1.本发明涉及铁道工程技术领域,具体涉及一种真空管磁浮交通线路线形设计优化方法。
背景技术:
2.真空管超高速磁浮交通系统利用真空环境和超声速外形减小空气阻力,通过磁浮减小摩擦阻力,理论上可实现超声速运行。超高速真空磁浮交通系统具有超高速、高安全、低能耗、噪声小、污染小等特点,是当前国内外研究的热点和趋势,未来具有广阔发展前景。目前从国内外真空管道交通技术方案来看,主要有采用电磁悬浮的瑞士swissmetro方案、采用永磁悬浮的美国hyperloop系统和采用高温超导磁浮技术的西南交通大学方案。值得指出的是,目前对管道线路工程技术的研究主要集中在承载结构方面,对线形设置及线形优化方面还缺乏系统分析。
3.目前已建立了时速600公里及以下高速常导磁浮交通线路设计体系,制定了相应的磁浮交通设计规范和技术规格书,线路设计方法和参数取值依据舒适性和常导悬浮导向特点来确定,综合考虑舒适性和安全性优化设计方案。对于运行时速高达1000km/h真空管磁浮交通而言,行车安全、运行舒适性等方面要求将显著不同,现有线路设计方法和参数取值无法满足超高速真空管磁浮交通系统要求,该方面还存在空白。
技术实现要素:
4.本发明的目的是提供一种真空管磁浮交通线路线形设计优化方法,以解决现有技术方法无法满足超高速真空管磁浮交通线路设计要求的问题。
5.为了达到上述目的,本发明所采用的技术方案为:
6.真空管磁浮交通线路线形设计优化方法,所述线形包括直线、圆曲线、缓和曲线,拟定若干线形组合作为设计方案,所述线形组合包括连续的不同线形;
7.所述方法包括:
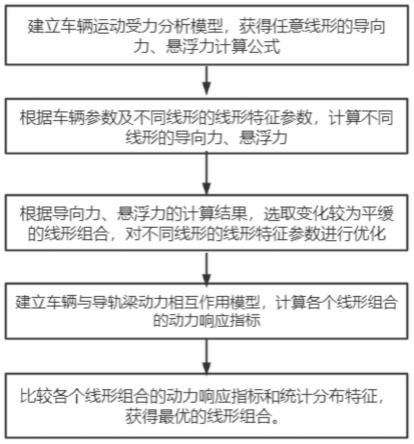
8.建立车辆运动受力分析模型,获得任意线形的导向力、悬浮力计算公式;
9.根据车辆参数及不同线形的线形特征参数,计算不同线形的导向力、悬浮力;
10.根据导向力、悬浮力的计算结果,选取变化较为平缓的线形组合,对不同线形的线形特征参数进行优化;
11.建立车辆与导轨梁动力相互作用模型,计算各个线形组合的动力响应指标;
12.比较各个线形组合的动力响应指标和统计分布特征,获得最优的线形组合。
13.进一步地,建立车辆运动受力分析模型,获得任意线形的导向力、悬浮力计算公式,包括:
14.将车辆简化为绕前进方向纵轴转动的刚体,由质心运动定理及对质心的动量矩定理可得车辆运动受力分析模型,根据车辆运动受力分析模型推导出导向力、悬浮力计算公式。
15.进一步地,导向力计算公式为:
[0016][0017]
悬浮力计算公式为:
[0018][0019][0020]
式中:
[0021]
fd为轮对所受沿轨顶面的侧向导向力;
[0022]
m为整车质量;
[0023]
d为质心到轨顶面的距离;
[0024]
h为实设超高值;
[0025]rs
为竖曲线半径;
[0026]ks
为竖曲线曲率;
[0027]
g为重力加速度;
[0028]
s为轨距;
[0029]kp
为平面曲线曲率;
[0030]
v为车辆行驶速度;
[0031]fc1
、f
c2
为内、外侧车轮所受垂直于轨顶面的悬浮力;
[0032]
ρ0为整车对质心的惯性半径。
[0033]
进一步地,根据导向力、悬浮力的计算结果,选取变化较为平缓的线形组合,对不同线形的线形特征参数进行优化,包括:
[0034]
选取变化较为平缓的线形组合;
[0035]
由导向力和悬浮力的固定阈值,反算得到圆曲线半径、缓和曲线长度的取值,实现线形特征参数的优化。
[0036]
进一步地,车辆与导轨梁动力相互作用模型包括车辆动力学模型和导轨梁动力学模型;
[0037]
将车体、转向架、磁铁装置均考虑为刚体,悬挂系统近似为弹簧阻尼元件,每个刚体考虑沉浮、点头、横移、摇头及侧滚运动,基于多刚体动力学理论建立车辆运动方程,并考虑线形和轨道不平顺产生的附加力作用,得到车辆动力学模型;
