1.本发明涉及的是飞机模拟器技术领域,具体涉及一种采用直线位移信号的飞机模拟器脚蹬装置。
背景技术:
2.飞机模拟器脚蹬装置是飞机模拟器研制的核心技术组件和关键技术组件的之一,对驾驶员获得逼真的驾驶体验具有决定性作用。以往飞机模拟器脚蹬装置采用的是角位移电位器和张紧力不可调式弹簧筒,且需配套采用扇形轮、传动齿轮和较为复杂的铰链机构,导致:(1)脚蹬装置模块化程度低,占据飞机模拟器座舱空间大,维修性差;(2)随着脚蹬装置使用时间的增长,扇形轮、传动齿轮和铰链机构磨损不断增大,角位移电位器输出信号的误差不断变大,通过模拟器中央处理机传输给仪表系统、显控系统的信号失真率变大,使驾驶体验效果大大下降,影响飞行驾驶训练质量;(3)角位移电位器输出的角位移信号,使模拟器控制软件编制难度增加。
3.综上所述,本发明设计了一种采用直线位移信号的飞机模拟器脚蹬装置。
技术实现要素:
4.针对现有技术上存在的不足,本发明目的是在于提供一种采用直线位移信号的飞机模拟器脚蹬装置,减少脚蹬装置的系统,结构更加简单,生产成本降低,生产效率提高;向飞机模拟器仪表显控系统和视景系统提供稳定、精准的直线位移信号,以提高脚蹬装置可靠性和仿真性;大大提高脚蹬装置的模块化程度,减少其在座舱内的占据空间及其与飞机模拟器座舱的机电连接,使其便于单独包装运输,并具有良好的维修性和保障性;可根据不同机型脚蹬操纵力矩大小的需要,调整设置弹簧筒的张紧力,以保证飞行员获得逼真的驾驶体验。
5.为了实现上述目的,本发明是通过如下的技术方案来实现:一种采用直线位移信号的飞机模拟器脚蹬装置,包括脚蹬主体,所述的脚蹬主体包括左脚蹬、右脚蹬、平行四边形运动机构、信号采集板和壳体,壳体内集成有信号采集板和平行四边形运动机构,平行四边形运动机构两端分别连接有左脚蹬和右脚蹬;壳体后端中心设置有电缆插头。
6.作为优选,所述的平行四边形运动机构包括直线位移电位器、张紧力可调式弹簧筒、前撑杆和后撑杆,前撑杆两端分别铰接有直线位移电位器运动支点和张紧力可调式弹簧筒运动支点,直线位移电位器运动支点通过直线位移电位器与直线位移电位器固定支点相连,信号采集板与直线位移电位器相连,直线位移电位器固定支点固定在后撑杆上,张紧力可调式弹簧筒运动支点通过张紧力可调式弹簧筒与张紧力可调式弹簧筒固定支点相连,张紧力可调式弹簧筒固定支点固定在后撑杆上,壳体内设置有与后撑延长杆中心固定的后撑杆固定支点,前撑杆中心设置有与前撑延长杆中心固定的前撑杆固定支点,前撑延长杆和后撑延长杆两端均分别连接左脚蹬、右脚蹬。
7.本发明具有以下有益效果:
8.(1)采用直线位移电位器替代角位移电位器,取消角位移电位器配套的扇形轮、传动齿轮及其传动机构,脚蹬装置功能不变但结构更加简单,人工成本降低,生产效率极大提高;直线位移电位器输出的是直线位移信号,直线位移信号处理更为简易、更好应用,可降低飞机模拟器控制软件的编制难度。
9.(2)采用直线位移电位器,解决了以往因扇形轮和传动齿轮用久松动,角位移传感器产生的信号值不稳定,经常需要调整矫正的问题,输出提供给飞机模拟器仪表显控系统和视景系统的信号稳定、精准,系统可靠性、仿真性更高,驾驶体验性更好。
10.(3)采用张紧力可调式弹簧筒,可根据不同机型脚蹬操纵力矩大小的需要,调整设置弹簧筒的张紧力,保证飞行员能够获得逼真的操纵感觉,驾驶体验更为真实。
11.(4)脚蹬装置整体固定在座舱底板上,改变了传统的脚蹬装置与舱体多点连接带来的占据空间大、拆装难度大的弊端,维修更加便捷,维修性更高。
12.(5)脚蹬装置具有模块化优势,包装运输方便,返厂大修快捷,保障性更好。
附图说明
13.下面结合附图和具体实施方式来详细说明本发明;
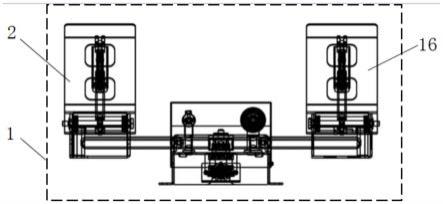
14.图1为本发明的整体结构示意图;
15.图2为图1的俯视图;
16.图3为图1的侧视图;
17.图4为本发明的立体示意图;
18.图5为本发明的平行四边形运动机构结构示意图;
19.图6为本发明的脚蹬装置的基本原理图。
具体实施方式
20.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
