像,确定初始车道线;提取所述目标图像中的车道线掩膜,并基于所述初始车道线以及所述车道线掩膜,确定第一车道线。7.根据权利要求6所述的方法,其特征在于,根据所述灰度图像,确定初始车道线,包括:对所述灰度图进行平滑处理后,通过边缘检测算法获取所述目标图像内的线段;对所述线段进行膨胀处理,得到合并所述线段后的初始车道线。
8.根据权利要求6所述的方法,其特征在于,提取所述目标图像中的车道线掩膜,并基于所述初始车道线以及所述车道线掩膜,确定第一车道线,包括:基于颜色空间hls阈值对所述目标图像进行过滤,提取包括黄色以及白色区域的所述车道线掩膜;基于所述车道线掩膜对所述初始车道线进行提取,获取到所述第一车道线。9.根据权利要求1-4任一项所述的方法,其特征在于,所述方法还包括:获取所述目标图像对应的实际车道线以及所述实际车道线的个数;根据所述目标车道线以及所述目标车道线的个数分别与所述实际车道线以及所述实际车道线的个数进行比对,确定所述道路区域。10.一种道路识别装置,其特征在于,包括:获取模块,用于获取目标图像对应的第一车道线,所述目标图像是由无人机拍摄得到的多种道路场景中至少一种道路场景的图像;处理模块,用于将所述第一车道线转换到极坐标系下,得到所述第一车道线所对应的极线以及所述极线的斜率特征;其中,所述极线用于表示所述第一车道线在霍夫空间对应的点;识别模块,用于对所述极线的斜率特征进行聚类,确定所述目标图像的目标车道线,所述目标车道线用于确定道路区域。11.一种无人机,其特征在于,所述无人机用于执行如权利要求1-9任一项所述的道路识别方法。12.一种电子设备,其特征在于,包括:处理器和存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,使得所述处理器执行如权利要求1至9任一项所述的道路识别方法。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如权利要求1至9任一项所述的道路识别方法。14.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-9任一项所述的道路识别方法。
技术总结
本申请实施例提供一种道路识别方法、装置、无人机、设备及存储介质,该方法包括:获取目标图像对应的第一车道线,所述目标图像是由无人机拍摄得到的多种道路场景中至少一种道路场景的图像;将所述第一车道线转换到极坐标系下,得到所述第一车道线所对应的极线以及所述极线的斜率特征;其中,所述极线用于表示所述第一车道线在霍夫空间对应的点;对所述极线的斜率特征进行聚类,确定所述目标图像的目标车道线,所述目标车道线用于确定道路区域。本申请实施例提供的方法能够克服现有技术中识别道路的应用场景具有局限性,无法准确地识别出道路区域以及完整的路况信息的问题。出道路区域以及完整的路况信息的问题。出道路区域以及完整的路况信息的问题。
技术研发人员:郭昊
受保护的技术使用者:北京远度互联科技有限公司
技术研发日:2022.09.14
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。