[0038]
在考虑结构参振影响基础上采用模态法或有限元法建立梁振动方程,得到导轨梁动力学模型;
[0039]
基于试验和磁场分析建立悬浮间隙与悬浮力之间、以及导向间隙与导向力之间的数学关系,将车辆动力学模型与导轨梁动力学模型联系起来,车辆与导轨动力相互作用系统运动方程采用交叉迭代的数值积分进行求解,从而得到车辆与导轨梁动力相互作用模型。
[0040]
进一步地,计算各个线形组合的动力响应指标,包括:
[0041]
运用车辆与导轨梁动力相互作用模型,计算各个线形组合的动力响应指标,动力
响应指标包括车体振动加速度、悬浮力、导向力、悬浮间隙、导向间隙、导轨梁变形、导轨梁振动加速度。
[0042]
进一步地,比较各个线形组合的动力响应指标和统计分布特征,获得最优的线形组合,包括:
[0043]
统计分析各个线形组合的动力响应指标时程结果,得到组合中不同区段各指标的统计分布特征,包括最值、平均值、标准差、99%概率值、95%概率值;
[0044]
比较各个线形组合的动力响应指标和统计分布特征,将统计分布特征值最小、动力性能最好的线形组合作为最优的线形组合。
[0045]
与现有技术相比,本发明的有益效果如下:
[0046]
使用本方法确定的超高速真空管磁浮交通线路设计方案,能准确考虑超高速运行条件下舒适性和安全性变化规律,实现真空管磁浮交通线路参数确定和设计方案优化,为超高速真空管磁浮交通工程化应用提供保障。
附图说明
[0047]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他实施例的附图。
[0048]
图1为曲线地段车辆受力分析图。
[0049]
图2为车辆与导轨梁动力相互作用模型侧视图。
[0050]
图3为车辆与导轨梁动力相互作用模型横断面图。
[0051]
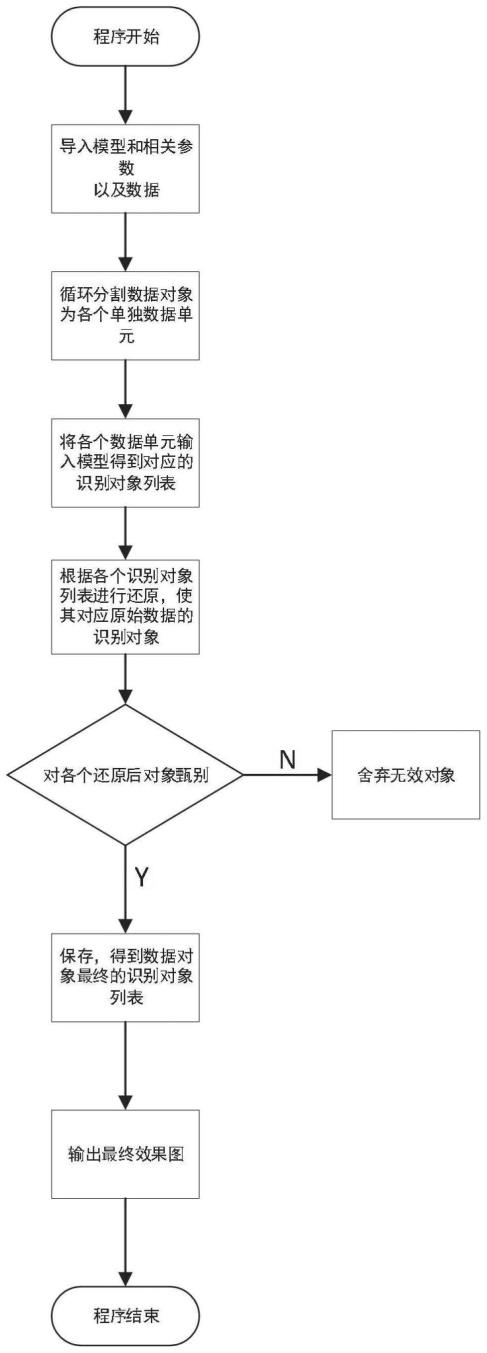
图4为本发明的方法流程图。
[0052]
图5为实施例2的线路平断面设计图。
[0053]
图6为实施例2的纵断面设计图。
[0054]
图7为实施例2方案1的时程曲线图。
[0055]
图8为实施例2方案2的时程曲线图。
[0056]
图9为实施例2方案3的时程曲线图。
[0057]
图10为三种方案的统计数据比较图。
具体实施方式
[0058]
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
[0059]
应注意到,相似的标号和字母表示类似项,因此,一旦某一项在一个实施例中被定义,则在随后的实施例中不需要对其进行进一步定义和解释。同时,术语“包括”和“具有”等以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0060]
真空管道线路工程必须具备很高的安全性、密封性、可靠性,线路线形设置与真空管道磁浮交通系统的承载结构形式密切相关,总体来看,线路线形具有如下特点:(1)真空管超高速磁浮线路结构需满足1000km/h速度级列车运行要求,线路承载结构在制造、安装及维护过程中需达到很高的精度,必须严格控制线路平顺性和结构变形。(2)列车通过悬浮力和导向力直接作用在线路承载梁上,线形的变化能更加清晰地体现在承载结构上,线形引起的加速度和冲击将愈加显著。(3)高精度的制造和定位技术使得复杂线形在承载结构上的实现和运行维护成为可能。
[0061]
真空管磁浮交通线路线形设计的关键参数有缓和曲线类型、最小曲线半径、缓和曲线最小长度等。对于运行时速高达1000km/h真空管磁浮交通而言,行车安全、运行舒适性等方面要求将显著提高,现有轮轨铁路线路设计方法和参数取值无法满足超高速真空管磁浮交通系统要求,该方面还存在空白。
