1.本发明涉及炮弹报靶技术领域,特别涉及一种单发炮弹报靶方法、系统及计算机存储介质。
背景技术:
2.实弹训练是军队中必要的训练科目,而报靶是实弹训练中的重要环节,精确的报靶能够提升军队训练的效果,反映军队在技能学习中不足。
3.轻武器的报靶需要观察人员在射手同侧通过光学设备对靶标进行观测报靶,安全性较高,而重武器特别是在空军的空对地炮弹训练中,炮弹由高速飞行的飞机投放,无法通过直接观察的方式对投弹结果进行报靶,所以传统的空对地炮弹报靶是在标靶所在的目标区域设立固定的观察岗哨让观察员入驻,观察汇报飞机飞行轨迹和炮弹落点,这种方法需要观察员在训练时进驻到标靶所在的目标区域的观察岗哨,通过人工观察的方式识别高速飞行弹体的落点位置,非常困难,需要大量实践才能掌握,而且观察员本身也承受非常高的风险,危险程度很高。
技术实现要素:
4.本发明实施例提供了一种单发炮弹报靶方法、系统及计算机存储介质,用以解决现有技术中观察员工作内容危险、准确描述炮弹下落轨迹困难的问题。
5.一方面,本发明实施例提供了一种单发炮弹报靶方法,包括:
6.建立虚拟靶标模型;
7.确定所述虚拟靶标模型的透视图和正交视图,并确定所述透视图和正交视图之间的投影变换矩阵和比例换算系数;
8.获取炮弹落点图像,所述炮弹落点图像中具有单发炮弹落点
9.提取所述炮弹落点图像中单发炮弹落点的爆炸特征;
10.确定所述爆炸特征在所述炮弹落点图像中的透视像素坐标;
11.根据像素坐标进行转换,得到相应的正交像素坐标;
12.根据所述比例换算系数对所述正交像素坐标进行矫正,获得炮弹落点的实际坐标。
13.在一种可能的实现方式中,还包括:获取炮弹在空中时刻的飞行图像;利用所述投影变换矩阵对所述飞行图像进行转换,确定炮弹像素坐标;根据拍摄位置和炮弹像素坐标确定直线方程;根据所述直线方程确定炮弹的实际坐标;利用多个所述实际坐标拟合得到炮弹的近地段轨迹。
14.在一种可能的实现方式中,所述建立虚拟靶标模型,包括:采用笛卡尔坐标系建立所述虚拟靶标模型。
15.在一种可能的实现方式中,所述虚拟靶标模型的透视图和正交视图根据垂直视场角、靶标中心坐标和拍摄相机坐标确定,其中垂直视场角根据所述拍摄相机的焦距和传感
器高度确定。
16.在一种可能的实现方式中,所述获取炮弹落点图像,包括:部署所述拍摄相机到与建立虚拟靶标模型时相同的位置和角度;拍摄炮弹落地视频;对拍摄的炮弹落地视频进行抽帧处理,获得所述炮弹落点图像。
17.在一种可能的实现方式中,所述爆炸特征为火焰特征,所述提取所述炮弹落点图像中的爆炸特征包括:读取所述炮弹落点图像,计算相邻帧炮弹落点图像之间的差分图像dn;对所述差分图像dn进行二值化处理,获得二值图像rn;对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc);确定所述炮弹落点图像在所述范围[(xi,yi)]内的火焰颜色特征;确定所述火焰颜色特征的面积a是否达到面积阈值;当所述火焰颜色特征的面积a达到面积阈值时,确定所述炮弹落点图像中的爆炸特征的中心为所述形心(xc,yc);确定所述炮弹落点图像火焰的颜色特征达到面积阈值;确定所述炮弹落点图像火焰的颜色特征中心像素坐标(xc,yc)。
[0018]
在一种可能的实现方式中,所述爆炸特征为烟雾特征,所述提取所述炮弹落点图像中的爆炸特征包括:读取所述炮弹落点图像,计算相邻帧炮弹落点图像之间的差分图像dn;对所述差分图像dn进行二值化处理,获得二值图像rn;对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc);确定所述炮弹落点图像在所述范围[(xi,yi)]内的烟雾特征;确定所述烟雾特征的面积a是否达到面积阈值;当所述烟雾特征的面积a达到面积阈值时,确定所述炮弹落点图像中的爆炸特征的中心为所述形心(xc,yc)。
