电子芯片的制造
1.相关申请的交叉引用
2.本技术要求于2021年5月28日提交的法国专利申请no.2105612的权益,该申请在此通过引用并入本文。
技术领域
3.实现方式和实施例涉及在空间(例如多维空间)中移动设备的定位,其中移动设备的位置由移动设备本身或者由不同于移动设备的实体来确定。
技术实现要素:
4.在一些应用中,可能感兴趣的是,移动设备(例如,托架)可以在多维空间(例如,机库)中自主地移位,例如,以自动地搜索存储在机库的确定位置处的对象(例如,托盘或纸箱),而不碰撞障碍物(例如机库的墙壁)。
5.在这点上,移动设备的位置应该能够在任何时刻被精确地确定。并且,该位置可以由移动设备本身或由不同于移动设备的实体(例如服务器)来确定。
6.在这点上,基础设施包括固定在机库的墙壁上的数个卫星或锚,并且打算周期性地传送超宽带(uwb)信号,使得移动设备能够计算它自己的位置或者它的位置可以由服务器永久地监测。
7.在这样的基础设施中,卫星可以相互时间同步。
8.并且,为了获得精确的时间同步,卫星可以使用uwb信号来同步,或者使用在连接这些卫星的电缆上传送的信号来同步。
9.然而,对于每个卫星,使用超宽带信号的同步意味着接收大量uwb帧,这意味着显著的能量消耗。因此,卫星可能不是电池供电的,除非使用大的,昂贵的,例如与卫星的尺寸不兼容的电池,并且必须是市电供电的,这是一个缺点。
10.在卫星之间使用电缆以允许其时间同步代表了基础设施成本的重要部分。
11.也可以在每个卫星上使用原子钟,以允许它们的时间同步。然而,这样的时钟是昂贵的。
12.因此,需要提出一种允许以工业上可接受的成本在其内精确地定位移动设备的基础设施。
13.根据一个实施例,所提出的是与仅用于发射称为同步信号的信号的卫星结合使用固定接收器设备,该同步信号相互时间不同步(异步),该固定接收器设备用于以与移动设备相同的方式接收这些同步信号。
14.同步信号在专用于卫星的时基中发射,并且每个时基具有相对于绝对参考时间的时间偏移。由于同步信号是相互不同步的,因此它们各自的时基是不同步的,也就是说,在例如涉及这些同步信号的发射点之间的距离的相应时间偏移之间没有确定的关系。
15.此外,这些时间信号的发射时刻是未知的,其取决于卫星专用的各个时基的时间偏移。
16.固定接收器设备也与卫星不同步,也就是说,它在它自己的时基中接收同步信号,与卫星的时基不同步并且具有相对于绝对时间的时间偏移,也是未知的。
17.移动设备还与卫星不同步,也就是说,它在它自己的时基中接收同步信号,与卫星的时基不同步,并且根据它的时基相对于绝对时间的时间偏移而具有也未知的时间偏移。
18.因为由卫星发射的同步信号在相互时间不同步,所以移动设备不能从这些同步信号确定其位置,因为它缺少时间信息。然后,固定接收器设备将从由固定设备对这些同步信号的接收中产生的丢失时间信息传送到移动设备,使得移动设备可以确定其位置。
19.相反,如果固定设备或耦合到固定设备的实体希望确定移动设备的位置,则它不能单独接收由卫星发射的同步信号。在这种情况下,是移动设备向固定设备传送丢失的时间信息,这将允许固定设备确定移动设备的位置。
20.并且,由于卫星仅发射同步信号,因此它们不需要进入接收模式来收听信号以便在时间上同步,因此它们可以容易地用例如小尺寸的电池供电,因为它们的能量消耗相对于必须被置于接收模式以便在时间上同步的卫星显著降低。
21.根据一个实施例,提出了一种用于在维数为n的空间中定位移动设备的方法,n大于或等于1。
22.通常,n等于3,则该空间是三维空间,例如机库。
23.根据该实施例的方法包括分别从所述空间中的至少n 1个固定发射位置发射至少一组至少n 1个相互时间异步的同步信号。
