1.本发明属于智慧灯杆调节技术领域,ipc分类号为:h05b47/11,具体涉及一种基于投影互动的麦克杯智慧灯杆。
背景技术:
2.路灯作为人们日常生活中常见的公共设施,普遍应用于交通,住宅与园区等多种场景中,成为人们日常照明的重要装置。同时随着现阶段智能制造的发展,路灯的设计也逐步向智能化方向发展,通过在智慧路灯上增加多种传感器,用以增设智慧路灯的功能,从而更加丰富了人们的日常生活。但是目前智慧路灯的功能多偏向于交通信息处理领域,而忽略了路灯自身的照明效率与用户使用的体验度,从而导致智慧路灯更像是一个交通管理装置,而降低了其原本的使用功能。
3.专利cn202010367599提供了一种基于智慧灯杆的高速公路交通预警方法、装置和系统,此智慧灯杆通过采集指定区域内的交通路况信息,用以进行指定区域内的交通异常数据预警,从而进行路况监测的同时保证交通路况的安全。但是此专利中进行交通数据的采集与处理,与传统的交通管理装置的功能有所相同。
4.专利cn202210119576提供了一种基于智慧灯杆的高速公路智能投影警示系统,此专利首先采集事故车的投影图片,并在事故车200米的位置投影事故影像进行事故提醒与后车预警,但是行车过程中对视野的要求很高,如果突然增设投影图像将会影响后车的行车安全。
5.因此,针对现有的智慧灯杆中存在的问题,本发明提供了一种基于投影互动的麦克杯智慧灯杆
技术实现要素:
6.针对上述存在的问题,本发明提供了一种基于投影互动的麦克杯智慧灯杆,具体包括,设计了基于麦克杯结构的智慧灯杆,在此结构基础上,建立了基于智慧灯杆的动态投影互动控制方法。
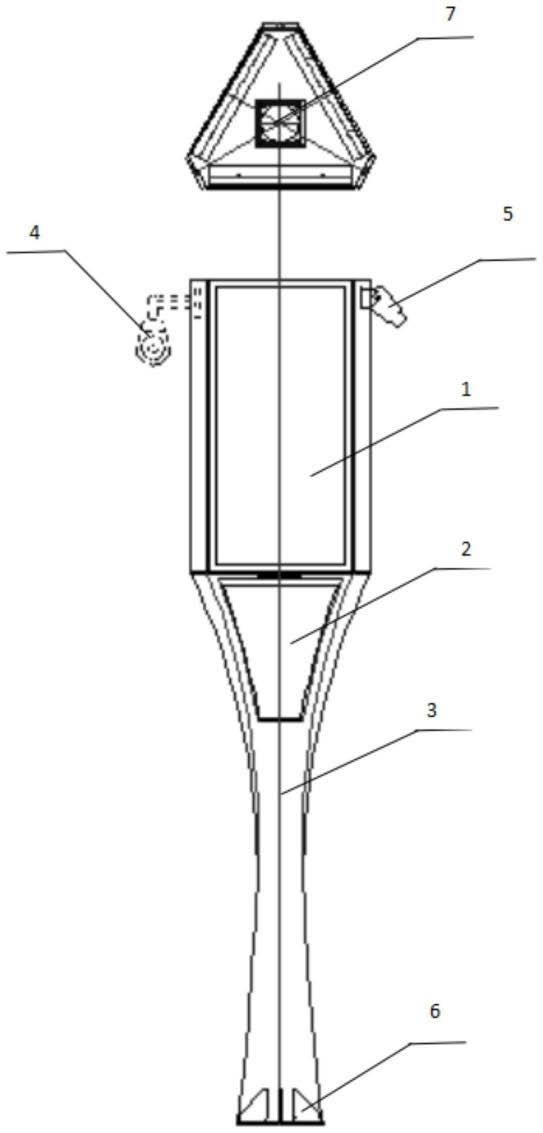
7.优选的,所述的麦克杯结构,从上至下分别为照明装置1,设备存放仓2与智慧灯柱3;其中所述的设备存放仓2放置于智慧灯柱3内部。
8.优选的,所述的照明装置1为三棱柱结构;其中所述的三棱柱结构中的两个透光面之间安装有连接板。
9.具体的,所述的三棱柱结构用以实现多面透光提高光源7的利用率。
10.优选的,所述的连接板上方分别安装有投影仪4与摄像头5。
11.具体的,所述的投影仪4用以接收摄像头5采集的动态数据信息,进行动态投影互动控制。
12.优选的,所述的智慧灯柱3下方固定安装有定位底座6;其中所述的定位底座6上设置有位置传感器。
13.具体的,所述的位置传感器与投影仪4进行联动控制,用以进行智慧灯柱3的安装定位,防止极端环境下造成智慧灯柱3倾倒。
14.优选的,所述的智慧灯柱3上设置有led显示屏,所述的两个led显示屏之间设置有光带。
15.具体的,所述的led显示屏用以进行广告显示,同时可与摄像头5联动,进行指定区域内物体运动状态的展示;所述的光带可进行亮度调节,所述的亮度调节的方式为根据环境光的变化而变换,用以进行led显示屏的辅助照明。
16.优选的,所述的动态投影互动控制方法,当摄像头5监测到有运动物体出现在智慧灯杆区域附近时,投影仪4投射投影并进行指定区域内物体运动状态跟随。
17.优选的,所述的设备存放仓2中,将光源7定位于所述的设备存放仓2上方中心位置。
18.具体的,用以进行光源7的控制与均匀投射。所述的设备存放舱内还包括控制器,所述的控制器用以接收来自智慧灯杆控制电路,以及投影仪4,摄像头5与位置传感器采集的实时监测数据,并对实施监测数据进行数据分析与整理,从而实现智慧灯杆控制电路,以及投影仪4,摄像头5与位置传感器的联合控制。
19.优选的,所述的光源7,通过球形转轴进行活动安装。