21.参照图1-6,本具体实施方式采用以下技术方案:一种采用直线位移信号的飞机模拟器脚蹬装置,包括脚蹬主体1,所述的脚蹬主体1包括左脚蹬2、右脚蹬16、平行四边形运动机构17、信号采集板6和壳体15,壳体15内集成有信号采集板6和平行四边形运动机构17,平行四边形运动机构17两端分别连接有左脚蹬2和右脚蹬16;壳体15后端中心设置有电缆插头5。
22.值得注意的是,所述的平行四边形运动机构17包括直线位移电位器4、张紧力可调式弹簧筒8、前撑杆13和后撑杆14,前撑杆13两端分别铰接有直线位移电位器运动支点12和张紧力可调式弹簧筒运动支点10,直线位移电位器运动支点12通过直线位移电位器4与直线位移电位器固定支点3相连,信号采集板6与直线位移电位器4相连,直线位移电位器固定支点3固定在后撑杆14上,张紧力可调式弹簧筒运动支点10通过张紧力可调式弹簧筒8与张紧力可调式弹簧筒固定支点7相连,张紧力可调式弹簧筒固定支点7固定在后撑杆14上,壳体15内设置有与后撑延长杆19中心固定的后撑杆固定支点9,前撑杆13中心设置有与前撑延长杆18中心固定的前撑杆固定支点11,前撑延长杆18和后撑延长杆19两端均分别连接左脚蹬2、右脚蹬16。
23.本具体实施方式的工作原理:脚蹬装置可以通过蹬踏左、右脚蹬进行操纵,基本工作原理如图4所示。
24.平时情况下,左、右脚蹬处于“中立”位置。
25.蹬踏左脚蹬时,平行四边形运动机构会使直线位移电位器导杆拉长、而张紧力可调式弹簧筒的导杆便会收缩进弹簧筒,此时直线位移电位器便会输出位移增大的信号,到信息采集板。
26.反之,蹬踏右脚蹬时,平行四边形运动机构会使直线位移电位器导杆收缩、而张紧力可调式弹簧筒的导杆便会拉长,此时直线位移电位器便会输出位移变小的信号,到信息采集板。
27.本具体实施方式的脚蹬装置的功能是,模拟真实飞机的脚蹬,并向飞行员提供操纵飞机时产生的力感。蹬踏脚蹬可以模拟操纵飞机的方向舵。
28.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种采用直线位移信号的飞机模拟器脚蹬装置,其特征在于,包括脚蹬主体(1),所述的脚蹬主体(1)包括左脚蹬(2)、右脚蹬(16)、平行四边形运动机构(17)、信号采集板(6)和壳体(15),壳体(15)内集成有信号采集板(6)和平行四边形运动机构(17),平行四边形运动机构(17)两端分别连接有左脚蹬(2)和右脚蹬(16);壳体(15)后端中心设置有电缆插头(5)。2.根据权利要求1所述的一种采用直线位移信号的飞机模拟器脚蹬装置,其特征在于,所述的平行四边形运动机构(17)包括直线位移电位器(4)、张紧力可调式弹簧筒(8)、前撑杆(13)和后撑杆(14),前撑杆(13)两端分别铰接有直线位移电位器运动支点(12)和张紧力可调式弹簧筒运动支点(10),直线位移电位器运动支点(12)通过直线位移电位器(4)与直线位移电位器固定支点(3)相连,信号采集板(6)与直线位移电位器(4)相连,直线位移电位器固定支点(3)固定在后撑杆(14)上,张紧力可调式弹簧筒运动支点(10)通过张紧力可调式弹簧筒(8)与张紧力可调式弹簧筒固定支点(7)相连,张紧力可调式弹簧筒固定支点(7)固定在后撑杆(14)上,壳体(15)内设置有与后撑延长杆(19)中心固定的后撑杆固定支点(9),前撑杆(13)中心设置有与前撑延长杆(18)中心固定的前撑杆固定支点(11),前撑延长杆(18)和后撑延长杆(19)两端均分别连接左脚蹬(2)、右脚蹬(16)。
技术总结
本发明公开了一种采用直线位移信号的飞机模拟器脚蹬装置,它的壳体内集成有信号采集板和平行四边形运动机构,平行四边形运动机构两端分别连接有左脚蹬和右脚蹬。本发明减少脚蹬装置的系统,结构更加简单,生产成本降低,生产效率提高;向飞机模拟器仪表显控系统和视景系统提供稳定、精准的直线位移信号,以提高脚蹬装置的可靠性和仿真性;大大提高了脚蹬装置的模块化程度,减少其在座舱内的占据空间及其与飞机模拟器座舱的机电连接,使其便于单独包装运输,并具有良好的维修性和保障性;可根据不同机型脚蹬操纵力矩大小的需要,调整设置弹簧筒的张紧力,以保证飞行员获得逼真的驾驶体验。验。验。
技术研发人员:杨军良 刘伟 施卫明
受保护的技术使用者:三航数字技术(浙江)有限公司
技术研发日:2022.10.24
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