24.例如,同步信号由位于这些发射点的发射设备或卫星发射,并且有利地由电池供电。
25.当然,同步信号的数量可以大于n 1。
26.该方法还包括由移动设备在所述空间中的至少一个固定接收位置处接收所述至少一个组的同步信号。
27.接收器设备可以固定到每个接收位置。
28.该方法还包括由移动设备在移动设备专用的时基中确定所述至少一个组的每个同步信号的接收时刻。
29.该方法还包括在专用于每个接收位置的时基中确定在所述至少一个接收位置处的所述至少一个组的同步信号的接收时刻。
30.当然,可以提供数个固定的接收位置,从而提供数个接收器设备。
31.该方法还包括根据在所述至少一个接收位置处确定的接收时刻,由移动设备确定的接收时刻,发射位置在所述空间中的坐标以及每个发射位置与所述至少一个接收位置之间的距离,确定在给定时刻在所述空间中移动设备的位置。
32.并且,移动设备的位置的这种确定可以由移动设备本身或由位于固定接收位置的接收器设备或耦合到该接收器设备的实体来确定。
33.一组至少n 1个发射的同步信号允许在给定时刻确定移动设备的位置。
34.在该组内,这些n 1个同步信号可以例如在不同的信道上被连续地发射,或者对于它们中的至少一些被同时发射。
35.该方法有利地包括n 1个同步信号的连续组的发射以及在分别与所述连续组相关联的连续时刻确定移动设备的位置。
36.因此,可以永久地确定和/或监测移动设备的位置。
37.根据一个实施例,从在所述至少一个接收位置处确定的接收时刻获得的时间信息被从所述至少一个接收位置传送到移动设备,使得移动设备能够自己确定其位置。
38.该时间信息例如可以是在所述至少一个接收位置处确定的接收时刻本身,或者是这些接收时刻之间的差值。
39.可替换地,时间信息可以从由移动设备确定的接收时刻获得,然后由移动设备传送到所述至少一个接收位置,使得不同于移动设备并且耦合到所述至少一个接收位置的第三方实体能够确定移动设备的位置。
40.当然,该第三方实体可以是位于接收位置的接收器设备,或者例如是耦合到该接收器设备的服务器。
41.虽然这不是绝对必要的,但是同步信号是超宽带信号是特别有利的。
42.实际上,这样的信号允许移动设备或固定接收设备准确地确定它们的接收时刻。
43.至于从移动设备传送到固定接收器设备或从固定接收器设备传送到移动设备的时间信息,最好也可以在超宽带信号内传送。
44.然而,它也可以通过任何其它方式传送,例如通过使用蓝牙技术或例如通过wi-fi。
45.根据另一实施例,提出了一种基础设施,包括:
46.维数为n的空间,n大于或等于1;
47.至少n 1个发射器设备,其分别位于所述空间中的至少n 1个固定发射位置处,并且被配置为发射至少一组至少n 1个相应的相互时间异步的同步信号;
48.至少一个接收器设备,其位于所述空间中的至少一个固定接收位置处,并且被配置为接收所述同步信号以及确定所述同步信号在专用于每个接收器设备的时基中的接收时刻;
49.移动设备,其被配置为接收每个同步信号以及确定每个同步信号在专用于所述移动设备的时基中的接收时刻;以及
50.处理设备,其被配置为根据由所述至少一个接收器设备确定的接收时刻,由所述移动设备确定的接收时刻,所述空间中的发射位置的坐标以及每个发射位置与所述至少一个接收位置之间的距离来确定在给定时间在所述空间中所述移动设备的位置。
51.根据一个实施例,移动设备包括所述处理设备,并且所述至少一个接收器设备被配置为根据由所述至少一个接收器设备确定的接收时刻来生成时间信息,并且将该时间信息传送到移动设备,使得移动设备能够自己确定其位置。
52.可替换地,基础设施包括与移动设备不同的第三方实体,其耦合到所述至少一个接收器设备(并且其可以是该接收器设备或一个接收器设备本身)并结合处理设备。
