1.本实用新型涉及用于对水厂沉淀池进行虹吸排泥的行车行走系统进行改进,实现同步行走的系统。
背景技术:
2.自来水厂的沉淀池,一般采用虹吸式排泥行车,将池底沉淀的污泥排出;相关虹吸排泥行车,可参考中国专利公开号为cn103908808a的一种虹吸式排泥机、中国专利公开号为cn1 05289058a的行车式虹吸泥机、中国专利公开号为cn105797445a的桁架虹吸式吸泥机、中国专利公开号为cn112473199a的智能化桁车式虹吸排泥机等。
3.自来水厂的沉淀池所用的虹吸排泥行车,日常属于无人值守的自动化运行设备;自来水厂的沉淀池规模一般很大,所用的虹吸排泥行车跨度一般也需要达到20米以上,甚至30余米;行车通过行走轮,架在沉淀池两边的轨道上,沿轨道进行缓慢往复行走;而沉淀池的长度往往需要达到上百米,甚至200米以上,虹吸排泥行车一般在轨道的两端设有限位装置,行车的行走轮达到两端后才会重新校准,然后反向运动,重新沿轨道行走工作。
4.由于虹吸排泥行车在设计时,考虑沿轨道行走,行走控制精度要求很低,故一般都采用普通的三相交流异步电动机进行驱动;但由于沉淀池内沉淀的污泥是不均匀的,而虹吸排泥行车的跨度又很大,经常导致行车两侧因遇到的污泥阻力不同,两侧的行走轮行走距离不同步,而行走距离又很长,一段时间累积后,会导致行走轮骑到轨道上,造成行走轮边缘磕碰磨损,严重情况下还会造成脱轨;一旦发生脱轨,排泥作业就得暂停,还得调用吊车等设备,将行车重新恢复进轨道;更严重的情况,发生脱轨后,行走轮未自动停转,行走轮又正好落在轨道内侧,还沿轨道下的地面移动,会导致行车一侧坠入沉淀池,造成更加严重的生产事故。
5.针对这样的情况,除了提高虹吸排泥行车的行走速度,及时清除污泥,避免局部过渡堆积,导致污泥沉淀过分不均匀外,还有必要对虹吸排泥行车的行走系统进行改进,以期尽可能实现同步行走,避免行走轮骑到轨道上,提高生产安全。
技术实现要素:
6.本实用新型的目的在于提供一种沉淀池虹吸排泥行车用同步行走系统,以期使虹吸排泥行车的两侧同步行走,避免骑压轨道,甚至脱轨,从而提高生产安全可靠性。
7.为达到上述实用新型的目的,提供了沉淀池虹吸排泥行车用同步行走系统,在沉淀池的两侧池壁平台面上铺设有平行的轨道,每侧轨道上均设有一台沿轨道直线往复行走的大车,两侧的大车通过梁连接在一起形成行车,行车中间架设有虹吸排泥装置;每侧的大车上设有行走系统,并一起连接进控制箱;
8.沿每侧轨道设有若干标记点,每侧轨道边设置的标记点位置一一对应;
9.在每侧的大车上设有传感器,两侧的传感器在所在大车上的设置位置对应;
10.所述传感器的检测面位置与所在大车一侧的标记点设置位置相匹配;
11.所述传感器与控制箱相连。
12.作为本实用新型的进一步改进,所述标记点为地标传感器;所述传感器为地标读卡器。
13.作为本实用新型的进一步改进,所述标记点为铁磁感应的标记点物;
14.所述传感器为霍尔传感器;
15.所述霍尔传感器通过安装支架固定在大车的车架上。
16.进一步的,所述霍尔传感器的感应面向下设置。
17.进一步的,所述霍尔传感器固定安装在所述大车的外侧。
18.进一步的,铁磁感应的标记点物沿所在一侧轨道直线设置,且均布设置。
19.进一步的,所述标记点为螺钉。
20.再进一步的,每侧轨道边设置的用作标记点的全部所述螺钉露出平台面的高度误差小于 10mm。
