技术特征:
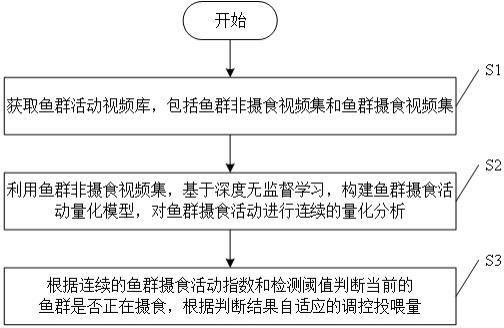
1.一种基于鱼群摄食活动量化的精准投喂方法,其特征在于,所述方法包括:s1,获取鱼群活动视频库,包括鱼群非摄食视频集和鱼群摄食视频集;s2,利用鱼群非摄食视频集,基于深度无监督学习,构建鱼群摄食活动量化模型,对鱼群摄食活动进行连续的量化分析,具体包括:基于外观自编码器网络和运动自编码器网络,构建鱼群摄食活动量化模型,所述外观自编码器网络包括外观编码器模块、注意力模块和外观解码器模块,所述运动自编码器网络包括运动编码器模块、记忆模块和运动解码器模块;利用鱼群非摄食视频集,获取视频样本数据集,所述视频样本数据集为若干时间连续的视频样本;从所述视频样本数据集中提取固定帧数的视频序列,对所述视频序列进行转换,得到对应的灰度图序列和差帧图序列;将所述灰度图序列输入所述外观自编码器网络,将所述差帧图序列输入所述运动自编码器网络,输出重构的灰度图序列和重构的差帧图序列;根据所述灰度图序列和所述重构的灰度图序列,确定外观损失函数;根据所述差帧图序列和所述重构的差帧图序列,确定运动损失函数;根据所述外观损失函数和所述运动损失函数,确定总损失函数;根据所述总损失函数迭代优化所述外观自编码器网络和所述运动自编码器网络中的参数,以对所述鱼群摄食活动量化模型进行训练,得到训练完成的鱼群摄食活动量化模型;采用所述训练完成的鱼群摄食活动量化模型对鱼群摄食视频集中待检测的鱼群摄食视频进行量化,得到连续的鱼群摄食活动指数。2.s3,根据所述连续的鱼群摄食活动指数和检测阈值判断当前的鱼群是否正在摄食,根据判断结果自适应的调控投喂量;所述检测阈值,具体计算如下:采用所述训练完成的鱼群摄食活动量化模型对鱼群非摄食视频集中的视频进行量化,得到非摄食视频对应的鱼群摄食活动指数;根据所述的非摄食视频对应的鱼群摄食活动指数构建阈值学习样本集;根据所述阈值学习样本集,确定检测阈值,所述检测阈值包括:阈值学习样本集的样本中心c、阈值学习样本集中每个样本点到样本中心的距离的均值和标准差s。3.根据权利要求1所述的基于鱼群摄食活动量化的精准投喂方法,其特征在于,在所述将灰度图序列输入所述外观自编码器网络之后,在所述确定外观损失函数之前,具体还包括:将灰度图序列中的每一帧灰度图依次输入到所述外观编码器模块中进行特征提取,得到每一帧灰度图的外观特征表示;利用所述注意力模块关注所述每一帧灰度图的外观特征表示中的鱼群自身信息,忽略外部光线和背景噪声信息,得到每一帧灰度图的外观关注特征;将所述每一帧灰度图的外观关注特征依次输入到所述外观解码器模块中进行重构,得到每一帧重构后的灰度图;将所述每一帧重构后的灰度图进行叠加,得到重构的灰度图序列。4.根据权利要求1所述的基于鱼群摄食活动量化的精准投喂方法,其特征在于,在所述
将差帧图序列输入所述运动自编码器网络之后,在所述确定运动损失函数之前,具体还包括:将差帧图序列输入到所述运动编码器模块进行特征提取,得到运动特征表示;利用所述记忆模块确定所述运动特征表示中鱼群非摄食状态下的典型运动特征;将所述鱼群非摄食状态下的典型运动特征输入到所述运动解码器模块中进行重构,得到重构的差帧图序列。5.根据权利要求1所述的基于鱼群摄食活动量化的精准投喂方法,其特征在于,所述总损失函数的计算公式如下:其中,l为总损失函数,l
a
为外观损失函数,l
m
为运动损失函数,x
a
为输入的灰度图序列,为重构的灰度图序列,x
m
为输入的差帧图序列,为重构的差帧图序列。6.根据权利要求1所述的基于鱼群摄食活动量化的精准投喂方法,其特征在于,所述采用所述训练完成的鱼群摄食活动量化模型对鱼群摄食视频集中待检测的鱼群摄食视频进行量化,得到连续的鱼群摄食活动指数,具体包括:从鱼群摄食视频集中选择待量化视频,从视频中依次读取固定帧数的视频序列;对所述视频序列进行转换,得到对应的灰度图序列和差帧图序列;将所述灰度图序列和差帧图序列输入到训练完成的鱼群摄食活动量化模型,分别得到重构的灰度图序列和重构的差帧图序列;根据所述灰度图序列和差帧图序列及所述重构的灰度图序列和重构的差帧图序列,确定所述鱼群摄食活动指数,计算公式如下所示:其中,fai为鱼群摄食活动指数,x
b
为输入的灰度图序列,为重构的灰度图序列,x
n