53.然后,移动设备被配置为根据由移动设备确定的接收时刻生成时间信息,并且将该时间信息传送到所述至少一个接收器设备,使得第三方实体能够确定移动设备的位置。
54.时间信息有利地在超宽带信号内传输。
55.发射器设备还有利地被配置为发射n 1个同步信号的连续组,并且处理设备被配置为在分别与所述连续组相关联的连续时刻确定移动设备的位置。
56.基础设施可能包括数个接收设备。
57.当多维空间对于单个固定接收器设备来说太大而不能接收由所有发射器设备或卫星发射的同步信号时,情况尤其如此。
58.在这种情况下,这些接收器设备可以相互时间同步。
59.或者,至少一些接收器设备可以相互时间异步。
60.还可以使用接收器设备来同步其他异步接收器设备。
61.如上所述,由发射器设备发射的同步信号有利地是超宽带信号。
62.发射器设备有利地是电池供电的。
63.根据另一实施例,还提出了属于如上定义的基础设施的发射器设备。
64.根据另一实施例,提出了属于如上定义的基础设施的接收器设备。
附图说明
65.本发明的其他优点和特征将通过检查实施方式和实施例的详细描述和附图而变得显而易见,所述实施方式和实施例决不是限制性的,其中:
66.图1示出了根据实施例的用于确定移动设备的位置的系统;
67.在图2中示出了作为超宽带(uwb)信号的同步信号;
68.图3示意性地示出了根据实施例的发射器设备或卫星的体系结构;
69.图4示意性地示出了根据实施例的接收器设备的体系结构;
70.图5示意性地示出了根据实施例的移动设备的体系结构;
71.图6示出了根据实施例的用于确定移动设备的位置的方法;
72.图7示出了根据另一实施例的用于确定移动设备的位置的系统;以及
73.图8示出了根据又一实施例的用于确定移动设备的位置的系统。
具体实施方式
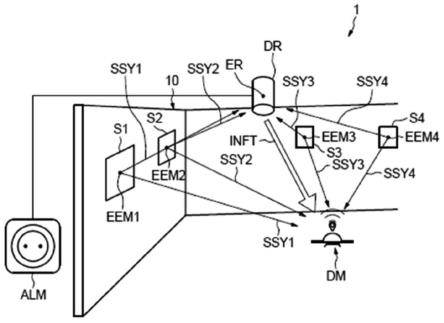
74.在图1中,附图标记1表示基础设施或系统,在该示例中包括定义三维空间的驻地10。
75.移动设备dm意图在驻地10内移动,并且期望确定其在驻地10中的位置。
76.在图1所示的示例中,移动设备dm本身将确定其位置。
77.在该示例中,基础设施1包括固定在三维空间中的分别位于四个发射位置eem1-eem4的四个发射器设备或卫星s1-s4。在这点上,卫星可以固定在房屋的一个或多个墙壁上,并且可能固定在其天花板上。
78.每个卫星在三维空间中的坐标是已知的。这四个卫星s1-s4被配置为发射四个相应的同步信号ssy1-ssy4的连续组,这四个同步信号ssy1-ssy4相互时间异步。
79.尽管这里只表示了四个卫星,当然,基础设施1包括更多数量的卫星si是完全可能的。
80.如将在下面更详细地讨论的图3中更具体地示出的,每个卫星si在此通过电池bati供电。
81.在图1的示例性实施例中,基础设施1还包括位于所述空间10中的固定接收位置er处的接收器设备dr。
82.该接收器设备被配置为接收同步信号ssyi以及确定这些同步信号ssyi在专用于
接收器设备dr的时基中的接收时刻。
83.尽管接收器设备dr可以由电池供电,但是接收器设备dr在这里由市电电源alm供电。
84.此外,如将在下面更详细地看到的,使得移动设备dm可以确定其在空间10中的位置,并且由于同步信号ssyi是相互异步的,所以将时间信息inft从接收器设备dr传送到移动设备dm,该时间信息inft的内容将在下面更详细地讨论。
85.如图2所示,同步信号ssyi在这里是超宽带(uwb)信号。
86.超宽带型技术是本领域技术人员公知的,并且与窄带和低扩展频谱技术的区别在于超宽带型信号的带宽通常包括在中心频率的约25%和约100%之间。
