1.本发明涉及信号特征控制技术领域,具体涉及一种基于回归模型的三角反射器优化方法。
背景技术:
2.三角反射器具有强反射回波、对雷达极化不敏感以及多频段适用性好等特点,已经广泛应用于无源干扰及定标体装备中。常见的三角形三面角反射器由三面相互垂直的三角形平板组成,可在约40度的观察角内产生较大的雷达散射截面(rcs),军事领域中利用三角反射器组阵假目标及靶标的方式多见双层环形布设、正多面体布设等形式。存在的主要问题:一是随着侦察卫星、电子侦察飞机的高效性和时效性,固定式假目标的实战效能出现“断崖式”下降;二是三角反射器阵列rcs起伏振荡范围较大,导致干扰效能减弱及武器系统的定位误差;三是常见三角反射器组阵假目标存在的架设时间长、人员需求多等缺点导致不能满足应急作战需求。
3.为了提高三角反射器用作军事假目标的效能,出现了不少改进型的三角反射器设计。比如,将三角反射器的垂直面分解成多个叶片,通过旋转叶片角度改变rcs特征;在三角反射器反射面确定半椭圆形凹陷结构、梯形切割等方式改进rcs特征;在三角反射器表面涂覆吸波涂层改进rcs特征。三角反射器阵列组阵方式研究多集中在卫星及机载激光测距领域,对三角反射器组阵假目标的研究不多。现有技术中大多是基于对改变结构的三角反射器进行仿真计算,得到对应rcs特性,进而选择三角反射器的结构改变参数。存在以下问题:
4.常见三角反射器设计中多采取的是变量间隔采样测试的方法寻优,结论说服力不高。三角反射器阵列设计中的仿真计算量问题与计算资源、设计时效比的矛盾难以解决。
技术实现要素:
5.有鉴于此,本发明提出了一种基于回归模型的三角反射器优化方法,能够根据实战需要设定不同的优化目标函数及目标函数值,快速得到优化结果,其优化精度亦满足工程设计需求。
6.为实现上述目的,本发明的技术方案为:
7.本发明的一种基于回归模型的三角反射器优化方法,包括如下步骤:
8.步骤一:选择目标rcs求解方法;
9.步骤二:确定三角反射器阵列结构参数;根据三角反射器几何结构和阵列方式,确定优化变量及变量范围;
10.步骤三:基于改进的格栅序列法,以空间填充方式对步骤二确定的优化变量进行数据采样,得到采样数据;
11.步骤四:利用步骤三的采样数据建立三角反射器阵列,采用步骤一确定的目标rcs求解方法,通过电磁仿真计算得到三角反射器阵列rcs特性基础数据;
12.步骤五:将步骤三的采样数据和步骤四的rcs特性基础数据作为神经网络学习的
样本数据,建立结构参数和目标rcs特性的回归模型;具体方式为搭建神经网络学习环境,将步骤三的第1组变量采样点、步骤四的三角反射器rcs特性基础数据合并,作为神经网络学习的样本数据,基于levenberg-marquardt反向传播算法进行神经网络训练并生成变量与rcs特性的回归模型;
13.步骤六:根据用户需求设置优化目标函数,根据目标函数数量、性质及相互关系选择优化算法,使用步骤五的回归模型作进行智能优化并得到优化结果。
14.其中,所述步骤一中,根据三角反射器阵列的几何结构和作战对象工作频率,考虑求解精度和优化时效比,选择三角反射器阵列rcs求解方法。
15.其中,所述步骤二中,首先确定三角反射器几何结构参数,在三角反射器反射面上做等腰梯形切割操作,梯形的下底、下底中点分别与三角反射器斜棱边、斜棱边中点重合,在梯形下底端点与三角反射器直棱边交点连线上取梯形的上底端点,梯形下底长度、梯形高度设为优化变量;
16.其次确定三角反射器阵元的结构参数,将三角反射器沿y轴正方向移动,后沿平行于xoz面的斜棱边旋转,移动的距离、旋转的角度设为优化变量;
