1.本发明属于自动化技术领域,尤其涉及一种砂芯粘石棉圈系统。
背景技术:
2.目前铸造行业中,生产铸件时,需要制作砂芯,然后进行铁水浇铸,而为保证铸件的良品率,制作砂芯时需要在上面粘石棉圈,保证排气畅通。
3.现有的操作方法都是人工用推车将一筐石棉圈运送至粘石棉圈工位处,人工拿取几片石棉圈,然后一片一片的放置到砂芯上,基本全靠人工实现,这种操作方式导致铸造线的生产效率非常低,而且增加了操作工人的劳动强度,大大增加了生产成本。
4.综上所述,亟需提供一种可实现砂芯粘石棉圈全流程自动化、生产效率高、减少人工劳动强度并降低生产成本的砂芯粘石棉圈系统。
技术实现要素:
5.本发明的目的是提供一种可实现砂芯粘石棉圈全流程自动化、生产效率高、减少人工劳动强度并降低生产成本的砂芯粘石棉圈系统。
6.上述目的是通过如下技术方案实现:一种砂芯粘石棉圈系统,包括输送辊道、定位装置、供料装置和机器人系统总成,所述输送辊道上设有运输砂芯的输送托盘,所述定位装置设置在所述输送辊道的侧边并用于将所述输送托盘定位在所述输送辊道的预定位置,所述供料装置包括给料组件和分料组件,所述给料组件包括机架、料仓和给料机,所述料仓和给料机设置在所述机架上,所述料仓的出料口设有第一出料槽,所述第一出料槽位于所述给料机的进料口的上方,所述给料机设有第二出料槽,所述分料组件包括支撑架和分料构件,所述分料构件设置在所述支撑架上,所述分料构件包括驱动件和分料板,所述分料板上设有多个储料口,所述驱动件和分料板传动连接,所述驱动件用于驱动所述分料板运动并将不同的储料口分别与所述第二出料槽的出料口对齐,所述分料组件设有用于检测石棉圈填入储料口的第一光电开关,所述第一光电开关与所述驱动件通信连接并用于控制所述驱动件的启停,所述机器人系统总成包括机器人以及自动粘石棉圈夹具,所述自动粘石棉圈夹具连接在机器人的轴末端,所述自动粘石棉圈夹具包括夹具框架、导轨、顶针组件、位置调整板和限位块,所述位置调整板设置在所述夹具框架上,所述导轨设置在所述夹具框架上,所述限位块设置在所述导轨的两端,多个所述顶针组件与所述导轨滑动连接并可固定在所述位置调整板的预定位置,所述顶针组件包括安装架、伸缩驱动件、压板、扎针和针盘,所述安装架套接在所述导轨上,所述伸缩驱动件固定在所述安装架上,所述扎针固定所述针盘上,所述针盘与所述伸缩驱动件的活动端相连,所述压盘固定在所述安装架上,所述伸缩驱动件用于驱动所述扎针垂直于所述压盘运动并可穿过所述压盘。
7.本发明通过机器人给砂芯粘石棉圈,具体应用过程中,操作人员对料仓内进行加料,人工将石棉圈加入料仓后,石棉圈分散成一个平面,平铺在第一出料槽,石棉圈由第一出料槽在振动下进入给料机,在给料机的第二料槽中石棉圈排除一条直线,经给料机的第
二出料槽进入石棉圈分料组件的分料板上的储料口内,当第一光电开关检测到一个石棉圈填入第二出料槽对齐的储料口后,驱动件带动分料板运动,分料板的下一储料口与第二出料槽的出料口对齐,石棉圈进入该储料口,重复以上动作使得分料板一侧的所有储料口内均填有石棉圈。分料板一侧的储料口的数量以及间距与砂芯上需要粘的石棉圈的数量以及间距保持一致;而砂芯放置在砂芯输送托盘上,由输送辊道输送至预定位置由定位装置进行定位。