[0019]
另一方面,本发明实施例提供了一种单发炮弹报靶系统,包括:
[0020]
模型建立模块,用于建立虚拟靶标模型;
[0021]
运算转换模块,用于确定所述虚拟靶标模型的透视图和正交视图,并确定所述透视图和正交视图之间的投影变换矩阵和比例换算系数;
[0022]
现场采集模块,用于获取炮弹落点图像;
[0023]
图像抽取模块,用于提取所述炮弹落点图像中的爆炸特征;
[0024]
图像分析模块,用于确定所述爆炸特征在所述炮弹落点图像中的透视像素坐标;
[0025]
虚拟转换模块,用于根据所述投影变换矩阵对所述透视像素坐标进行转换,得到相应的正交像素坐标;
[0026]
图像矫正模块,用于根据所述比例换算系数对所述正交像素坐标进行矫正,获得炮弹落点的实际坐标。
[0027]
另一方面,本发明实施例提供了一种计算机存储介质,所述计算机存储介质中存储有多条计算机指令,所述多条计算机指令用于使计算机执行上述的方法。
[0028]
本发明中的一种炮弹报靶方法、系统及计算机存储介质,具有以下优点:
[0029]
(1)不需要观察员进驻标靶所在目标区域,提升了报靶的安全性。
[0030]
(2)可以通过数据和计算得出炮弹近地段飞行轨迹,增强训练效果。
[0031]
(3)不需要设置固定观察岗哨,节约成本。
附图说明
[0032]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0033]
图1为本发明实施例提供的一种单发炮弹报靶方法的流程图;
[0034]
图2为本发明实施例提供的虚拟标靶模型的透视图;
[0035]
图3为本发明实施例提供的虚拟标靶模型的正交图;
[0036]
图4为本发明实施例提供的单发炮弹近地段轨迹拟合结果的示意图。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
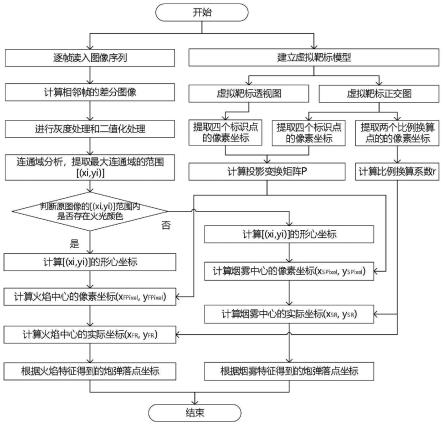
图1为本发明实施例提供的一种单发炮弹报靶方法的流程图。本发明实施例提供了一种单发炮弹报靶方法,包括:
[0039]
建立虚拟靶标模型;
[0040]
确定所述虚拟靶标模型的透视图和正交视图,并确定所述透视图和正交视图之间的投影变换矩阵和比例换算系数;
[0041]
获取炮弹落点图像,所述炮弹落点图像中具有单发炮弹落点
[0042]
提取所述炮弹落点图像中单发炮弹落点的爆炸特征;
[0043]
确定所述爆炸特征在所述炮弹落点图像中的透视像素坐标;
[0044]
根据像素坐标进行转换,得到相应的正交像素坐标;
[0045]
根据所述比例换算系数对所述正交像素坐标进行矫正,获得炮弹落点的实际坐标。
[0046]
示例性地,所述建立虚拟靶标模型,需要部署带有光电吊舱的无人机飞到靶标附近,调整无人机的位置和光电吊舱的偏航角与俯仰角,使整个靶标出现在所述光电吊舱内置的拍摄相机的图像视野的中部位置,并记录所述光电吊舱距离靶标中心的各项数据,根据所述光电吊舱纪录的数据建立虚拟靶标模型。
[0047]
