技术特征:
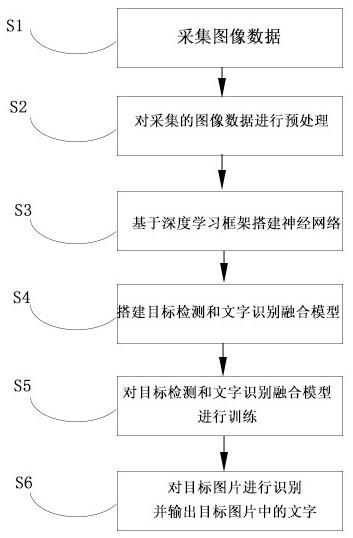
1.一种端到端的智能识别里程表图片的方法,其特征在于,所述方法的步骤包括:s1,采集图像数据;s2,对采集的图像数据进行预处理;s3,基于深度学习框架搭建神经网络;s4,搭建目标检测和文字识别融合模型;s5,对所述目标检测和文字识别融合模型进行训练;s6,对目标图片进行识别并输出所述目标图片中的文字。2.根据权利要求1所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s2的子步骤包括:s21,对所述采集的图像数据进行灰度化处理;s22,对所述采集的图像数据进行二值化处理;s23,对所述采集的图像数据进行降噪处理;s24,对所述采集的图像数据进行倾斜矫正;s25,对所述采集的图像数据进行图像特征提取;s26,对提取的图像特征进行降维。3.根据权利要求1所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s3的子步骤包括:s31,基于深度学习框架搭建所述神经网络基础架构;s32,设计所述神经网络的激活函数;s33,对所述神经网络进行正则化;s34,使用优化器对所述神经网络进行优化;s35,设计所述神经网络的损失函数;s36,确定所述神经网络的评价指标;所述的深度学习框架包括tensorflow;所述激活函数包括relu激活函数和softmax激活函数;对所述神经网络进行正则化的方法包括对所述神经网络进行dropout优化操作;所述优化器包括adam优化器;所述损失函数包括sparse_categorical_crossentropy损失函数;所述评价指标包括f1-score。4.根据权利要求1所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s4的子步骤包括:s41,设置所述目标检测和文字识别融合模型超参数;s42,加载步骤s3搭建的神经网络;s43,加载预训练模型;所述超参数包括学习率、batch-size,所述超参数加载至配置文件中。5.根据权利要求4所述的一种端到端的智能识别里程表图片的方法,其特征在于,所述预训练模型包括在自然图像上预训练过的文字识别模型。6.根据权利要求5所述的一种端到端的智能识别里程表图片的方法,其特征在于,所述文字识别模型包括paddleocr。
7.根据权利要求1所述的一种端到端的智能识别里程表图片的方法,其特征在于,所述目标检测和文字识别融合模型通过yolo目标检测模型实现目标检测。8.根据权利要求5所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s5中使用仪表图片对所述在自然图像上预训练过的文字识别模型在gpu环境下进行再次训练。9.根据权利要求2所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s25中使用ai图像识别技术提取采集的仪表图像数据深层语义特征。10.根据权利要求2所述的一种端到端的智能识别里程表图片的方法,其特征在于,步骤s21中对所述采集的图像数据进行灰度化处理的方法包括分量法、最大值法、平均值法、加权平均法;步骤s22中对所述采集的图像数据进行二值化处理的方法包括双峰法、p参数法、迭代法和otsu法;步骤s23中对所述采集的图像数据进行降噪处理的方法包括均值滤波器降噪、自适应维纳滤波器降噪、中值滤波器降噪、形态学噪声滤除器降噪、小波降噪;步骤s24中对所述采集的图像数据进行倾斜矫正的方法包括霍夫变换法;步骤s25中使用ai图像识别技术提取采集的仪表图像数据深层语义特征。
技术总结
本发明公开了一种端到端的智能识别里程表图片的方法,属于图像识别技术领域,解决了现有技术中的核对里程信息的工作耗费大量人力,容易出错且效率低的技术问题。它包括S1,采集图像数据;S2,对采集的图像数据进行预处理;S3,基于深度学习框架搭建神经网络;S4,搭建目标检测和文字识别融合模型;S5,对所述目标检测和文字识别融合模型进行训练;S6,对目标图片进行识别并输出所述目标图片中的文字。本发明使用自训练的Yolo目标检测模型和PaddleOCR文字识别模型相结合的方式,采用tensorflow框架,集成于tensorflow服务中。本发明实现了智能识别索赔里程图像中的信息,识别稳定、效率高,易操作,减轻了人工工作量,降低了欺诈风险,保障了车辆的高质量索赔。保障了车辆的高质量索赔。保障了车辆的高质量索赔。
技术研发人员:杜阿卫 朱洪霖
受保护的技术使用者:启明信息技术股份有限公司
技术研发日:2022.09.19
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。