技术特征:
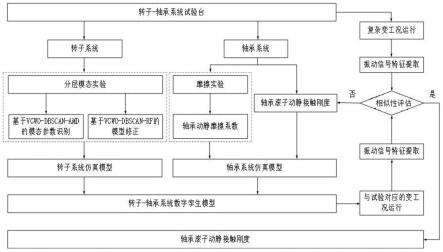
1.一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,该方法包括:步骤s1、针对转子-轴承系统试验台,分别构建轴承系统几何仿真模型和转子系统几何仿真模型,再对该转子系统几何仿真模型中各个部件执行分层模态试验;步骤s2、针对步骤s1分层模态试验所得结果,采用vgwo-dbscan-amd算法对其进行模态参数识别,并将模态参数值输入到adams有限元仿真模型中,用以构建转子系统仿真模型;其中,包括:首先基于改进dbscan聚类算法确定最优模态数,然后基于该最优模态数以及vmd算法对振动信号执行降噪处理,再利用自回归功率谱确定边界分割频率,接着利用vgwo确定最优分割频率并基于amd进行模态分解,得到各阶模态分量,最后得到模态振型;步骤s3、针对步骤s2中得到的转子系统仿真模型,采用基于vgwo-dbscan-svm的响应面模型修正算法对其进行修正,并根据修正后的模型参数构建高精度转子系统仿真模型;步骤s4、针对轴承系统几何仿真模型,分别进行摩擦实验和初始化轴承滚子动静接触刚度,用以搭建轴承系统初始仿真模型,其中,通过摩擦实验获得轴承动静摩擦系数;步骤s5、基于步骤s3得到的高精度转子系统仿真模型和步骤s4得到的轴承系统初始仿真模型,来构建转子-轴承系统数字孪生模型;步骤s6、分别将转子-轴承系统试验台和步骤s5建立的数字孪生模型在同样的复杂变工况下运行,提取输出的振动信号特征并利用相关性评价准则进行相似性评估;步骤s7、针对步骤s6获得的相似性评估结果,若振动信号特征相似性低于预先设定的值,则调整仿真模型中轴承滚子动静接触刚度直至输出的振动信号特征相似性高于该预先设定的值为止,输出当前轴承滚子接触刚度,其中,通过拟合多工况下的轴承滚子接触刚度值获得试验台全运行范围内的轴承滚子接触刚度值。2.根据权利要求1所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,所述步骤s1包括:步骤s101、构建轴承系统几何仿真模型,其包括:针对所述的转子-轴承系统试验台其中的轴承保持架、滚子和内外圈建立基于adams的轴承系统几何仿真模型;步骤s102、构建转子系统几何仿真模型,其包括:针对所述的转子-轴承系统试验台除去构建所述基于adams的轴承系统几何仿真模型所用部件之外的其他部件来构建基于adams的转子系统几何仿真模型;步骤s103、针对该转子系统几何仿真模型中各个部件以及该转子系统本身进行模态试验。3.根据权利要求1所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,在所述步骤s2中,所述基于改进dbscan聚类算法确定最优模态数,其具体包括:步骤s2011、计算基于步骤s1分层模态试验获取的振动响应数据集中数据点的局部密度如下:
在公式(1)中,d
c
表示截断距离;η为数据集个数;i
s
={1,2,....,η}为数据集对应的指标集;d
ij
为数据点γ
i
和γ
j
之间的距离;ρ
i
为s中与γ
i
之间的距离小于d
c
的数据点个数;步骤s2012、设计表示的一个降序排列下标序,满足ρ
q1
≥ρ
q2
≥
…
≥ρ
qη
;计算距离如下:在公式(2)中,表示数据点与数据点之间的距离;当具有最大局部密度时,δ
qi