[0062]
实施例1:
[0063]
本实施例提供了一种真空管磁浮交通线路线形设计优化方法,所述线形包括直线、圆曲线、缓和曲线,拟定若干线形组合作为设计方案,所述线形组合包括连续的不同线形。在进行线路设计时应以线路顺直为前提,力争设置较长的直线段,以缩短线路长度,改善运行条件。但为了适应地形,绕避地物以减少工程数量和工程投资,必须设置一定长度的圆曲线和缓和曲线。直线具有通视条件好、行驶受力简单、方向明确、便于测设等特征,其特征参数有夹直线最小长度等。圆曲线具有易于与地形相适应、线形美观、易于测设等特征,其特征参数有最小曲线半径、曲线长度等。缓和曲线具有曲率变化连续、离心加速度逐渐变化、超高及加宽逐渐变化等特征,其特征参数有缓和曲线最小长度、缓和曲线类型等。
[0064]
方法具体包括以下步骤:
[0065]
s1:建立车辆运动受力分析模型,获得任意线形的导向力、悬浮力计算公式。
[0066]
车辆进入缓和曲线后,车辆呈现侧滚、点头、摇头等多种运动姿态。经研究发现车辆在缓和曲线地段点头总角位移与摇头和侧滚总角位移相比量级较小,与车辆摇头运动有关的轮轨力较引起侧滚运动的轮轨力小3个量级,因而可忽略车辆的点头、摇头运动,将车辆简化为绕前进方向纵轴转动的刚体。任意超高速车辆的受力分析如图1所示,规定靠近曲率中心一侧为内侧。
[0067]
将车辆简化为绕前进方向纵轴转动的刚体,由质心运动定理及对质心的动量矩定理可得车辆运动受力分析模型,根据车辆运动受力分析模型推导出导向力、悬浮力计算公式。
[0068]
车辆运动受力分析模型为:
[0069]
mgsinα fd=m(k
p
v2cosα lα”cosθ l(α')2sinθ)
[0070]
mgcosα-f
c1-f
c2
=m(-k
p
v2sinα-lα”sinθ l(α')2cosθ)
[0071][0072]
式中:
[0073]
sinα≈α=hr
sks
/s
[0074]
cosα≈1
[0075]
sinθ=s/(2l)
[0076]
cosθ=d/l
[0077]
α'=hr
sk′s/s
[0078]
α”=hr
sk″s/s
[0079]
式中的车辆参数及线形特征参数包括:
[0080]
m为整车质量;
[0081]
g为重力加速度;
[0082]
α为横坡角;
[0083]
fd为轮对所受沿轨顶面的侧向导向力;
[0084]kp
为平面曲线曲率;
[0085]
v为车辆行驶速度;
[0086]
l为车辆质心o到内侧轮轨接触点连线的距离;
[0087]
θ为车辆质心到内侧轮轨接触点的连线与y轴的夹角;
[0088]fc1
、f
c2
为内、外侧车轮所受垂直于轨顶面的悬浮力;
[0089]
s为轨距;
[0090]
d为质心到轨顶面的距离;
[0091]
ρ0为整车对质心的惯性半径;
[0092]
h为实设超高值;
[0093]rs
为竖曲线半径;
[0094]ks
为竖曲线曲率。
[0095]
对上述模型进行变形和推导,得到:
[0096]
导向力计算公式:
[0097][0098]
悬浮力计算公式:
[0099][0100][0101]
s2:根据车辆参数及不同线形的线形特征参数,计算不同线形的导向力、悬浮力。
[0102]
已知车辆参数及不同线形的线形特征参数,带入步骤s1的相关公式,计算出导向力和悬浮力。
[0103]
s3:根据导向力、悬浮力的计算结果,选取变化较为平缓的线形组合,对不同线形的线形特征参数进行优化。
[0104]
根据力随里程的变化规律,选取变化较为平缓的线形组合,曲线曲率变化连续,无明显突变。
[0105]
由导向力和悬浮力的固定阈值,反算得到圆曲线半径、缓和曲线长度的取值,实现线形特征参数的优化。
[0106]
