1.本发明属于避障传感器技术领域,具体涉及一种单目结构光相机识别玻璃的识别方法及单目结构光相机。
背景技术:
2.随着社会发展,机器人普及率越来越高,机器人领域常用避障传感器有激光传感器,视觉传感器,3d传感器,其中3d传感器在机器人领域使用越来成熟。3d传感器包括双目结构光,tof,单目结构光,但单目结构光因其精度高,成本低,功耗低等优点被广发用于机器人行业中。
3.在实际应用过程中,会遇到玻璃之类的透明的障碍物体,因单目结构光相机发射出去的光斑点会透过玻璃,导致深度图会同时呈现玻璃及玻璃后面的物体,此时候玻璃后面的物体相当于错误信息,会导致机器人的避障系统出现误判。
技术实现要素:
4.有鉴于此,本发明的主要目的在于提供一种单目结构光相机识别玻璃的识别方法及单目结构光相机。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.本发明实施例提供一种单目结构光相机识别玻璃的识别方法,该方法包括:
7.第一单目设备、第二单目设备通过立体配准方式进行配准,获得配准后的第一单目设备、第二单目设备;
8.根据所述配准后的第一单目设备、第二单目设备采集的深度图获得纯玻璃的深度图;
9.通过拟合函数对所述纯玻璃的深度图进行补全,获得玻璃背后物体的深度图。
10.上述方案中,所述第一单目设备、第二单目设备通过立体配准方式进行配准,获得配准后的第一单目设备、第二单目设备,之前,该方法还包括:预先设置第一单目设备、第二单目设备的内参和外参,所述外参包括平移矩阵及旋转矩阵。
11.上述方案中,所述第一单目设备、第二单目设备通过立体配准方式进行配准,获得配准后的第一单目设备、第二单目设备,具体为:将第二单目设备的深度图转到空间坐标,再根据预先设置的外参转换到第一单目设备的空间坐标,再将转换后的空间坐标转换到平面坐标,即可完成第二单目设备到第一单目设备之间的配准。
12.上述方案中,所述根据预先设置的外参转换到第一单目设备的空间坐标,具体为:根据prgb=r*pir t进行转换,其中,r为旋转矩阵,t为平移矩阵,pir为第二单目设备的深度图空间坐标,prgb为第二单目设备配准后得到的空间坐标。
13.上述方案中,所述根据预先设置的外参转换到第一单目设备的空间坐标,具体为:根据将转换后的空间坐标转换到平面坐标,其中,u和v表示深度的图的
平面坐标x和y,x和y表示转换后的空间坐标,z表示平面坐标(x,y)处对应的深度值,fx、fy、cx、cy是相机的内参,fx和fy分别为x,y方向的焦距,cx和cy分别为x、y方向的主光轴点。
14.上述方案中,所述根据所述配准后的第一单目设备、第二单目设备采集的深度图获得纯玻璃的深度图,具体为:所述第二单目设备采集的深度图减去第一单目设备采集的深度图,获得纯玻璃的深度图。
15.上述方案中,所述通过拟合函数对所述纯玻璃的深度图进行补全,获得玻璃背后物体的深度图,具体为:根据拟合函数z=a*x*x b*y*y a*x b*y c确定黑洞深度值,其中z表示黑洞深度值,x和y表示平面坐标,a、b、c为拟合的参数。
16.本发明实施例还提供一种单目结构光相机,包括第一单目设备、第二单目设备;
17.所述第一单目设备设置在第二单目设备的上方,用于识别玻璃背后的物体;
18.所述第二单目设备设置在第一单目设备的下方,用于识别玻璃及玻璃后的物体。
19.上述方案中,所述第一单目设备包括第一支架、第一发射模组、第一彩色模组、第一接收模组、偏振片,所述第一发射模组、第一彩色模组、第一接收模组沿水平向依次设置在第一支架上,所述偏振片设置在第一接收模组的水平方向或者垂直方向上。
20.上述方案中,所述第二单目设备包括第二支架、第二发射模组、第二彩色模组、第二接收模组,所述第二发射模组、第二彩色模组、第二接收模组沿水平向依次设置在第二支架上。
21.与现有技术相比,本发明能够准确识别出玻璃,以便后续为机器人的避障提供数据基础。
附图说明
22.此处所说明的附图用来公开对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
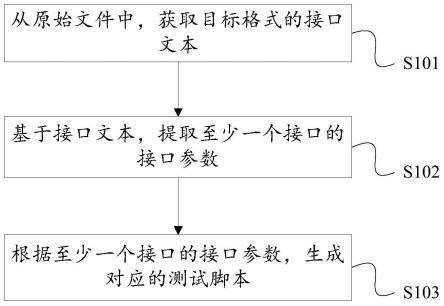