为输入的差帧图序列,为重构的差帧图序列,λ为平衡分数。7.根据权利要求1所述的基于鱼群摄食活动量化的精准投喂方法,其特征在于,所述根据所述连续的鱼群摄食活动指数和检测阈值判断当前的鱼群是否正在摄食,根据判断结果自适应的调控投喂量,具体包括:判断是否成立,得到第一判断结果;其中,df为鱼群摄食活动指数到样本中心c的距离,为阈值学习样本集中每个样本点到样本中心的距离的均值,s为阈值
学习样本集中每个样本点到样本中心的距离的标准差;若所述第一判断结果为是,则表示鱼群摄食活动指数对应于摄食事件;若所述第一判断结果为否,则表示鱼群摄食活动指数对应于非摄食事件;判断所述非摄食事件的个数是否超过预设阈值,得到第二判断结果;若所述第二判断结果为否,则保持投饵机的开启;若所述第二判断结果为是,则关闭投饵机。8.一种基于鱼群摄食活动量化的精准投喂系统,所述系统利用权利要求1-6任一项所述的基于鱼群摄食活动量化的精准投喂方法,所述系统包括:鱼群活动视频库获取单元,用于获取鱼群活动视频库,包括鱼群非摄食视频集和鱼群摄食视频集;量化分析单元,用于利用鱼群非摄食视频集,基于深度无监督学习,构建鱼群摄食活动量化模型,对鱼群摄食活动进行连续的量化分析,具体包括:基于外观自编码器网络和运动自编码器网络,构建鱼群摄食活动量化模型,所述外观自编码器网络包括外观编码器模块、注意力模块和外观解码器模块,所述运动自编码器网络包括运动编码器模块、记忆模块和运动解码器模块;利用鱼群非摄食视频集,获取视频样本数据集,所述视频样本数据集为若干时间连续的视频样本;从所述视频样本数据集中提取固定帧数的视频序列,对所述视频序列进行转换,得到对应的灰度图序列和差帧图序列;将所述灰度图序列输入所述外观自编码器网络,将所述差帧图序列输入所述运动自编码器网络,输出重构的灰度图序列和重构的差帧图序列;根据所述灰度图序列和所述重构的灰度图序列,确定外观损失函数;根据所述差帧图序列和所述重构的差帧图序列,确定运动损失函数;根据所述外观损失函数和所述运动损失函数,确定总损失函数;根据所述总损失函数迭代优化所述外观自编码器网络和所述运动自编码器网络中的参数,以对所述鱼群摄食活动量化模型进行训练,得到训练完成的鱼群摄食活动量化模型;采用所述训练完成的鱼群摄食活动量化模型对鱼群摄食视频集中待检测的鱼群摄食视频进行量化,得到连续的鱼群摄食活动指数。9.投喂决策单元,用于根据所述连续的鱼群摄食活动指数和检测阈值判断当前的鱼群是否正在摄食,根据判断结果自适应的调控投喂量。10.一种基于鱼群摄食活动量化的精准投喂装置,所述装置利用权利要求1-6任一项所述的基于鱼群摄食活动量化的精准投喂方法,所述投喂装置包括:工业摄像机、核心处理器、投喂系统和显示平台;所述工业摄像机,与所述核心处理器相连,固定在循环水养殖池的顶部,所述工业摄像机面向水面,用于获取水产养殖池中鱼群活动视频,并将获取的视频传输至所述核心处理器;所述核心处理器,用于根据所述工业摄像机获取的水产养殖池中鱼群活动视频计算鱼群摄食活动指数和检测阈值,根据所述鱼群摄食活动指数和所述检测阈值,判断鱼群是否正在摄食,获得投喂决策结果;
所述投喂系统,包括通信控制器、电磁阀和饵料仓;所述通信控制器与所述核心处理器相连,用于接收所述投喂决策结果,并根据所述投喂决策结果驱动所述电磁阀;所述饵料仓用于盛放饵料,所述饵料仓出料口处设有挡板;所述电磁阀用于控制所述挡板的开启或关闭,以调控投喂量;所述显示平台,与所述核心处理器相连,用于显示实时获取的鱼群活动视频,并显示实时计算的鱼群摄食活动指数,以及投喂决策结果。
技术总结
本发明公开了一种基于鱼群摄食活动量化的精准投喂方法、系统及装置,涉及图像分析处理和动物行为分析领域。所述精准投喂方法包括:获取鱼群活动视频库,包括鱼群非摄食视频集和鱼群摄食视频集;利用鱼群非摄食视频集,基于深度无监督学习,构建鱼群摄食活动量化模型,对鱼群摄食活动进行连续的量化分析;根据连续的鱼群摄食活动指数和检测阈值判断当前的鱼群是否正在摄食,根据判断结果自适应的调控投喂量。本发明通过引入深度无监督学习,可以在无需数据标注的情况下实现鱼群摄食活动的连续量化,并基于连续量化值实现了鱼群智能化的精准投喂,可以有效保证鱼群摄食福利,避免饵料浪费。免饵料浪费。免饵料浪费。
技术研发人员:安冬 王雅倩 于晓宁 位耀光 李道亮
受保护的技术使用者:中国农业大学
技术研发日:2022.09.27
技术公布日:2022/12/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。