所述确定所述虚拟靶标模型的透视图和正交视图,并确定所述透视图和正交视图之间的投影变换矩阵和比例换算系数,需要在所述虚拟靶标模型上设置标识点、比例换算点和虚拟靶标中心“十”线,然后通过所述标识点、比例换算点和虚拟靶标中心“十”线坐标绘制标靶范围,最后根据靶标中心坐标、拍摄相机坐标和垂直视场角确定所述虚拟靶标模型的透视图和正交视图,通过所述标识点、比例换算点和虚拟靶标中心“十”线坐标算出投影变换矩阵和比例换算系数,如图2和图3所示。
[0048]
所述获取炮弹落点图像,需要再次部署带有光电吊舱的无人机飞到靶标附近,获取炮弹落地前后的视频信息,并进行抽帧处理,得到所述炮弹落点图像。
[0049]
提取所述炮弹落点图像中的爆炸特征,需要分析所述炮弹落点图像,寻找所述炮弹落地时产生的火焰特征和烟雾特征,组合获得所述弹落点图像中的爆炸特征。
[0050]
所述根据像素坐标进行转换,得到相应的正交像素坐标,需要对得到的所述爆炸
特征的中心点像素坐标进行转换,得到所述爆炸特征的中心点像素坐标在所述虚拟靶标模型的正交视图中的正交像素坐标。
[0051]
所述根据所述比例换算系数对所述正交像素坐标进行矫正,获得炮弹落点的实际坐标,需要将得到的所述正交像素坐标与所述比例换算系数相结合,得出炮弹落点的实际坐标。
[0052]
在一种可能的实施例中,还包括:获取炮弹在空中时刻的飞行图像;利用所述投影变换矩阵对所述飞行图像进行转换,确定炮弹像素坐标;根据拍摄位置和炮弹像素坐标确定直线方程;根据所述直线方程确定炮弹的实际坐标;利用多个所述实际坐标拟合得到炮弹的近地段轨迹。
[0053]
示例性地,所述获取炮弹在空中时刻的飞行图像,需要对所述拍摄相机纪录的炮弹飞行录像进行抽帧处理。
[0054]
所述利用所述投影变换矩阵对所述飞行图像进行转换,确定炮弹像素坐标,需要对抽出的所述飞行图像进行转换,得到所述炮弹像素坐标。
[0055]
所述根据拍摄位置和炮弹像素坐标确定直线方程,需要通过所述炮弹的像素坐标和所述拍摄相机的位置坐标确定两者之间的直线方程。
[0056]
所述根据所述直线方程确定炮弹的实际坐标,需要联立所述飞机飞行铅垂面内的直线方程和炮弹与拍摄相机的直线方程得出所述炮弹在空中的具体坐标。
[0057]
所述利用多个所述实际坐标拟合得到炮弹的近地段轨迹,需要在多张炮弹飞行画面中计算出的多个所述炮弹空中坐标,然后通过曲线拟合的方式将多个所述炮弹空中坐标拟合成一条三维曲线,所述三维曲线就是所述炮弹的近地端轨迹,如图4所示。
[0058]
在一种可能的实施例中,所述建立虚拟靶标模型,包括:采用笛卡尔坐标系建立所述虚拟靶标模型。
[0059]
示例性地,所述采用笛卡尔坐标系建立所述虚拟靶标模型,需要事先部署无人机对目标区域地形进行扫描,然后确定所述目标区域的虚拟靶标图像,最后设置虚拟靶标模型图像的分辨率为w*h,即水平像素数为w、垂直像素数为h并使用笛卡尔坐标系绘制虚拟靶标模型。
[0060]
在一种可能的实施例中,所述虚拟靶标模型的透视图和正交视图根据垂直视场角、靶标中心坐标和拍摄相机坐标确定,其中垂直视场角根据所述拍摄相机的焦距和传感器高度确定。
[0061]
示例性地,所述虚拟靶标模型的透视图和正交视图根据垂直视场角、靶标中心坐标和拍摄相机坐标确定,其中垂直视场角根据所述拍摄相机的焦距和传感器高度确定,需要确定所述无人机的光电吊舱距离靶标中心的相对坐标(xcam,ycam,zcam)、相机镜头的焦距f、光电吊舱的偏航角α、光电吊舱的俯视角β,根据所述拍摄相机的ccd传感器的高度h
ccd
和公式计算出焦距f对应的垂直视场角;
[0062]