表示数据集中与距离最大的数据点与之间的距离;在所有局部密度大于的数据点中,与距离最小的数据点与之间的距离;步骤s2013、确定聚类中心,其包括:选择具有高局部密度和相对较高的距离的点作为聚类中心,将剩余点归属到相应具有更高密度的最近邻所属类簇中,并确定最优模态数k=3。4.根据权利要求3所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,在所述步骤s2中,所述基于该最优模态数以及vmd算法对振动信号执行降噪处理,其具体包括:根据步骤s2013获取的最优模态数k对步骤s1所提取的振动信号进行分解降噪处理;分析vmd分解后的分量与原始信号的皮尔逊相关性,作为降噪重构的依据。5.根据权利要求4所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,在所述步骤s2中,所述利用自回归功率谱确定边界分割频率,其具体包括:采用ar模型谱代替傅里叶谱确定功率谱峰值和amd的边界分割频率,ar模型表示信号如下:在公式(3)中,p为ar模型阶数;u(n)为均值是0,方差为的白噪声序列;a
k
(k=1,2,...,p)为对应的p阶模型参数;自回归模型标准方程如下:
在公式(4)中,r
x
(m)为自回归变量;r
k
(k)为自回归变量序列;则信号x(n)的自回归功率谱p
ar
(e
jω
)可由下式计算:其中,ar模型谱使用burg法估计。6.根据权利要求5所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,在所述步骤s2中,所述利用vgwo确定最优分割频率并基于amd进行模态分解,其具体包括:步骤s2041、根据振动信号的自回归功率谱图采用峰值拾取法确定结构前d阶有阻尼自振频率ω=[ω1,ω2,...,ω
d
]
t
;步骤s2042、采用vgwo优化amd中的边界分割频率来得到最优化的振动衰减曲线,基于vgwo创建含有n个粒子组成的种群d=(d1,d2,...,d
n
),其中d
i
=[d
i1
,d
i2
,...,d
id
]
t
,则amd的边界分割频率可表示为:在公式(6)中,d
ij
为第i个粒子中结构第j阶模态的边界分割频率截断带宽;n为粒子个数;步骤s2043、为了利用性能指标优化参数,设计适应度值可由amd分解分离所得的信号x
j
(t)和其余信号x
k
(t)的相关系数计算得出,适应度函数满足:在公式(7)中,ρ
j
是x
j
(t)和x
k
(t)的皮尔逊相关系数;和分别是样本x
j
(t)和x
k
(t)的均值;t是样本个数;若x
j
(t)被完全分离,则x
j
(t)和x
k
(t)的相关系数最小;步骤s2044、将粒子群优化算法的速度分量引入到灰狼优化算法中形成变速灰狼优化算法,融合粒子群算法的速度和位置分量如下所示:
p
i
(m 1)=p
i
(m) v
i
(m 1)(9)在公式(8)和(9)中,v
i
是第i个灰狼的速度;p
i
是第i个灰狼的当前位置;c1、c2、c3是学习因子且满足c1,c2,c3∈[0,1];ζ是惯性因子;m是迭代次数;x
gwo1
、x
gwo2
、x
gwo3
分别为灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进向量;所述得到模态振型,其具体包括:通过步骤s204中利用amd分解出各阶模态分量后,考虑所有l个传感器位置上的结构模态响应获得模态振型,其中,结构第k阶模态振型向量如下:在公式(10)中,u
k,j
(t
m
)为第j个传感器位置上的第k阶模态响应;t
m
为模态响应局部最小或局部最大值发生的时间;l为安装振动传感器个数;nor(
·
)代表归一化计算;分别取k=1,2,...,k,并重复式(10)的计算,得到模态振型矩阵7.根据权利要求6所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,所述步骤s3具体包括:步骤s301、基于改进dbscan聚类算法确定最优模态数k;步骤s302、利用支持向量机对响应面进行拟合,用以建立修正变量γ与模态频率之间的svm响应面模型,其中,根据步骤s301所得最优模态数设定响应面拟合个数为k,给定修正变量γ与模态频率的l个样本集合:{(γ1,θ
1,k
),(γ2,θ
2,k
),...,(γ
l
,θ
l,k
)}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)在公式(11)中,l为样本数量;γ
i
