技术特征:
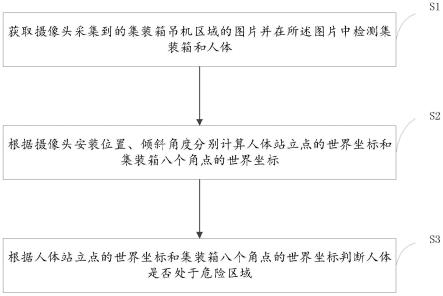
1.一种集装箱吊机危险区域检测方法,其特征在于,包括:获取摄像头采集到的集装箱吊机区域的图片并在所述图片中检测集装箱和人体;根据摄像头安装位置、倾斜角度分别计算人体站立点的世界坐标和集装箱八个角点的世界坐标;根据人体站立点的世界坐标和集装箱八个角点的世界坐标判断人体是否处于危险区域。2.如权利要求1所述的集装箱吊机危险区域检测方法,其特征在于,采用yolox集装箱图像识别模型来检测图片中的集装箱,采用yolox人体图像识别模型来检测图片中的人体。3.如权利要求1所述的集装箱吊机危险区域检测方法,其特征在于,人体站立点的世界坐标(xw,yw,zw)的计算方式如下:xw=h/sin(∠a ∠b),yw=(x/f)*(h*sin(∠a ∠b)),zw=0,其中,∠b=arctan(y/f),(x,y)为人体站立点在图像坐标系中的坐标,∠a为摄像头的倾斜角度,f为摄像头的焦距,h为摄像头的高度,地面被设定为第一世界坐标系的zw轴零点平面。4.如权利要求3所述的集装箱吊机危险区域检测方法,其特征在于,检测集装箱八个角点的世界坐标,包括:假设集装箱的底面或者顶面为第二世界坐标系的zw’轴零点平面,摄像头所在的zw’轴高度为h’;分别根据图像坐标系中的坐标计算出zw’轴零点平面上靠近摄像头的一面的两个角点的在第二世界坐标系中的世界坐标;根据所述两个角点在第二世界坐标系中的世界坐标计算出所述两个角点的实际距离,并求解出摄像头所在的zw’轴高度h’,根据摄像头所在的zw’轴高度h’与摄像头的实际高度h之间的差值计算出第二世界坐标系的zw’轴与第一世界坐标系的zw轴之间的差值,并将所述两个角点的世界坐标换算为第一世界坐标系中的坐标;根据集装箱的尺寸推算出集装箱其它角点在第一世界坐标系中的坐标。5.如权利要求1所述的集装箱吊机危险区域检测方法,其特征在于,根据人体站立点的世界坐标和集装箱八个角点的世界坐标判断人体是否处于危险区域,包括:根据集装箱八个角点的世界坐标和人体站立点的世界坐标计算集装箱的底面四条边与人体站立点的距离;根据集装箱的底面四条边与人体站立点的距离来判断人体是否在危险区域,若集装箱的底面四条边与人体站立点的距离都大于设定的阈值,判断人体处于安全区域,否则判断人体处于危险区域。6.一种集装箱吊机危险区域检测系统,其特征在于,包括:摄像头,用于采集集装箱吊机区域的图片;图像识别模块,用于在所述摄像头采集到的图片中检测集装箱和人体;坐标转换模块,用于根据所述摄像头的安装位置、倾斜角度来计算人体站立点的世界坐标和集装箱八个角点的世界坐标;
判断模块,根据人体站立点的世界坐标和集装箱八个角点的世界坐标判断人体是否处于危险区域。7.如权利要求6所述的集装箱吊机危险区域检测系统,其特征在于,所述图像识别模块采用yolox集装箱图像识别模型来检测图片中的集装箱,所述图像识别模块采用yolox人体图像识别模型来检测图片中的人体。8.如权利要求6所述的集装箱吊机危险区域检测系统,其特征在于,所述坐标转换模块计算人体站立点的世界坐标(xw,yw,zw)的方式如下:xw=h/sin(∠a ∠b),yw=(x/f)*(h*sin(∠a ∠b)),zw=0,其中,∠b=arctan(y/f),(x,y)为人体站立点在图像坐标系中的坐标,∠a为摄像头的倾斜角度,f为摄像头的焦距,h为摄像头的高度,地面被设定为第一世界坐标系的zw轴零点平面。9.如权利要求8所述的集装箱吊机危险区域检测系统,其特征在于,所述坐标转换模块计算集装箱八个角点的世界坐标的过程包括:假设集装箱的底面或者顶面为第二世界坐标系的zw’轴零点平面,摄像头所在的zw’轴高度为h’;分别根据图像坐标系中的坐标计算出zw’轴零点平面上靠近摄像头的一面的两个角点在第二世界坐标系的世界坐标;根据所述两个角点在第二世界坐标系的世界坐标计算出所述两个角点的实际距离,并求解出摄像头所在的zw’轴高度h’,根据摄像头所在的zw’轴高度h’与摄像头的实际高度h之间的差值计算出第二世界坐标系的zw’轴与第一世界坐标系的zw轴之间的差值,并将所述两个角点的世界坐标换算为第一世界坐标系中的坐标;根据集装箱的尺寸推算出集装箱其它角点在第一世界坐标系中的坐标。10.如权利要求1所述的集装箱吊机危险区域检测系统,其特征在于,所述判断模块判断人体是否处于危险区域的过程包括:根据集装箱八个角点的世界坐标和人体站立点的世界坐标计算集装箱的底面四条边与人体站立点的距离;根据集装箱的底面四条边与人体站立点的距离来判断人体是否在危险区域,若集装箱的底面四条边与人体站立点的距离都大于设定的阈值,判断人体处于安全区域,否则判断人体处于危险区域。
技术总结
本发明提供了一种集装箱吊机危险区域检测方法及系统,所述方法包括:获取摄像头采集到的集装箱吊机区域的图片并在所述图片中检测集装箱和人体;根据摄像头安装位置、倾斜角度分别计算人体站立点的世界坐标和集装箱八个角点的世界坐标;根据集装箱八个角点的世界坐标和人体站立点的世界坐标判断人体是否在危险区域。采用本发明的技术方案,可在吊装高度调整的情况下准确地判断人体是否处于危险区域。区域。区域。
技术研发人员:朱光强 王和平 赖时伍 罗富章
受保护的技术使用者:盛视科技股份有限公司
技术研发日:2022.08.01
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。