20.优选的,所述的球形转轴可通过控制电机自动控制旋转角度进行定向照明。
21.与现有技术相比,本发明的有益效果在于:
22.(1)本发明所述的基于投影互动的麦克杯智慧灯杆,建立了基于三棱柱的透光结构,避免出现过多的照明阴影,提高灯整体的透光率,同时在此基础上,与其他透光形状相比,本发明所述的两个透光面之间可以建立连接板,所述的连接板上用以安装投影仪4与摄像头5,从而从整体上简化了智慧灯杆的安装结构,并为投影仪4与摄像头5的工作提供了亮度基础,以此为动态投影互动控制方法的实施提供了照明环境。
23.(2)在(1)的基础上,本发明中提供了基于动态投影互动控制方法,通过将摄像头5,投影仪4与位置定位装置联合控制,并通过设备存放仓2中的控制器进行数据的中转与数据处理,从而实现智慧灯杆指定区域内物体运动状态跟踪,提升了智慧灯杆的用户体验。
24.(3)在(1)的基础上,所述的智慧灯杆中的光源7可通过球形转轴进行多旋转角度的自动控制,所述的自动控制可根据投影位置的变化进行光源7亮暗的调整,从而提高用户在智慧灯杆区域内活动的动感体验,同时也提高了智慧灯杆光源7的光能利用率。
附图说明
25.图1为一种基于投影互动的麦克杯智慧灯杆结构图;
26.图2为一种基于投影互动的麦克杯智慧灯杆视图图;
27.图中1、照明装置;2、设备存放仓;3、智慧灯柱;4、投影仪;5、摄像头;6、定位底座;7、光源。
具体实施方式
28.实施例1:
29.本实施例中所述的一种基于投影互动的麦克杯智慧灯杆,如图1,图2所示,所述的
智慧灯杆的结构组成为所述的麦克杯结构,从上至下分别为照明装置1,设备存放仓2与智慧灯柱3;其中所述的设备存放仓2放置于智慧灯柱3内部。所述的照明装置1为三棱柱结构;其中所述的三棱柱结构中的两个透光面之间安装有连接板。所述的连接板上方分别安装有投影仪4与摄像头5,其中所述的投影仪4与摄像头5安装于不同的连接板上,所述的智慧灯柱3上设置有led显示屏,所述的两个led显示屏之间设置有光带。所述的设备存放仓2中,通过将光源7定位于所述的设备存放仓2上方中心位置。所述的光源7,通过球形转轴进行活动安装。
30.所述的动态投影互动控制方法,当摄像头5监测到有运动物体出现在智慧灯杆区域附近时,投影仪4投射投影并进行指定区域内物体运动状态跟随。
31.具体的,用以增强智慧灯杆与行人的互动性,其中所述的动态投影互动控制方法的控制步骤为:
32.s1、首先在指定区域内,使用摄像头5对出现的运动物体进行特征识别;
33.s2、将特征识别的结果传送至设备存放仓2的控制器中进行解析;
34.s3、将解析的结果传送至投影仪4中进行指定投影图案的投放;
35.s4、在此过程中启动位置传感器并记录运动物体的位置信息;
36.s5、将位置信息传送至投影仪4中进行物体在指定位置数据下的物体运动状态跟随。
37.所述的光源7,通过球形转轴进行活动安装。
38.所述的球形转轴可通过控制电机自动控制旋转角度进行定向照明。
39.所述的控制器采集的位置传感器中的动态位置数据,并将位置数据转换为控制电机的转动控制数据,从而进行光源7角度变换的自适应调节,根据指定区域内物体运动状态,调节照明装置1中三棱柱结构的亮度,其中亮度的调节方式为,距离智慧灯杆距离越近时亮度越低,距离智慧灯杆距离越远时亮度越高,以此实现运动物体的运行状态跟随照明操作。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。