s4:建立车辆与导轨梁动力相互作用模型,计算各个线形组合的动力响应指标。
[0107]
s401:建立车辆与导轨梁动力相互作用模型,车辆与导轨梁动力相互作用模型包
括车辆动力学模型和导轨梁动力学模型。
[0108]
如图2和图3所示,将车体、转向架、磁铁装置均考虑为刚体,悬挂系统近似为弹簧阻尼元件,每个刚体考虑沉浮、点头、横移、摇头及侧滚运动,基于多刚体动力学理论建立车辆运动方程,并考虑线形和轨道不平顺产生的附加力作用,得到车辆动力学模型。在考虑结构参振影响基础上采用模态法或有限元法建立梁振动方程,得到导轨梁动力学模型。基于试验和磁场分析建立悬浮间隙与悬浮力之间、以及导向间隙与导向力之间的数学关系,将车辆模型与导轨梁模型联系起来,车辆与导轨动力相互作用系统运动方程采用交叉迭代的数值积分进行求解,从而得到车辆与导轨梁动力相互作用模型。
[0109]
s402:计算各个线形组合的动力响应指标,包括:
[0110]
运用车辆与导轨梁动力相互作用模型,计算各个线形组合的动力响应指标,动力响应指标包括车体振动加速度、悬浮力、导向力、悬浮间隙、导向间隙、导轨梁变形、导轨梁振动加速度。
[0111]
s5:比较各个线形组合的动力响应指标和统计分布特征,获得最优的线形组合。
[0112]
统计分析各个线形组合的动力响应指标时程结果,得到组合中不同区段各指标的统计分布特征,包括最值、平均值、标准差、99%概率值、95%概率值;
[0113]
比较各个线形组合的动力响应指标和统计分布特征,将统计分布特征值最小、动力性能最好的线形组合作为最优的线形组合。
[0114]
在获得各个线形组合的动力响应指标和统计分布特征后,以提高舒适度和减少幅值较大动力响应频数分布为目的,可以选取线性组合中动力性能较差区段,确定影响动力响应的敏感线形参数,对敏感线形参数调整形成新的线性组合,然后再次比较各个线形组合的动力响应指标和统计分布特征,如此反复调整比较,取得满意的优化方案。
[0115]
本实施例的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行。
[0116]
实施例2:
[0117]
现有三种不同的线路设计方案,线路平、纵断面设计图如图5和图6所示,不同方案参数设计如表1所示,其中l1为第一条缓和曲线长度,r1为第一条圆曲线半径,l0为夹直线长度,l2为第二条缓和曲线长度,r2为第二条圆曲线半径,l3为直线长度,i为坡度,l为坡段长度。根据不同设计方案,在所建车辆与导轨梁动力相互作用模型中输入直线长度、缓和曲线长度、圆曲线长度和半径、坡度及坡段长度等具体参数值,得出车体垂向加速度、车体横向加速度、悬浮间隙、导向间隙、悬浮力与导向力六项动力响应指标,统计三种方案的动力响应时程结果,时程曲线如图7-9所示,比较不同方案中各指标的最值、平均值、标准差、99%概率值、95%概率值,如图10所示。通过统计数据比较可以看出,方案3与方案1、2相比来说,动力响应指标统计分布特征值最小,动力性能更好。因此,方案3更优。
[0118] l1/mr1/ml0/ml2/mr2/ml3/mi1/
‰
i2/
‰
i3/
‰
方案1500100001000500100001000123方案25001000010001120230001000123方案311202300010001120230001000123
[0119]
圆曲线长度与缓和曲线长度相等,纵断面变坡点均在圆曲线中点处。
[0120]
本发明在较为客观地考虑不同线路条件下乘坐舒适性和安全性的基础上,提出了
基于动力学分析的真空管磁浮交通线路设计方法,具有重要的理论意义和工程实用价值。
[0121]
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。