21.再进一步的,所述螺钉为轨道安装固定螺钉。
22.作为本实用新型的进一步改进,两侧所述大车的行走系统独立启停运行;
23.或两侧所述大车的行走系统内分别设有独立控制并动作的刹车装置。
24.本实用新型沉淀池虹吸排泥行车用同步行走系统,通过控制箱接收两侧大车上传感器对轨道上的标记点的检测反馈,计算间隔时间,来判断调整两侧大车的行走系统(停车或减速),从而确保行车的两侧大车沿轨道同步移动,及时调整行车姿态,避免行车骑轨、脱轨。
25.本实用新型沉淀池虹吸排泥行车用同步行走系统,可对现有的沉淀池虹吸排泥行车进行升级改造,结构简单,改造成本低,且易于实现,可充分保证行车的运行安全。
附图说明
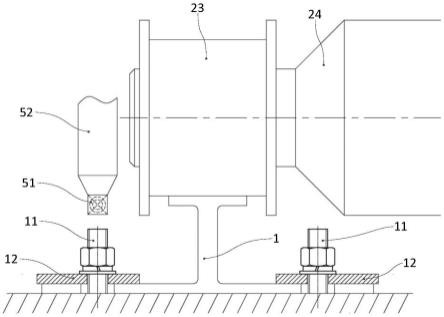
26.图1为本实用新型的沉淀池虹吸排泥行车的整体结构示意图;
27.图2为同步行走系统的安装示意图;
28.图3为同步行走系统的线路示意图。
具体实施方式
29.以下结合附图和具体实施例,对本实用新型做进一步说明。
30.如图1所示,为沉淀池虹吸排泥行车的整体结构示意图,在沉淀池的两侧铺设有轨道1,上面设有行车的大车21,两侧的大车21通过梁22连接在一起,中间架设有虹吸排泥装置3,吸泥管伸入到沉淀池的底部,将池底沉淀的污泥通过虹吸原理,排到沉淀池外侧的排泥沟里。
31.每侧的大车21上设有行走系统,并一起连接进控制箱4。
32.为实现两侧的大车21沿所述轨道1同步运动,在不更换驱动系统的情况下,对行走系统进行改造,沿轨道1设有若干标记点,每侧轨道边设置的标记点位置一一对应;在每侧的大车21上均设有传感器,传感器在大车21上的设置位置也对应;通过传感器对标记点进行检测,当传感器检测到标记点时,即向控制箱4发出信号,控制箱4记录两侧的传感器发出的信号时间,并记录间隔时间,以此判断是否同步行走。
33.上述间隔时间的判断方法一为,单侧传感器经过相邻两个标记点,或经过若干个标记点的时间;对两侧经过相同数量标记点的用时进行比对,以此来判断沿轨道1行走同样的距离的用时,如用时接近,则表明同步运行;否则就存在大车21骑压轨道1,甚至出轨的风险。
34.上述间隔时间的判断方法二为,两侧传感器经过同一方位的标记点的时间,控制箱4比对两侧传感器经过同一方位标记点的时间差,当时间差接近0时,则表明两侧的大车21在轨道1的相同位置上;否则就存在大车21骑压轨道1,甚至出轨的风险。
35.如图2所示,上述标记点可以是轨道1的安装螺钉;轨道1在安装时,一般通过膨胀螺钉11固定到池壁平台面上进行安装,在设置膨胀螺钉11时,将沉淀池两侧的池壁平台面进行测量规划,使沉淀池两侧的膨胀螺钉11一一对应设置(即两侧同一位置的膨胀螺钉11的连线与轨道1的铺设方向垂直),且尽可能均布设置。膨胀螺钉11露出平台面的高度也尽可能一致,误差控制在10mm范围内;轨道1铺设到池壁平台面上,压板12穿过膨胀螺钉11的露出部分,然后压在轨道1的底边上,拧紧螺母,将轨道1固定在池壁平台面上。膨胀螺钉 11的露出部分,沿轨道1规律设置,即可作为标记点。
36.在大车21的车架上通过安装支架52固定有霍尔传感器51,所述霍尔传感器51的感应面优选的向下设置,且贴近所述膨胀螺钉11的露出部分端面;霍尔传感器51的有效检测范围一般为10mm,可以对沿轨道1设置的全部膨胀螺钉11的露出部分端面进行检测。