17.所述步骤三中,所述采样数据包括分别生成2组变量采样点:第1组是切割梯形底边长度和梯形高度,第2组是三角反射器阵元的移动距离和旋转角度。
18.其中,所述步骤四中,以步骤三得到的第1组变量采样点数据为三角反射器建模数据,利用lua脚本实现feko自动化建模并求解rcs,得到三角反射器的rcs特性基础数据。
19.其中,所述步骤六中,还包括根据三角反射器优化设计指标,设置优化目标函数,选择基于遗传算法的多目标优化方法进行变量优化,得到三角反射器阵元的帕累托最优解集。
20.其中,由用户自行选择需要的三角反射器几何结构参数,根据实际应用需求,选择优化结果中最适合的变量参数,建立三角反射器阵列;其中利用优化的三角反射器几何结构参数、步骤三得到的第2组变量采样点数据,作为三角反射器阵元建模数据,重复步骤四至步骤六,得到三角反射器阵元的帕累托最优解集。
21.有益效果:
22.1、本发明基于回归模型的三角反射器优化方法,通过建立三角反射器阵列结构参数与rcs特性的回归模型,作为三角反射器优化设计中rcs特性“求解器”,解决了基于电磁仿真计算进行优化存在的计算规模巨大的难题,并可根据实战需要设定不同的优化目标函数及目标函数值,快速得到优化结果,其优化精度亦满足工程设计需求。
23.2、本发明基于军事应用实战需求,首先分析用户需求,确定优化变量并进行空间采样,自动化生成三角反射器rcs基础数据库,利用反向传播算法建立优化变量与目标rcs特性之间的回归模型,决定系数接近于1。在智能优化过程中利用该模型求解三角反射器rcs特性,解决了仿真计算优化设计存在的超大计算量难题,为三角反射器优化设计提供了更加科学有效的方法。
24.3、本发明在三角反射器优化设计中结合了智能优化算法和神经网络学习的双重优势。在有限次数的三角反射器rcs仿真计算的基础上,建立三角反射器rcs特性基础数据库,通过神经网络学习的方式构建优化变量与三角反射器rcs特性之间的回归模型,将该回归模型作为优化设计中的三角反射器rcs特性“求解器”,解决了三角反射器基于仿真计算
进行优化存在的计算规模巨大的难题,突破了三角反射器仿真优化设计中常见的数据挖掘寻优模式,为三角反射器优化设计提供了更加科学有效的方法。
附图说明
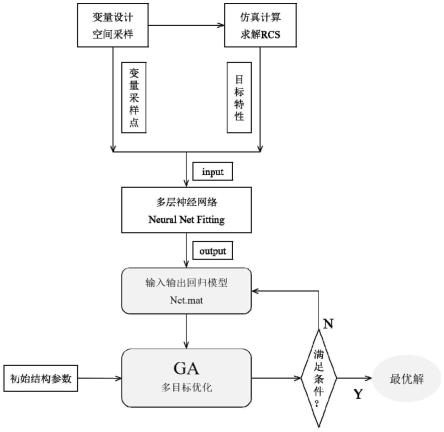
25.图1为本发明三角反射器阵列优化流程图。
26.图2为本发明gamultiobj函数种群进化流程图。
27.图3为本发明三角反射器几何结构优化示意图。
28.图4为本发明三角反射器rcs特性回归模型性能参数图。
29.图5为本发明三角反射器几何结构优化pareto前端结果图。
30.图6为本发明三角反射器阵元结构优化示意图。
31.图7为本发明三角反射器阵元rcs特性回归模型性能参数图。
32.图8为本发明三角反射器阵元结构参数优化pareto前端结果图。
33.图9为本发明一种快速布设三角反射器阵列结构示意图。
34.图10为本发明快速布设三角反射器阵列rcs平面图。
具体实施方式
35.下面结合附图并举实施例,对本发明进行详细描述。
36.本发明提出了一种基于回归模型的三角反射器优化方法,其中三角反射器阵列优化流程如图1所示,具体优化时,可以选择不同的函数,图2所示为gamultiobj函数种群进化流程图。
37.本发明具体包括如下步骤:
38.步骤一:选择目标rcs求解方法。根据三角反射器阵列的几何结构和作战对象工作频率,考虑求解精度和优化时效比,选择三角反射器阵列rcs求解方法。本实施例中三角反射器阵列用作军事假目标及靶标时,均属于电大尺寸、强散射目标,考虑工程设计中目标rcs求解精度要求和求解基础数据的计算时间要求,采取rl-go高频近似算法进行仿真计算。
39.步骤二:确定三角反射器阵列结构参数。根据三角反射器几何结构和阵列方式,确定需要优化的变量及变量范围。
40.具体地,首先确定三角反射器几何结构参数,如图3所示,在三角反射器反射面上做等腰梯形切割操作。梯形的下底、下底中点分别与三角反射器斜棱边、斜棱边中点重合,在梯形下底端点与三角反射器直棱边交点连线上取梯形的上底端点,梯形下底长度、梯形高度设为优化变量。
41.其次确定三角反射器阵元的结构参数,如图6所示,将三角反射器沿y轴正方向移动,后沿平行于xoz面的斜棱边旋转,移动的距离、旋转的角度设为优化变量。
42.步骤三:变量采样。基于空间填充方法,对步骤二确定的优化变量进行数据采样,具体是基于改进的格栅序列法,以空间填充方式进行变量数据采样,分别生成2组变量采样点;第1组是切割梯形底边长度和梯形高度,第2组是三角反射器阵元的移动距离和旋转角度。
43.步骤四:求解目标特性。利用步骤三的采样点数据建立三角反射器阵列,采用步骤
一确定的目标rcs求解方法,通过电磁仿真计算得到三角反射器阵列rcs特性基础数据。具体方式为以步骤三得到的第1组变量采样点数据为三角反射器建模数据,利用lua脚本实现feko自动化建模并求解rcs,得到三角反射器的rcs特性基础数据。
44.步骤五:建立回归模型。将步骤三的采样数据和步骤四的rcs特性基础数据作为神经网络学习的样本数据,建立结构参数和目标rcs特性的回归模型。具体方式为搭建神经网络学习环境,将步骤三的第1组变量采样点、步骤四的三角反射器rcs特性基础数据合并,作为神经网络学习的样本数据,基于levenberg-marquardt反向传播算法进行神经网络训练并生成变量与rcs特性的回归模型。
45.本发明的步骤四和步骤五中,在三角反射器优化设计中结合了智能优化算法和神经网络学习的双重优势。在有限次数的三角反射器rcs仿真计算的基础上,建立三角反射器rcs特性基础数据库,通过神经网络学习的方式构建优化变量与三角反射器rcs特性之间的回归模型,将该回归模型作为优化设计中的三角反射器rcs特性“求解器”,解决了三角反射器基于仿真计算进行优化存在的计算规模巨大的难题,突破了三角反射器仿真优化设计中常见的数据挖掘寻优模式,为三角反射器优化设计提供了更加科学有效的方法。
46.步骤六:结构参数优化。根据用户需求设置优化目标函数,根据目标函数数量、性质及相互关系选择优化算法,使用步骤五的回归模型作为rcs特性“求解器”,进行智能优化并得到优化结果。
47.本步骤还可以包括如下步骤:根据三角反射器优化设计指标,设置优化目标函数,选择基于遗传算法的多目标优化方法进行变量优化,得到一组帕累托最优解集。
48.具体是由用户自行选择需要的三角反射器几何结构参数,根据实际应用需求,选择优化结果中最适合的变量参数,建立三角反射器阵列;其中利用优化的三角反射器几何结构参数、步骤三得到的第2组变量采样点数据,作为三角反射器阵元建模数据,重复步骤四至步骤六,即可得到三角反射器阵元的帕累托最优解集。
49.以设计优化一种快速布设的三角反射器假目标为例,说明本发明优化过程,包括如下步骤;首先进行三角反射器几何结构优化,其次进行三角反射器阵元结构优化,最后利用优化结果设计一种快速布设的三角反射器假目标。