87.此外,代替传送用信息或与扩频码组合的信息调制的连续载波,超宽带技术提供一系列非常窄的脉冲pls的传送,扩频码确定信号带宽。
88.这些在时域中的极短脉冲在频域中变换,导致获得uwb技术的超宽带频谱特性。
89.这些脉冲pls具有已知的理论形式。
90.它们具有预定的时间宽度pw,例如在2纳秒的范围内。连续脉冲pls分别包含在长度t等于脉冲重复频率(prf)的倒数的连续时间窗口中。
91.作为指示,每个时间窗口的长度t例如等于50纳秒。
92.每个脉冲在时间窗中的位置可以根据伪随机码从一个窗到另一个窗变化。
93.脉冲pls具有超宽带型脉冲的特性,其中带宽半功率脉冲与中心频率的比率大于四分之一。作为指示,脉冲的中心频率可以在2和10ghz之间变化。
94.存在数种对传输信息进行编码的可能性。
95.因此,可以使用位置调制(ppm调制)。
96.在这种情况下,当信号携带用这种位置调制编码的信息时,根据传输信息的值0或1,脉冲可以相对于脉冲在窗口中的参考位置稍微提前或稍微延迟。
97.还可以使用脉冲的反极性编码。
98.以传统的和本身已知的方式,以uwb帧格式发射每个超宽带同步信号ssy。
99.该uwb帧格式可以包括以下部分:
100.同步报头(shr)具有前同步码和起始帧分隔符(sfd),
101.物理层报头(phr),包含关于帧长度的信息,数据速率和允许执行传输错误校正的信息。物理层报头还用于解码有效载荷字段(物理层:具体地,phy),其包含要传送的有效载荷数据。
102.除了帧的类型之外,这些有效载荷数据还可以包括帧的发射器设备的标识符。
103.此外,起始帧分隔符(sfd)可以用于以高准确度检测帧的接收时刻。
104.图3示意性地示出了发射器设备或卫星s1的体系结构。
105.这种结构本身是常规的和已知的。
106.更具体地,卫星s1包括基本处理设备eprmi,例如微控制器,其特别用于开发形成同步信号ssyi的uwb帧的内容。
107.然后,该信息被传送到传统结构的传输设备trmi,从而允许根据uwb技术传输信号ssyi。
108.存储设备mmi可以在空间10中结合卫星si的标识符及其坐标xi,yi和zi。
109.该信息例如可以在由卫星si传送的同步信号ssyi内传送。
110.此外,如上所述,电池bati为卫星si供电。
111.图4示意性地示出了接收器设备dr的体系结构。
112.这包括接收设备rcmr,其结构本身是常规和已知的,用于接收和处理接收的uwb帧。
113.包含在这些帧中的信息由诸如微控制器的基本处理设备eprmr处理。
114.如将在下面更详细地解释的,该基本处理设备eprmr将特别地确定每个接收的同步信号的接收时刻并执行计算,其内容将在下面更详细地讨论。
115.接收器设备dr还包括存储器mmr,用于例如包含空间10中不同卫星的坐标。
116.图5示意性地示出了移动设备dm的体系结构。
117.这里,这包括应答器或标签tg,其还包含基本处理设备prm,例如微控制器,以及接收设备rcmm,其具有传统的和本身已知的结构,用于接收和处理uwb帧,并将它们包含的有用信息传送到基本处理设备prm。
118.这里,基本处理设备prm将再次执行计算,其内容将在下面更详细地讨论。
119.应答器tg还可以包括存储器mmm,存储器mmm还包含例如空间中卫星si的坐标。
120.现在更具体地参考图6来描述该方法的实施例。
121.在步骤st60中,同步信号ssyi在步骤st61中由固定接收器设备dr和移动设备dm发射和接收。
122.在步骤st62中,确定移动设备的同步信号的接收时刻mtoa_si。
123.同样,在步骤st63中,确定接收器设备的同步信号的时刻rtoa_si。