37.如果池壁平台面上的轨道1铺设时,未能规划好固定轨道1的膨胀螺钉11的位置,导致两侧的膨胀螺钉11并非一一对应设置,则可以重新沿轨道1规划位置,重新在池壁平台面上打入膨胀螺钉11,或沿轨道1布置具体铁磁感应的标记点物(如磁铁、铁片、铁钉等),通过霍尔传感器51进行监测识别。
38.所述霍尔传感器51尽量布置在所述大车21的外侧,相应的标记点识别物布置在轨道1 的外侧,这样方便对所述霍尔传感器51进行安装、检修。同时,由于所述大车21的行走轮 23骑在轨道1上,行走轮23的驱动系统24(减速箱、驱动电机等)一般安装在大车21的内侧,驱动系统24的运行会产生磁环境,将所述霍尔传感器51布置远离驱动系统24,可以减少电磁干扰,确保检测的准确度。
39.当然,所述传感器、标记点还可参考目前agv用的地标读卡器和地标传感器(可参考中国专利公开号为cn201867651u的自动导引车地标传感器、中国专利公开号为cn112840179a 的智能地标),但由于本实用新型的沉淀池虹吸排泥行车移动速度慢(一般在1m/min左右),且本实用新型的同步行走系统仅用作防行走轮23骑轨、脱轨,并不需要很精确、精准的位置感应,故上述霍尔传感器51与螺钉等铁磁感应标记点物与足以满足需求。
40.本实用新型的沉淀池虹吸排泥行车用同步行走系统,由控制箱4根据两侧的传感器的检测反馈时间,来进行判断,最终控制一侧或两侧的大车21的驱动系统24进行动作,调整两侧大车21的行进速度,使两侧大车21尽量保持同步运行。
41.如图3所示,间隔时间的判断方法二,本实用新型的沉淀池虹吸排泥行车用同步行走系统的调整方法为,将两侧的大车21分别定义为a侧、b侧,两侧的霍尔传感器51就经过并检测到同一方位的膨胀螺钉11的信号反馈给控制箱4,控制箱4记录下反馈时间分别为t1、 t2,然后计算δt=t1-t2。
42.当1s>δt>-1s时,证明两侧的大车21行走情况基本同步,1s以内的时间差,根据
大车21的移动速度(1m/min)计算,大概前后距离差为16.7mm以内,尚不足以使行走轮23骑轨或脱轨。本处的1s的时间差为范例,可根据实际的行走轮23与轨道1的纠错空间,来调整允许的最大时间差。
43.当δt超出预设的时间差范围时,即存在风险,需要控制箱4对驱动系统24进行控制。由于虹吸排泥行车使用的大都是无信号反馈的三相交流异步电动机,故同步控制的调整方式为,将驱动系统24的驱动电机短暂断电,或短暂启动驱动系统24内的刹车对大车21进行减速。
44.当δt>1s时,则a侧大车21运行领先,控制箱4对a侧大车21的驱动系统24施加t1 时间的同步控制调整,使a侧大车21主动减速t1时间,让b侧大车21跟上,从而调整整个沉淀池虹吸排泥行车的姿态。
45.相应的,当δt<-1s时,则b侧大车21运行领先,控制箱4对b侧大车21的驱动系统 24施加t2时间的同步控制调整,使b侧大车21主动减速t2时间,让a侧大车21跟上,从而调整整个沉淀池虹吸排泥行车的姿态。
46.t1/t2=|δt|
×
c。
47.其中,c为常数,根据具体的同步控制调整方式(使驱动电机断电,或启动刹车),以及整个沉淀池虹吸排泥行车的行走情况进行调整、设定,尽可能使得1次调整,就能使两侧的大车21实现同步。
48.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