8.根据实际需要,顶针组件在导轨上滑动,移动至预定位置后与位置调节板进行固定,这样使得自动粘石棉圈夹具一侧的顶针组件的数量以及间距与分料板一侧的储料口的数量以及间距保持一致,机器人带动夹具运动到石棉圈上料处,等分料板一侧的储料口的石棉圈填充到位后,控制伸缩驱动件运动,带动活动端的扎针运动,扎针穿过压盘后扎取石棉圈。抓取后,机器人带动夹具运动到砂芯需要放置石棉圈处,与砂芯表面贴合,再控制伸缩驱动件运动收缩,石棉圈在压板的作用下固定不动,活动端的扎针收回至压盘内与石棉圈脱离,石棉圈留着砂芯上,之后机器人带动夹具退回初始位置,继续下一次的石棉圈的抓取和放置,当输送托盘上的砂芯贴好石棉圈后,定位装置动作,解除对该输送托盘的限制,贴好石棉圈的砂芯运走,下一装有砂芯的输送托盘运至预定位置后定位装置动作对其进行定位,重复上述动作完成砂芯贴石棉圈的过程。
9.本发明将砂芯粘石棉圈全流程自动化,通过给料组件和分料组件将石棉圈分散成不同产品需要的距离,机器人带动夹具自动抓取多片石棉圈一次性放置到砂芯上,以满足作业要求,可提高生产效率,工作效率高,可适应不同产品,一致性好,减少人工劳动强度和生产成本。
10.进一步的技术方案是,所述砂芯粘石棉圈系统设有安全围栏,所述安全围栏和输送辊道构成装配空间,所述定位装置、供料装置和机器人系统总成设置在所述装配空间内。优选,为保证效率,可设置两个供料装置分别位于机器人系统总成的两侧。机器人优选为六轴机器人,机器人通过底座固定在相应位置,自动粘石棉圈夹具通过连接法兰连接在机器人六轴末端。
11.进一步的技术方案是,所述定位装置包括设置在所述输送辊道两侧的定位气缸,所述定位气缸的活动端设有推板,所述推板设有定位块,所述定位块设有卡槽,所述输送托盘设有定位销,所述卡槽卡住所述定位销实现定位。具体,输送辊道的预定位置可以设置位置感应器,位置感应器感应到输送托盘到达预定位置时发送信号给控制器控制定位气缸动作,气缸伸出,定位块伸入到输送辊道内,卡槽卡住定位销实现定位,此时输送托盘不再随着输送辊道运动;当该输送托盘上的砂芯贴好石棉圈后,机器人反馈信号给控制器,控制定位气缸收缩,定位块缩回,解除对该输送托盘的定位。
12.进一步的技术方案是,至少两块所述位置调整板分别设置在所述夹具框架的两侧,所述夹具框架上设有位置调节参考表,所述位置调整板的预订位置设有与所述位置调节参考表配合使用的位置参数。如此设置,使用者根据需要生产产品型号,通过查看位置调节参考表确定需要将顶针组件调节至在位置调整板上的具体的位置参数处,这样根据对照结果,找到对应的位置参数,调节顶针组件使其沿导轨滑动至对应的位置参数然后进行固定。夹具框架的两侧的两块位置调整板上的顶针组件分别取两个供料装置上的分料板的石棉圈。
13.进一步的技术方案是,所述安装架包括固定板,所述位置参数处设有连接孔,所述固定板设有穿接孔,所述穿接孔内穿接有旋转柱塞,所述顶针组件移动至预定的位置参数处后所述穿接孔与所述连接孔连通,所述旋转柱塞与所述连接孔螺纹连接。如此设置,需要调节时,拔出当前位置参数上的旋转柱塞的旋钮,使旋转柱塞前端从顶针组件位置调整板上缩回,并旋转90
°
,使得旋转柱塞锁定。最后,使得顶针组件在导轨上左右滑动,在位置调整板需要的相对应位置参数处停下,将旋转柱塞的旋钮并旋转90
°
,使得旋转柱塞解除锁定,且旋转柱塞前端与顶针组件位置调整板固定。
14.进一步的技术方案是,所述伸缩驱动件为气缸,所述气缸的进出气口处设有调速阀。
15.进一步的技术方案是,所述安装架设有与所述导轨配合使用的滑动轴承,所述导轨穿接所述滑动轴承。
16.进一步的技术方案是,与所述气缸的进气口相连的管道设有电磁阀。如此设置,通过电磁阀控制气缸运动实现扎针的取料和卸料。