50.其中,三角反射器几何结构优化的具体过程为:如图3所示,电磁波入射范围以θ等于55度、等于45度为中心,覆盖范围为50度。设置梯形下底长度范围为0.1m至0.8m、梯形高度范围为0.01m至0.2m,利用改进的格栅序列法进行30组数据采样并仿真计算三角反射器rcs。三角反射器rcs特性选择平均值和动态范围,设置神经网络学习的隐藏层为10层,基于levenberg marquardt反向传播算法进行训练、验证和测试,rcs特性回归模型的决定系数r等于0.99955,具体性能参数如图4所示,优化的帕累托最优解集如图5所示。设定优化指标为:rcs平均值大于26dbsm、动态范围小于5db。帕累托最优解集中最接近优化指标的是第6组参数,对应的帕累托最优解对应的梯形下底长度是0.2748m,梯形高度是0.0976m。经feko仿真验证,rcs平均值相差0.16db、动态范围相差0.007db。
51.三角反射器阵元结构优化的具体过程为:如图6所示,电磁波入射范围以θ等于45度、等于0度为中心,覆盖范围分别为50度、60度。设置旋转角度范围为5至15度、移动距离范围为0.05m至0.15m,利用改进的格栅序列法进行50组数据采样并仿真计算三角反射器阵元rcs。三角反射器阵元rcs特性选择平均值和动态范围,设置神经网络学习的隐藏层为10
层,基于levenberg marquardt反向传播算法进行训练、验证和测试,rcs特性回归模型的决定系数r等于0.99304,具体性能参数如图7所示,优化的帕累托最优解集如图8所示。设定优化指标为:rcs平均值大于26dbsm、动态范围小于20db。帕累托最优解集中最接近优化指标的是第3组参数,对应的帕累托最优解对应的旋转角度是9.9813度,移动距离是0.0756m。经feko仿真验证,rcs平均值相差0.04db、动态范围相差4db(原因是三角反射器阵元的rcs动态范围取值变化较大,标准差接近5db,可通过增大采样点扩充基础数据库的方法改善)。
52.利用优化结果设计快速布设的三角反射器假目标具体过程为:利用三角反射器几何结构优化参数梯形下底长度是0.2748m、梯形高度是0.0976m,三角反射器阵元结构参数旋转角度是9.9813度、移动距离是0.0756m,设计快速布设三角反射器阵列如图9所示,经feko仿真计算,其rcs平面分布如图10所示。在电磁波入射的方位角、俯仰角均为0度至90度时,与常规单个三角反射器相比,快速布设阵列的rcs取值落在26.48dbsm至29.48dbsm(优化目标的3db范围)范围内的概率提高了72.5%。与优化后的单个三角反射器相比,提高的幅度仍旧达到了25.3%。该组阵列具有结构简单、架设速度快、主要作战方向上rcs取值落在设计指标内的概率大幅提高等特点。非常适合在应急作战中,以3至4人的小组为单位,在重点防护目标周围实施多组同时布设,可对精确制导武器造成全方位的有效干扰。
53.本发明的三角反射器阵列优化方法,适用于三角反射器靶标设计、无源假目标设计,可服务于武器装备的性能测试,用于军事假目标、靶标等的优化设计及实战快速布设等。本发明基于军事应用实战需求,首先分析用户需求,确定优化变量并进行空间采样,自动化生成三角反射器rcs基础数据库,利用反向传播算法建立优化变量与目标rcs特性之间的回归模型,决定系数接近于1。在智能优化过程中利用该模型求解三角反射器rcs特性,解决了仿真计算优化设计存在的超大计算量难题,为三角反射器优化设计提供了更加科学有效的方法。
54.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。