所述虚拟靶标模型的透视图和正交视图,需要先将所述笛卡尔坐标系的原点作为靶标中心,即靶标中心为(0,0),并与图像的中心重合,然后绘制虚拟靶标中心的“十”线,“十”线的上下左右四个端点坐标分别为(x1,0)、(x2,0)、(0,y3)、(0,y4),接着绘制四个圆形的标识点,第一标志点坐标为(lr,0)、第二标志点坐标为(-lr,0)、第三标志点坐标为(0,
lr)、第四标志点坐标为(0,-lr),绘制两个圆形的比例换算点,第一比例换算点坐标为(ls,0),第二比例换算点坐标为(-ls,0),然后设真实靶标上的最远点到靶标中心的距离为r,以坐标原点为中心,绘制半径为r的圆,最后将所得坐标数据参数赋值给模拟软件,即将所述靶标中心坐标赋值给ax.cameratarget、所述拍摄相机的坐标赋值给ax.cameraposition、所述垂直视场角赋值给ax.cameraviewangle,并设置camproj(
‘
perspective’),使软件生成虚拟靶标模型的透视图,将所述靶标中心坐标赋值给ax.cameratarget、所述拍摄相机的坐标赋值给ax.cameraposition、所述垂直视场角赋值给ax.cameraviewangle,并设置camproj(
‘
orthographic’),生成虚拟靶标模型的正交视图。
[0063]
在一种可能的实现方式中,所述获取炮弹落点图像,包括:部署所述拍摄相机到与建立虚拟靶标模型时相同的位置和角度;拍摄炮弹落地视频;对拍摄的炮弹落地视频进行抽帧处理,获得所述炮弹落点图像。
[0064]
示例性的,所述部署所述拍摄相机到与获取目标地形图像时相同的位置和角度,需要将所述无人机部署到与所述获取目标地形图像时相同的位置,然后调整所述无人机的光电吊舱,使所述拍摄相机距离靶标中心的相对坐标为(xcam,ycam,zcam)、相机镜头的焦距为f、光电吊舱的偏航角为α、光电吊舱的俯视角为β。
[0065]
所述拍摄炮弹落地彩色视频,需要所述无人机在所述获取目标地形图像时相同的位置拍摄炮弹落地前后的彩色视频。
[0066]
所述对拍摄的炮弹落地视频进行抽帧处理,需要对拍摄的所述炮弹落地视频等差抽帧以获取图像序列。
[0067]
在一种可能炮弹落地的实施例中,所述爆炸特征为火焰特征,所述提取所述炮弹落点图像中的爆炸特征包括:读取所述炮弹落点图像,计算相邻帧炮弹落点图像之间的差分图像dn;对所述差分图像dn进行二值化处理,获得二值图像rn;对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc);确定所述炮弹落点图像在所述范围[(xi,yi)]内的火焰颜色特征;确定所述火焰颜色特征的面积a是否达到面积阈值;当所述火焰颜色特征的面积a达到面积阈值时,确定所述炮弹落点图像中的爆炸特征的中心为所述形心(xc,yc)。
[0068]
示例性的,所述读取所述炮弹落点图像,计算差分图像dn,需要逐帧读取所述抽帧得到的图像序列,计算第n帧图像fn和第n-1帧图像fn-1的差分图像dn;
[0069]
所述对所述差分图像dn进行处理,确定二值图像rn,需要对dn做灰度处理和二值处理,得到二值图像rn。
[0070]
所述对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc),需要通过软件对二值图像rn经行连通域分析,获得所需数据。
[0071]
所述确定所述炮弹落点图像的[(xi,yi)]范围内的火焰的颜色特征,需要分析所述炮弹落点图像的颜色特征,寻找火焰颜色。
[0072]