17.进一步的技术方案是,所述给料组件设有用于检测所述第一出料槽上物料情况的第二光电开关,所述料仓设有控制出料的出料电机,所述第一出料槽的上方设有将所述第一出料槽上物料吹散的吹气组件,所述吹气组件固定在所述料仓上,所述第二光电开关与所述出料电机、吹气组件通信连接并用于分别控制所述出料电机、吹气组件的启停。
18.石棉圈加入料仓后,振动石棉圈分散成一个平面,平铺在第一出料槽上。在第一出料槽的上方设有第二光电开关,第二光电开关检测到在第一出料槽处石棉圈有堆积时给信号给吹气组件将石棉圈吹散并让料仓的出料电机停止工作,而检测到在第一出料槽处石棉圈不够时则让料仓电机开始工作进行下料。
19.进一步的技术方案是,所述储料口设置在所述分料板的两侧,同一侧的所述储料口之间的间距相同。分料板上的某一储料口位于第二出料槽的出料口下方,当第一光电开关感应到石棉圈从第二出料槽落到位分料板该储料口后,驱动件进而带动分料板运动,分料板的下一储料口与第二出料槽的出料口对齐,重复上述动作,不同测的储料口之间的间距相同,这样驱动件可采用步进电机,每次驱动分料板移动相同距离,保证每次移动后储料口均与第二出料槽的出料口对齐;不同侧的储料口之间的间距不相同,这样可适用于不同间距的产品,这样将分料板旋转180
°
,将分料板的另一侧储料口与第二出料槽的出料口对齐,扩大适用范围。
20.进一步的技术方案是,所述驱动件为伺服电机驱动模组,所述伺服电机驱动模组包括伺服电机和直线模组,所述直线模组与所述伺服电机传动连接,所述分料板固定在所述直线模组上。
21.进一步的技术方案是,所述第二出料槽为旋转料槽,所述旋转料槽的宽度与石棉圈的宽度相匹配。如此设置,保证给料机的旋转料槽中石棉圈排成一条直线,保证每次落下一个石棉圈在分料板的储料口内。
22.进一步的技术方案是,所述第一光电开关通过所述支撑挡板固定在所述支撑架上,所述第一光电开关设置在所述第二出料槽的出料口的上方。
23.进一步的技术方案是,所述第二出料槽的出料口设有用于检测所述第二出料槽的出料口的物料情况的第三光电开关,所述给料机设有振动电机,所述第三光电开关与所述
振动电机通信连接并用于控制所述振动电机的启停。第二出料槽的出料口设有第三光电开关,第三光电开关检测到第二出料槽的出料口石棉圈堆积时,让振动电机停止工作,检测到第二出料槽的出料口时则让出料电机开始工作。
24.进一步的技术方案是,所述机架设有可调节脚杯。如此,通过调节可调节脚杯调节机架的高度。
25.进一步的技术方案是,所述支撑架设有支承底板,所述支承底板通过调节螺栓固定。分料组件安装应用时,首先通过螺钉和销将直线模组固定在支撑架上;然后通过螺钉将伺服电机固定在直线模组上;接着通过螺钉和销将分料板固定在直线模组滑板上;然后通过螺钉将支撑挡板安装在支撑架上,并通过螺钉将第一光电开关安装在支撑挡板上;最后通过调节螺栓和支承底板将分料板的储料口与第二出料槽的出料口对齐。
26.进一步的技术方案是,所述料仓上方设有用于检测所述料仓内物料情况的第四光电开关,所述给料组件设有报警装置,所述第四光电开关与所述报警装置通信连接并用于控制所述报警装置的启停。如此设置,在第四光电开关检测料仓内石棉圈用完以后,会发生信号让报警装置工作进行报警提示人工加料。
27.相比于现有技术,本发明实现了全自动化粘石棉圈,包括自动上料、分料及粘贴,且可适应多种尺寸的不同类型工件,适应性高,并可以实现一次多片石棉圈放置,工作效率高,一致性好,减少人工劳动强度和生产成本。
附图说明
28.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
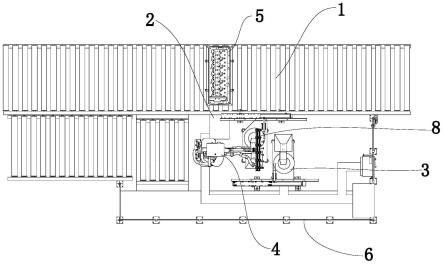