124.在步骤st64中,根据接收时刻mtoa_si,rtoa_si,卫星si的坐标xi,yi,zi以及每个卫星si与接收器设备dr之间的距离d(si,dr)来确定移动设备dm在空间10中的位置,即其坐标xm,ym和zm。
125.该位置由处理设备确定。
126.移动设备dm的该位置可以由移动设备dm本身(在这种情况下,基本处理设备prm包括处理设备)或者由接收器设备dr(在这种情况下,基本处理设备eprmr包括处理设备)或者耦合到该接收器设备dr的诸如服务器的实体(在这种情况下,第三方实体包括处理设备)来确定。
127.现在采用图1的示例,其中移动设备dm的位置由设备dm本身确定。
128.移动设备dm在其自己的时基中的同步信号的接收时刻mtoa_s1由下面的等式eq1定义:
129.mtoa_s1=t_s1 d(s1,dm)/c-t_dm
130.mtoa_s2=t_s2 d(s2,dm)/c-t_dm
131.mtoa_s3=t_s3 d(s3,dm)/c-t_dm
132.mtoa_s4=t_s4 d(s4,dm)/c-t_dm
133.在这些公式中,d(si,dm)表示卫星si和移动设备dm之间的距离。
134.c表示同步信号的传播速度,这里是光速。
135.t_si表示由卫星si在其自己的时基中发射的同步信号ssyi的发射时刻。
136.取决于专用于卫星si的时基相对于绝对时间的时间偏移,该发射时刻t_si是未知
的。
137.t_dm指定取决于专用于移动设备dm的时基相对于绝对时间的时间偏移的时间偏移。
138.同样,该时间偏移是未知的。
139.接收时刻mtoa_si是将移动设备开始监听的时刻和相应同步信号ssyi被接收到的时刻分隔的持续时间。
140.如前所述,该接收时刻例如使用上述起始帧分隔符sfd来确定。
141.距离d(si,dm)由以下等式eq2限定。
142.d(si,dm)=[(x
i-xm)2 (y
i-ym)2 (z
i-zm)2]
1/2
[0143]
可以看出,下面的等式组eq1包括八个未知数,即时间偏移t_si,时间偏移t_dm和移动设备dm的坐标。
[0144]
通过执行这些接收时刻之间的差异,可以消除未知参数t_dm,如下面等式组eq3所示:
[0145]
mtdoa_1=mtoa_s1-mtoa_s2=t_s1-t_s2 d(s1,dm)/c-d(s2,dm)/c
[0146]
mtdoa_2=mtoa_s2-mtoa_s3=t_s2-t_s3 d(s2,dm)/c-d(s3,dm)/c
[0147]
mtdoa_3=mtoa_s3-mtoa_s4=t_s3-t_s4 d(s3,dm)/c-d(s4,dm)/c
[0148]
mtdoa_4=mtoa_s4-mtoa_s1=t_s4-t_s1 d(s4,dm)/c-d(s1,dm)/c
[0149]
然而,应注意,在这组等式eq3中,差值t_si-t_sj总是保持未知参数。
[0150]
这就是为什么能够确定时刻mtdoa_i的差的移动设备dm不能确定移动设备dm的坐标xm,ym和zm的原因。
[0151]
这些未知参数将能够由接收器设备dr在其自己的时基中接收同步信号ssyi的时刻来确定。
[0152]
更具体地,这些接收时刻rtoa_s1由下面的等式组eq4定义:
[0153]
rtoa_s1=t_s1 d(s1,dr)/c-t_dr
[0154]
rtoa_s2=t_s2 d(s2,dr)/c-t_dr
[0155]
rtoa_s3=t_s3 d(s3,dr)/c-t_dr
[0156]
rtoa_s4=t_s4 d(s4,dr)/c-t_dr
[0157]
不同的距离d(si,dr)是已知的,因为卫星和接收器设备dr在空间10中的坐标是已知的。
