技术特征:
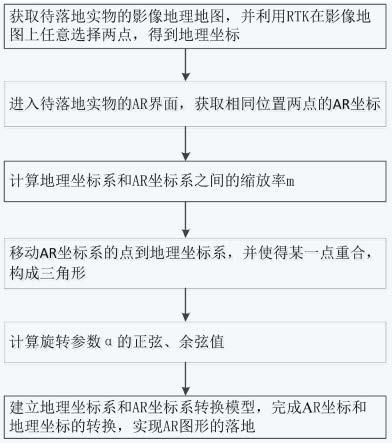
1.一种ar坐标和地理坐标的转换方法,其特征在于,包括以下步骤:s1:获取待落地实物的影像地理地图,并利用rtk在影像地图上任意选择两点,得到第一地理坐标点a(x1,y1,z1)、第二地理坐标点b(x2,y2,z2);再进入待落地实物的ar界面,获取同样两点的ar坐标,记为第一ar坐标点c(x3,y3,z3)、第二ar坐标点d(x4,y4,z4);s2:根据s1中获得的两点地理坐标和ar坐标计算地理坐标系和ar坐标系之间的缩放率m;s3:将ar坐标系的第一ar坐标点c、第二ar坐标点d平行移动到地理坐标系,使第一ar坐标点c与第二地理坐标点b重合,构成三角形abd’;s4:计算三角形abd’中角abd’,即旋转参数α的正弦、余弦值;s5:建立地理坐标系和ar坐标系转换模型,完成ar坐标和地理坐标的转换,实现ar图形的落地。2.如权利要求1所述的一种ar坐标和地理坐标的转换方法,其特征在于,所述s2中,缩放率m的计算公式为:公式(1)中,(x1,y1,z1)、(x2,y2,z2)表示地理坐标系下两点的地理坐标;(x3,y3,z3)、(x4,y4,z4)表示ar坐标系下相同位置两点的ar坐标。3.如权利要求1所述的一种ar坐标和地理坐标的转换方法,其特征在于,所述s3中,第一ar坐标点c的移动距离为:δx=x
3-x2,δy=y
3-y2,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)公式(2)中,δx表示第一ar坐标点c的x轴移动距离,x3表示第一ar坐标点c的x轴坐标,x2表示第二地理坐标点b的x轴坐标;δy表示第一ar坐标点c的y轴移动距离,y3表示第一ar坐标点c的y轴坐标,y2表示第二地理坐标点b的y轴坐标。4.如权利要求1所述的一种ar坐标和地理坐标的转换方法,其特征在于,所述s3中,第二ar坐标点d的移动距离与第一ar坐标点c的移动距离相同;a点坐标为(x1,y1,z1),b点坐标为(x2,y2,z2),d’点坐标为(x2 x
4-x3,y2 y
4-y3,z2 z
4-z3)。5.如权利要求1所述的一种ar坐标和地理坐标的转换方法,其特征在于,所述s4中,旋转参数α的余弦值计算公式为:旋转参数α的正弦值计算公式为:公式(2)、(3)中,cosα表示旋转参数α的余弦值,sinα表示旋转参数α的正弦值,其中公式(2)、(3)中,cosα表示旋转参数α的余弦值,sinα表示旋转参数α的正弦值,其中公式(2)、(3)中,cosα表示旋转参数α的余弦值,sinα表示旋转参数α的正弦值,其中
6.如权利要求1所述的一种ar坐标和地理坐标的转换方法,其特征在于,所述s4中,地理坐标系和ar坐标系转换模型为:公式(4)中,(x3,y3)表示ar坐标系下的第一ar坐标,δx表示第一ar坐标点c的x轴移动距离,δy表示第一ar坐标点c的y轴移动距离;m表示缩放参数;cosα表示旋转参数α的余弦值,sinα表示旋转参数α的正弦值,(x2,y2)表示地理坐标系下的第二地理坐标。
技术总结
本发明公开一种AR坐标和地理坐标的转换方法,包括S1:获取待落地实物的影像地理地图,并利用RTK在影像地图上任意选择两点,得到第一地理坐标点A、第二地理坐标点B;再进入待落地实物的AR界面,获取同样两点的AR坐标,记为第一AR坐标点C、第二AR坐标点D;S2:根据S1中获得的地理坐标点和AR坐标点计算地理坐标系和AR坐标系之间的缩放率m;S3:将AR坐标系的第一AR坐标点C、第二AR坐标点D平行移动到地理坐标系,使第一AR坐标点C与第二地理坐标点B重合,构成三角形ABD’;S4:计算三角形ABD’中即旋转参数α的正弦、余弦值;S5:建立地理坐标系和AR坐标系转换模型,完成AR坐标和地理坐标的转换。换。换。
技术研发人员:张茗 蒲丽全 高文清 康茂林 王秋艳
受保护的技术使用者:重庆宝图科技发展有限公司
技术研发日:2022.09.14
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。