29.图1为本发明一种实施方式所涉及的砂芯粘石棉圈系统的平面布置示意图;
30.图2为本发明一种实施方式所涉及的供料装置的结构示意图;
31.图3为本发明一种实施方式所涉及的供料装置的侧视图;
32.图4为本发明一种实施方式所涉及的机器人系统总成的结构示意图;
33.图5为本发明一种实施方式所涉及的自动粘石棉圈夹具的结构示意图;
34.图6为本发明一种实施方式所涉及的自动粘石棉圈夹具的俯视图;
35.图7为本发明一种实施方式所涉及的顶针组件的结构示意图;
36.图8为本发明一种实施方式所涉及的顶针组件的侧视图;
37.图9为图8中所涉及的顶针组件的沿a-a面的剖视图;
38.图10为本发明一种实施方式所涉及的定位装置的结构示意图。
39.图中:
40.1输送辊道
ꢀꢀꢀꢀꢀꢀꢀ
2定位装置
ꢀꢀꢀꢀꢀꢀ
3供料装置
ꢀꢀꢀꢀꢀ
4机器人系统总成
41.5输送托盘
ꢀꢀꢀꢀꢀꢀꢀ
6安全围栏
ꢀꢀꢀꢀꢀꢀ
7机器人
ꢀꢀꢀꢀꢀꢀꢀ
8自动粘石棉圈夹具
42.9给料组件
ꢀꢀꢀꢀꢀꢀꢀ
10分料组件
ꢀꢀꢀꢀꢀ
11机架
ꢀꢀꢀꢀꢀꢀꢀꢀ
12支撑架
43.13料仓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14给料机
ꢀꢀꢀꢀꢀꢀꢀ
15第一出料槽
ꢀꢀ
16第二出料槽
44.17第一光电开关
ꢀꢀ
18分料板
ꢀꢀꢀꢀꢀꢀꢀ
19储料口
ꢀꢀꢀꢀꢀꢀ
20伺服电机驱动模组
45.21吹气组件
ꢀꢀꢀꢀꢀꢀ
22振动电机
ꢀꢀꢀꢀꢀ
23可调节脚杯
ꢀꢀ
24支承底板
46.25夹具框架
ꢀꢀꢀꢀꢀꢀ
26导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
27顶针组件
ꢀꢀꢀꢀ
28位置调整板
47.29限位块
ꢀꢀꢀꢀꢀꢀꢀꢀ
30安装架
ꢀꢀꢀꢀꢀꢀꢀ
31伸缩驱动件
ꢀꢀ
32压板
48.33扎针
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34针盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35位置参数
ꢀꢀꢀꢀ
36位置调节参考表
49.37固定板
ꢀꢀꢀꢀꢀꢀꢀꢀ
38旋转柱塞
ꢀꢀꢀꢀꢀ
39调速阀
ꢀꢀꢀꢀꢀꢀ
40滑动轴承
50.41定位气缸
ꢀꢀꢀꢀꢀꢀ
42推板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43定位块
ꢀꢀꢀꢀꢀꢀ
44卡槽
具体实施方式
51.下面结合附图对本发明进行详细描述,本部分的描述仅是示范性和解释性,不应对本发明的保护范围有任何的限制作用。此外,本领域技术人员根据本文件的描述,可以对本文件中实施例中以及不同实施例中的特征进行相应组合。
52.本发明实施例如下,参照图1~9,一种砂芯粘石棉圈系统,包括输送辊道1、定位装置2、供料装置3和机器人系统总成4,所述输送辊道1上设有运输砂芯的输送托盘5,所述定位装置2设置在所述输送辊道1的侧边并用于将所述输送托盘5定位在所述输送辊道1的预定位置,所述供料装置3包括给料组件9 和分料组件10,所述给料组件9包括机架11、料仓13和给料机14,所述料仓 13和给料机14设置在所述机架11上,所述料仓13的出料口设有第一出料槽 15,所述第一出料槽15位于所述给料机14的进料口的上方,所述给料机14 