[0158]
因此,未知参数是时间偏移t_dr和发射时刻t_si。
[0159]
通过执行这些接收时刻之间的差值,可以确定差值t_si-t_sj,如下面的等式组eq5所示。
[0160]
t_s1-t_s2=rtoa_s1-rtoa_s2 d(s2,dr)/c-d(s1,dr)/c
[0161]
t_s2-t_s3=rtoa_s2-rtoa_s3 d(s3,dr)/c-d(s2,dr)/c
[0162]
t_s3-t_s4=rtoa_s3-rtoa_s4 d(s4,dr)/c-d(s3,dr)/c
[0163]
t_s4-t_s1=rtoa_s4-rtoa_s1 d(s1,dr)/c-d(s4,dr)/c
[0164]
因此,接收时刻rtoa_si形成例如从接收器设备传送到移动设备的时间信息inft(图1),从而允许移动设备确定差值t_si-t_sj。
[0165]
实际上,参考上面在上面的等式组eq3中计算的这些差值,移动设备的基本处理设
备prm因此可以求解等式组eq3并确定移动设备的位置xm,ym和zm。
[0166]
当然,代替传送这些接收时刻rtoa_si,可以直接传送在上面的等式组eq5中提到的差rtoa_si-rtoa_sj。
[0167]
其它组合也可以形成时间信息inft。
[0168]
现在更具体地参考图7,其示出了可替换的实施例和实现方式,其中它是例如连接到接收器设备dr的服务器sv,其将确定移动设备dm的位置。
[0169]
同样,以类似于上面已经描述的方式,为了确定移动设备在时刻t的位置,卫星si发射由接收器设备dr和移动设备dm接收的一组相应的同步信号ssyi。
[0170]
但是这次,如上所述,将确定移动设备位置的处理设备结合在接收器设备dr的基本处理设备epmpr中,或者结合在服务器中。
[0171]
此时,这些处理设备将需要从移动设备dm传送到接收设备dr的时间信息inft1。
[0172]
接收器设备dr在其自己的时基中接收同步信号ssyi的时刻rtoa_s1再次由上面的等式组eq4定义。
[0173]
这些接收时刻的差异允许定义如以上等式组eq5所定义的参数t_si-t_sj的差异。
[0174]
可以在等式组eq3中传送这些差值t_si-t_sj,但是接收器设备dr不能完成这些等式,因为它缺少信息mtoa_si-mtoa_sj。
[0175]
因此,在该替换实现和实施例中,从移动设备传送到接收器设备dr的时间信息inft1可以是移动设备接收同步信号ssy的时刻mtoa_si,或者差mtoa_si-mtoa_sj,或者允许生成时间信息inft1的任何其它组合。
[0176]
利用该信息,接收器设备的基本处理设备prm可以求解等式组eq3并且确定移动设备的坐标xm,ym和zm。
[0177]
信号组ssyi允许在给定时刻确定移动设备dm的位置。实际上,卫星随后连续发射数个组的n 1(这里为4)个同步信号ssyi,以便能够永久地确定移动设备dm的位置。
[0178]
此外,为了使移动设备dm或接收器设备dr能够在信号组ssyi中确定哪个卫星与接收到的同步信号相关联,例如可以使用包含在传送的同步信号中的卫星的标识符。
[0179]
或者,如果使用时分多址(tdma)方法,则可以向不同的卫星分配不同的时间间隔,在该时间间隔内它们将发射它们的同步信号。并且,知道这些时间间隔的移动设备和接收器设备可以在接收到同步信号时确定与其相关联的卫星。
[0180]
图8示出了基础设施的另一可能实施例。
[0181]
在这个示例中,提供了数个固定接收器设备,这里是两个接收器设备dr1,dr2。
[0182]
当驻地10太大以致单个接收器设备只能接收由卫星传送的同步信号时,情况尤其如此。