23.图1为本发明实施例提供一种单目结构光相机识别玻璃的识别方法的流程图;
24.图2为本发明实施例提供一种单目结构光相机的结构示意图。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
26.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
27.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没
有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
28.本发明实施例提供一种单目结构光相机识别玻璃的识别方法,如图1所示,该方法包括:
29.步骤101:第一单目设备1、第二单目设备2通过立体配准方式进行配准,获得配准后的第一单目设备1、第二单目设备2;
30.具体地,将第二单目设备2的深度图转到空间坐标,再根据预先设置的外参转换到第一单目设备1的空间坐标,再将转换后的空间坐标转换到平面坐标,即可完成第二单目设备2到第一单目设备1之间的配准。
31.所述根据prgb=r*pir t将预先设置的外参转换到第一单目设备1的空间坐标,其中,r为旋转矩阵,t为平移矩阵,pir为第二单目设备2的深度图空间坐标,prgb为第二单目设备2配准后得到的空间坐标。
32.根据将转换后的空间坐标转换到平面坐标,其中,u和v表示深度的图的平面坐标x和y,x和y表示转换后的空间坐标,z表示平面坐标(x,y)处对应的深度值,fx、fy、cx、cy是相机的内参,fx和fy分别为x,y方向的焦距,cx和cy分别为x、y方向的主光轴点。
33.反之,通过还可以从空间坐标转换到平面坐标。
34.步骤102:根据所述配准后的第一单目设备1、第二单目设备2采集的深度图获得纯玻璃的深度图;
35.具体地,由于第二单目设备2能同时识别到玻璃及玻璃后的物体,第一单目设备1只能识别玻璃背后的物体,所以,所述第二单目设备2采集的深度图减去第一单目设备1采集的深度图,获得纯玻璃的深度图。
36.步骤103:通过拟合函数对所述纯玻璃的深度图进行补全,获得玻璃背后物体的深度图。
37.具体地,由于纯玻璃的深度图会出现黑洞,黑洞主要是玻璃后面的物体,所以根据拟合函数z=a*x*x b*y*y a*x b*y c确定黑洞深度值,其中z表示黑洞深度值,x和y表示平面坐标,a、b、c为拟合的参数。
38.进一步地,步骤101之前该方法还包括:预先设置第一单目设备1、第二单目设备2的内参和外参,所述外参包括平移矩阵及旋转矩阵。
39.所述内参包括fx、fy、cx、cy,fx和fy分别为x,y方向的焦距,cx和cy分别为x、y方向的主光轴点。
40.本发明实施例还提供一种单目结构光相机,如图2所示,包括第一单目设备1、第二单目设备2;
41.所述第一单目设备1设置在第二单目设备2的上方,用于识别玻璃背后的物体;
42.所述第二单目设备2设置在第一单目设备1的下方,用于识别玻璃及玻璃后的物体。
43.所述第一单目设备1包括第一支架11、第一发射模组12、第一彩色模组13、第一接
收模组14、偏振片15,所述第一发射模组12、第一彩色模组13、第一接收模组14沿水平向依次设置在第一支架11上,所述偏振片15设置在第一接收模组14的水平方向或者垂直方向上。
44.由于玻璃的镜面反射,其反射光的偏振方向与激光发射器的偏振方向相同,在rx上加与第一发射模组12的偏振方向正交的偏振片后,其反射光不能透过偏振片而被rx接收到;而玻璃后面的物体是漫反射,有部分光可以通过偏振片后而被rx接收到;所以第一单目设备1加上与第一发射模组12正交的偏振片后,可以完整去除玻璃的散斑信息,而留下玻璃后的漫反射物体散斑信息。
45.所述第二单目设备2包括第二支架21、第二发射模组22、第二彩色模组23、第二接收模组24,所述第二发射模组22、第二彩色模组23、第二接收模组24沿水平向依次设置在第二支架21上。
46.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。