设有第二出料槽16,所述分料组件10包括支撑架12和分料构件,所述分料构件设置在所述支撑架12上,所述分料构件包括驱动件和分料板18,所述分料板18上设有多个储料口19,所述驱动件和分料板18传动连接,所述驱动件用于驱动所述分料板18运动并将不同的储料口19分别与所述第二出料槽16的出料口对齐,所述分料组件10设有用于检测石棉圈填入储料口19的第一光电开关17,所述第一光电开关17与所述驱动件通信连接并用于控制所述驱动件的启停,所述机器人系统总成4包括机器人7以及自动粘石棉圈夹具8,所述自动粘石棉圈夹具8连接在机器人7的轴末端,所述自动粘石棉圈夹具8包括夹具框架25、导轨26、顶针组件27、位置调整板28和限位块29,所述位置调整板28设置在所述夹具框架25上,所述导轨26设置在所述夹具框架25上,所述限位块29设置在所述导轨26的两端,多个所述顶针组件27与所述导轨26 滑动连接并可固定在所述位置调整板28的预定位置,所述顶针组件27包括安装架30、伸缩驱动件31、压板32、扎针33和针盘34,所述安装架30套接在所述导轨26上,所述伸缩驱动件31固定在所述安装架30上,所述扎针33固定所述针盘34上,所述针盘34与所述伸缩驱动件31的活动端相连,所述压盘固定在所述安装架30上,所述伸缩驱动件31用于驱动所述扎针33垂直于所述压盘运动并可穿过所述压盘。
53.本发明通过机器人7给砂芯粘石棉圈,具体应用过程中,操作人员对料仓 13内进行加料,人工将石棉圈加入料仓13后,石棉圈分散成一个平面,平铺在第一出料槽15,石棉圈由第一出料槽15在振动下进入给料机14,在给料机 14的第二料槽中石棉圈排除一条直线,经给料机14的第二出料槽16进入石棉圈分料组件10的分料板18上的储料口19内,当第一光电开关17检测到一个石棉圈填入第二出料槽16对齐的储料口19后,驱动件带动分料板18运动,分料板18的下一储料口19与第二出料槽16的出料口对齐,石棉圈进入该储料口 19,重复以上动作使得分料板18一侧的所有储料口19内均填有石棉圈。分料板18一侧的储料口19的数量以及间距与砂芯上需要粘的石棉圈的数量以及间距保持一致;而砂芯放置在砂芯输送托盘5上,由输送辊道1输送至预定位置由定位装置2进行定位。
54.根据实际需要,顶针组件27在导轨26上滑动,移动至预定位置后与位置调节板进
行固定,这样使得自动粘石棉圈夹具8一侧的顶针组件27的数量以及间距与分料板18一侧的储料口19的数量以及间距保持一致,机器人7带动夹具运动到石棉圈上料处,等分料板18一侧的储料口19的石棉圈填充到位后,控制伸缩驱动件31运动,带动活动端的扎针33运动,扎针33穿过压盘后扎取石棉圈。抓取后,机器人7带动夹具运动到砂芯需要放置石棉圈处,与砂芯表面贴合,再控制伸缩驱动件31运动收缩,石棉圈在压板32的作用下固定不动,活动端的扎针33收回至压盘内与石棉圈脱离,石棉圈留着砂芯上,之后机器人 7带动夹具退回初始位置,继续下一次的石棉圈的抓取和放置,当输送托盘5 上的砂芯贴好石棉圈后,定位装置2动作,解除对该输送托盘5的限制,贴好石棉圈的砂芯运走,下一装有砂芯的输送托盘5运至预定位置后定位装置2动作对其进行定位,重复上述动作完成砂芯贴石棉圈的过程。
55.本发明将砂芯粘石棉圈全流程自动化,通过给料组件9和分料组件10将石棉圈分散成不同产品需要的距离,机器人7带动夹具自动抓取多片石棉圈一次性放置到砂芯上,以满足作业要求,可提高生产效率,工作效率高,可适应不同产品,一致性好,减少人工劳动强度和生产成本。