[0183]
在该示例中,假设的是移动设备将自己确定其位置。
[0184]
在这种情况下,以类似于上述的方式,设备dm将需要由接收器设备dr1,dr2中的至少一个接收设备提供的时间信息inft。
[0185]
在这点上,同步信号的接收时刻将由接收器设备dr1和dr2使用。
[0186]
更具体地,这里接收器设备dr1不能从卫星s4接收同步信号ssy4,并且设备dr2不能从卫星s3接收同步信号ssy3。
[0187]
由第一接收器设备dr1接收其它同步信号的时刻r1toa_s1由下面的等式eq7定义:
[0188]
r1toa_s1=t_s1 d(s1,dr1)/c-t_dr1
[0189]
r1toa_s2=t_s2 d(s2,dr1)/c-t_dr1
[0190]
r1toa_s3=t_s3 d(s3,dr1)/c-t_dr1
[0191]
由第二接收器设备dr2接收的其它同步信号的接收时刻r2toa_s1由下面的等式组eq8定义:
[0192]
r2toa_s1=t_s1 d(s1,dr2)/c-t_dr2
[0193]
r2toa_s2=t_s2 d(s2,dr2)/c-t_dr2
[0194]
r2toa_s4=t_s4 d(s4,dr2)/c-t_dr2
[0195]
从等式eq7可以推导出下面的等式组eq9,允许获得t_s1-t_s2和t_s2-t_s3。
[0196]
t_s1-t_s2=r1toa_s1-r1toa_s2-d(s1,dr1)c d(s2,dr1)/c
[0197]
t_s2-t_s3=r1toa_s2-r1toa_s3-d(s2,dr1)/c d(s3,dr1)/c
[0198]
从等式组eq8可以推导出下面的等式组eq10,允许定义t_s1-t_s2和t_s4-t_s1。
[0199]
t_s1-t_s2=r2toa_s1-r2toa_s2-d(s1,dr2)/c d(s2,dr2)/c
[0200]
t_s4-t_s1=r2toa_s4-r2toa_s1-d(s4,dr2)/c d(s1,dr2)/c
[0201]
等式组eq7和eq8还允许获得下面定义差值t_s3-t_s4的等式eq11。
[0202]
t_s3-t_s4=r1toa_s3-r2toa_s4-d(s3,dr1) d(s4,dr2) t_dr1-t_dr2
[0203]
在该等式eq11中可以看出,存在项t_dr1-t_dr2。
[0204]
然而,由于两个设备dr1和dr2在时间上是同步的,所以时间偏移中的这个差是已知的或被测量的,并且例如等于两个设备dr1和dr2之间的距离除以速度c。
[0205]
并且,如上所述,参考由等式组eq3中的等式eq9到eq11定义的时间偏移的差异,移动设备的基本处理设备prm可以确定移动设备dm的位置xm,ym和zm。
[0206]
因此,在该实现方式中,传送到移动设备的时间信息inft例如是等式eq9至eq11中提到的同步信号r1toa_s1和r2toa_s1的接收时刻,或者这些接收时刻之间的差,或者任何其他合适的组合。
[0207]
如果两个接收器dr1和dr2不同步,则差值t_dr1-t_dr2是未知的。然后可以添加第三接收器设备,其将用于传送该差值t_dr1-t_dr2的估计。
[0208]
本发明不限于刚刚描述的实现和实施例,而是包括其所有变体。
[0209]
可以提供发射连续组的相应同步信号的大量卫星,特别是在大型房屋的情况下。
[0210]
在这种情况下,将定位不同的卫星,使得移动设备和接收器设备总是接收至少四个同步信号的组。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。