所述确定所述炮弹落点图像火焰的颜色特征达到面积阈值,需要将确定有火焰颜色特征的图片抽出,对所述火焰颜色特征判断,确定所述火焰的颜色特征面积a达到了火焰的面积阈值t1,确认所述图像fn中存在炮弹落地瞬间产生的火焰。
[0073]
所述确定所述炮弹落点图像火焰的颜色特征中心像素坐标(xc,yc),需要计算所述图像fn中所述火焰的颜色特征面积a,确定火焰中心的像素坐标为(xc,yc),即炮弹落点的像
素坐标为(xc,yc)。
[0074]
在一种可能炮弹落地的实施例中,所述爆炸特征为烟雾特征,所述提取所述炮弹落点图像中的爆炸特征包括:读取所述炮弹落点图像,计算相邻帧炮弹落点图像之间的差分图像dn;对所述差分图像dn进行二值化处理,获得二值图像rn;对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc);确定所述炮弹落点图像在所述范围[(xi,yi)]内的烟雾特征;确定所述烟雾特征的面积a是否达到面积阈值;当所述烟雾特征的面积a达到面积阈值时,确定所述炮弹落点图像中的爆炸特征的中心为所述形心(xc,yc)。
[0075]
示例性的,所述读取所述炮弹落点图像,计算差分图像dn,需要逐帧读取所述抽帧得到的图像序列,对连续m帧图像[fn-1fn fn 1fn 2
…
fn m-2]计算差分图像dn。
[0076]
所述对所述差分图像dn进行处理,确定二值图像rn,需要对dn做灰度处理和二值处理,得到二值图像rn。
[0077]
所述对所述二值图像rn进行连通域分析,确定最大连通域的范围[(xi,yi)]、面积a和形心(xc,yc),需要通过软件对二值图像rn经行连通域分析,获得所需数据。
[0078]
所述确定所述炮弹落点图像的[(xi,yi)]范围内的烟雾特征需要,分析所述炮弹落点图像的颜色特征,寻找烟雾特征。
[0079]
所述确定所述炮弹落点图像的烟雾特征达到面积阈值,需要将确定有烟雾特征的图片抽出,对所述烟雾特征判断,确定所述烟雾特征面积a达到了烟雾的面积阈值t2,确认所述图像fn中存在炮弹落地瞬间产生的烟雾。
[0080]
所述确定所述炮弹落点图像的的烟雾特征中心像素坐标(xc,yc),需要计算所述图像fn中所述烟雾特征面积a,图像fn变化区域的形心(xc,yc)即为炮弹落点的像素坐标。
[0081]
本发明实施例还提供了一种炮弹报靶系统,包括:
[0082]
模型建立模块,用于建立虚拟靶标模型;
[0083]
运算转换模块,用于确定所述虚拟靶标模型的透视图和正交视图,并确定所述透视图和正交视图之间的投影变换矩阵和比例换算系数;
[0084]
现场采集模块,用于获取炮弹落点图像;
[0085]
图像抽取模块,用于提取所述炮弹落点图像中的爆炸特征;
[0086]
图像分析模块,用于确定所述爆炸特征在所述炮弹落点图像中的透视像素坐标;
[0087]
虚拟转换模块,用于根据所述投影变换矩阵对所述透视像素坐标进行转换,得到相应的正交像素坐标;
[0088]
图像矫正模块,用于根据所述比例换算系数对所述正交像素坐标进行矫正,获得炮弹落点的实际坐标。
[0089]
本发明实施例还提供了一种计算机存储介质,所述计算机存储介质中存储有多条计算机指令,所述多条计算机指令用于使计算机执行上述的方法。
[0090]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0091]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围
之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。