56.上述实施例的基础上,本发明另一实施例中,如图1,所述砂芯粘石棉圈系统设有安全围栏6,所述安全围栏6和输送辊道1构成装配空间,所述定位装置2、供料装置3和机器人系统总成4设置在所述装配空间内。优选,为保证效率,可设置两个供料装置3分别位于机器人系统总成4的两侧。机器人7 优选为六轴机器人7,机器人7通过底座固定在相应位置,自动粘石棉圈夹具8 通过连接法兰连接在机器人7六轴末端。
57.上述实施例的基础上,本发明另一实施例中,如图10,所述定位装置2包括设置在所述输送辊道1两侧的定位气缸41,所述定位气缸41的活动端设有推板42,所述推板42设有定位块43,所述定位块43设有卡槽44,所述输送托盘5设有定位销,所述卡槽44卡住所述定位销实现定位。具体,输送辊道1 的预定位置可以设置位置感应器,位置感应器感应到输送托盘5到达预定位置时发送信号给控制器控制定位气缸41动作,气缸伸出,定位块43伸入到输送辊道1内,卡槽44卡住定位销实现定位,此时输送托盘5不再随着输送辊道1 运动;当该输送托盘5上的砂芯贴好石棉圈后,机器人7反馈信号给控制器,控制定位气缸41收缩,定位块43缩回,解除对该输送托盘5的定位。
58.上述实施例的基础上,本发明另一实施例中,如图5和图6,至少两块所述位置调整板28分别设置在所述夹具框架25的两侧,所述夹具框架25上设有位置调节参考表36,所述位置调整板28的预订位置设有与所述位置调节参考表36配合使用的位置参数35。如此设置,使用者根据需要生产产品型号,通过查看位置调节参考表36确定需要将顶针组件27调节至在位置调整板28上的具体的位置参数35处,这样根据对照结果,找到对应的位置参数35,调节顶针组件27使其沿导轨26滑动至对应的位置参数35然后进行固定。夹具框架 25的两侧的两块位置调整板28上的顶针组件27分别取两个供料装置3上的分料板18的石棉圈。
59.上述实施例的基础上,本发明另一实施例中,如图6和图7,所述安装架 30包括固定板37,所述位置参数35处设有连接孔,所述固定板37设有穿接孔,所述穿接孔内穿接有旋转柱塞38,所述顶针组件27移动至预定的位置参数35 处后所述穿接孔与所述连接孔连通,所述旋转柱塞38与所述连接孔螺纹连接。如此设置,需要调节时,拔出当前位置参数35上的旋转柱塞38的旋钮,使旋转柱塞38前端从顶针组件27位置调整板28上缩回,并旋转90
°
,使得旋转柱塞38锁定。最后,使得顶针组件27在导轨26上左右滑动,在位置调整板 28需要的
相对应位置参数35处停下,将旋转柱塞38的旋钮并旋转90
°
,使得旋转柱塞38解除锁定,且旋转柱塞38前端与顶针组件27位置调整板28固定。
60.上述实施例的基础上,本发明另一实施例中,如图7,所述伸缩驱动件31 为气缸,所述气缸的进出气口处设有调速阀39。
61.上述实施例的基础上,本发明另一实施例中,如图5,所述安装架30设有与所述导轨26配合使用的滑动轴承40,所述导轨26穿接所述滑动轴承40。
62.上述实施例的基础上,本发明另一实施例中,与所述气缸的进气口相连的管道设有电磁阀。如此设置,通过电磁阀控制气缸运动实现扎针33的取料和卸料。
63.上述实施例的基础上,本发明另一实施例中,如图2和图3,所述给料组件9设有用于检测所述第一出料槽15上物料情况的第二光电开关,所述料仓 13设有控制出料的出料电机,所述第一出料槽15的上方设有将所述第一出料槽15上物料吹散的吹气组件21,所述吹气组件21固定在所述料仓13上,所述第二光电开关与所述出料电机、吹气组件21通信连接并用于分别控制所述出料电机、吹气组件21的启停。