是待修正变量;θ
i,k
为样本输出;k=1,2,...,k为第k阶模态频率;以拟合精度ε作为误差函数,则优化问题如下:在公式(12)中,α
i
和为lagrange系数;κ(γ
i
,γ
j
)为任何满足mercer条件的核函数;求解式(12)得到第k阶模态频率与修正变量γ的非线性回归拟合函数:步骤s303、利用所述vgwo算法进行模型修正,其具体包括:基于步骤s302所建立的支持向量机响应面,以实测模态频率与理论模态频率θ
i,k
之差建立目标函数如下:
在公式(14)中,γ
l
和γ
u
分别为修正变量的上限与下限。8.根据权利要求7所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,所述步骤s5具体包括:通过使用adams仿真软件,将步骤s4所得轴承系统初始仿真模型中轴承外圈和轴承内圈分别与基于步骤s3获得的高精度转子系统仿真模型中轴承座以及与转轴通过外联点连接;同时,将轴承滚子与内外圈设置为接触,对转轴添加转动副,在平台底座添加薄层单元并将薄层单元与大地固连。9.根据权利要求8所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,所述步骤s6具体包括:步骤s601、执行振动信号特征提取,其包括:步骤s6011、针对转子-轴承系统试验台和数字孪生模型,同时改变转子-轴承系统的载荷和转速,载荷和转速变化范围应覆盖转子-轴承系统试验台的工作范围,在试验台和数字孪生模型的相同位置以相同的采样频率提取复杂变工况下的时域振动信号;步骤s6012、对所获取的变工况振动数据分别提取:时域特征、频域特征以及时频域特征;步骤s6013、再通过上述的特征来构建特征集;步骤s602、执行特征相似性评估,其具体包括:对步骤s601获得的试验台和数字孪生模型的时域特征、频域特征和时频域特征利用相关性评价准则进行相似性评估,相关性评价准则构建如下:在公式(15)中,f
h
和l
h
分别表示第h个样本的特征值和对应时刻序列;和分别是样本特征值序列和时间序列均值;h是样本个数;相关性评价指标的取值为0~1,试验台与数字孪生模型振动信号的特征相关性越好,取值越接近1,否则越接近0。10.根据权利要求9所述的一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,其特征在于,所述步骤s7具体包括:步骤s701、执行单一工况轴承滚子动静接触刚度获取,其具体包括:当基于步骤s602获得的所有特征的相似性均超过0.7时,表示试验台与数字孪生模型的属于振动信号特性基本一致,则认为当前轴承滚子动静接触刚度为对应工况下的轴承滚子接触刚度;否则,调整轴承滚子动静接触刚度直至输出振动信号的所有特征相似性均超过0.7;步骤s702、执行全运行范围轴承滚子动静接触刚度获取,其具体包括:将载荷和转速变化的多工况下获得的轴承滚子动静接触刚度进行拟合,获得转子-轴承试验台全运行范围内的轴承接触刚度变化曲线。
技术总结
本发明公开了一种基于数字孪生模型的轴承滚子动静接触刚度测量方法,包括:分别构建转子系统和轴承系统;针对转子系统,设计基于VGWO-DBSCAN-AMD的算法进行模态参数识别并设计响应面算法进行仿真模型修正,进而获得高精度的转子系统仿真模型;针对轴承系统,进行摩擦试验获得轴承滚子摩擦系数并搭建轴承系统初始仿真模型;通过组建轴承系统和转子系统仿真模型得到数字孪生模型;将系统试验台和数字孪生模型在相同工况下运行并同时提取时域振动信号,利用相关性评价准则对振动特征进行相关性分析,调整滚子接触刚度获得不同工况下试验台的接触刚度真值,拟合多工况下的接触刚度获得试验台全运行范围内的轴承滚子接触刚度值。值。值。
技术研发人员:马磊明 姜斌 张旺 郭勤涛 陈凯 肖玲斐
受保护的技术使用者:中国航发南方工业有限公司
技术研发日:2022.07.27
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。