64.石棉圈加入料仓13后,振动石棉圈分散成一个平面,平铺在第一出料槽 15上。在第一出料槽15的上方设有第二光电开关,第二光电开关检测到在第一出料槽15处石棉圈有堆积时给信号给吹气组件21将石棉圈吹散并让料仓13 的出料电机停止工作,而检测到在第一出料槽15处石棉圈不够时则让料仓13 电机开始工作进行下料。
65.上述实施例的基础上,本发明另一实施例中,如图2,所述储料口19设置在所述分料板18的两侧,同一侧的所述储料口19之间的间距相同。分料板18 上的某一储料口19位于第二出料槽16的出料口下方,当第一光电开关17感应到石棉圈从第二出料槽16落到位分料板18该储料口19后,驱动件进而带动分料板18运动,分料板18的下一储料口19与第二出料槽16的出料口对齐,重复上述动作,不同测的储料口19之间的间距相同,这样驱动件可采用步进电机,每次驱动分料板18移动相同距离,保证每次移动后储料口19均与第二出料槽 16的出料口对齐;不同侧的储料口19之间的间距不相同,这样可适用于不同间距的产品,这样将分料板18旋转180
°
,将分料板18的另一侧储料口19与第二出料槽16的出料口对齐,扩大适用范围。
66.上述实施例的基础上,本发明另一实施例中,如图2和图3,所述驱动件为伺服电机驱动模组20,所述伺服电机驱动模组20包括伺服电机和直线模组,所述直线模组与所述伺服电机传动连接,所述分料板18固定在所述直线模组上。
67.上述实施例的基础上,本发明另一实施例中,如图2,所述第二出料槽16 为旋转料槽,所述旋转料槽的宽度与石棉圈的宽度相匹配。如此设置,保证给料机14的旋转料槽中石棉圈排成一条直线,保证每次落下一个石棉圈在分料板 18的储料口19内。
68.上述实施例的基础上,本发明另一实施例中,如图2,所述第一光电开关 17通过所述支撑挡板固定在所述支撑架12上,所述第一光电开关17设置在所述第二出料槽16的出料口的上方。
69.上述实施例的基础上,本发明另一实施例中,所述第二出料槽16的出料口设有用于检测所述第二出料槽16的出料口的物料情况的第三光电开关,所述给料机14设有振动电机22,所述第三光电开关与所述振动电机22通信连接并用于控制所述振动电机22的启停。第二出料槽16的出料口设有第三光电开关,第三光电开关检测到第二出料槽16的出料口石
棉圈堆积时,让振动电机22停止工作,检测到第二出料槽16的出料口时则让出料电机开始工作。
70.上述实施例的基础上,本发明另一实施例中,如图2,所述机架11设有可调节脚杯23。如此,通过调节可调节脚杯23调节机架11的高度。
71.上述实施例的基础上,本发明另一实施例中,如图2,所述支撑架12设有支承底板24,所述支承底板24通过调节螺栓固定。分料组件10安装应用时,首先通过螺钉和销将直线模组固定在支撑架12上;然后通过螺钉将伺服电机固定在直线模组上;接着通过螺钉和销将分料板18固定在直线模组滑板上;然后通过螺钉将支撑挡板安装在支撑架12上,并通过螺钉将第一光电开关17安装在支撑挡板上;最后通过调节螺栓和支承底板24将分料板18的储料口19与第二出料槽16的出料口对齐。
72.上述实施例的基础上,本发明另一实施例中,所述料仓13上方设有用于检测所述料仓13内物料情况的第四光电开关,所述给料组件9设有报警装置,所述第四光电开关与所述报警装置通信连接并用于控制所述报警装置的启停。如此设置,在第四光电开关检测料仓13内石棉圈用完以后,会发生信号让报警装置工作进行报警提示人工加料。
73.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。