技术特征:
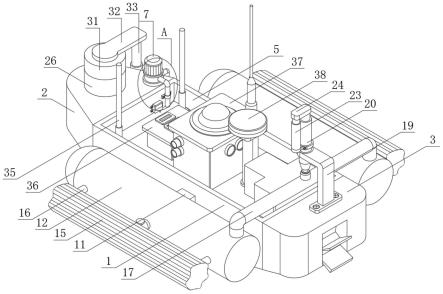
1.一种适用于深海强水动力环境下的水下地形自动探测装置,包括探测载具(1),其特征在于:所述探测载具(1)的一侧外壁固定安装有船头(2),所述探测载具(1)的另外一侧固定安装有驱动机构(3),所述探测载具(1)的底部固定安装有超声波测深仪(4),所述探测载具(1)的顶部开设有槽口(5),且槽口(5)的底壁由驱动机构(3)所在一侧至船头(2)所在一侧逐渐向下倾斜,所述槽口(5)靠近船头(2)的一侧连接有水浸传感器(6),所述船头(2)的顶部安装有抽水泵(7),且抽水泵(7)与水浸传感器(6)之间电性连接,所述抽水泵(7)的输入端固定连接有吸水管(8),且吸水管(8)的底部延伸进入槽口(5)的内部并靠近槽口(5)的底壁,所述抽水泵(7)的输出端固定连接有导出管(9),所述吸水管(8)的外表面套接有卡合件(10),且卡合件(10)的一侧外壁通过螺钉与槽口(5)的一侧内壁贴合。2.根据权利要求1所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:所述探测载具(1)的正面和背面均固定安装有连接件(11),其中一组所述连接件(11)的正面和另外一组连接件(11)的背面均固定连接有筒形气囊(12),两组所述筒形气囊(12)相反的一侧外壁均固定连接有通气管(13),两组所述通气管(13)的顶部均安装有控制阀(14),且控制阀(14)与水浸传感器(6)之间电性连接,两组所述通气管(13)的一端均固定连接有辅助气囊(15),所述筒形气囊(12)相反的一侧外壁均固定连接有衔接条(16),且两组衔接条(16)的一端分别与两组辅助气囊(15)的外表面贴合。3.根据权利要求2所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:两组所述筒形气囊(12)的顶部安装有综合管(17),所述综合管(17)的顶部固定连接有通气接头(18),所述驱动机构(3)的顶部通过螺丝固定连接有折弯板(19),所述折弯板(19)的一侧外壁固定安装有限位环,所述限位环的顶部活动插接有打气筒(20),且打气筒(20)的出气端延伸进入通气接头(18)的内部,所述打气筒(20)的外表面固定连接有套环(21),所述套环(21)的正面固定安装有撑板(22),所述撑板(22)的顶部安装有电动推杆(23),且电动推杆(23)与水浸传感器(6)、控制阀(14)之间电性连接,所述电动推杆(23)的顶部固定安装有组合板(24),且组合板(24)的底部与打气筒(20)的打气端贴合。4.根据权利要求3所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:两组所述筒形气囊(12)的底壁均安装有气压传感器(25),且气压传感器(25)与电动推杆(23)之间电性连接。5.根据权利要求1所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:所述船头(2)的顶部贯穿安装有防护筒(26),所述防护筒(26)的底壁安装有防水电机(27),所述船头(2)的底壁开设有通槽(28),所述防水电机(27)的输出端安装有转辊(29),所述转辊(29)的外表面固定套接有叶轮组(30),且叶轮组(30)的底部贯穿通槽(28)的内部,所述防护筒(26)的顶部螺纹连接有防护盖(31)。6.根据权利要求5所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:所述防护盖(31)的顶部固定连接有一体板(32),所述一体板(32)的底部安装有防水电动杆(33),所述防水电动杆(33)的底部安装有衔接板(34),所述衔接板(34)的正面与船头(2)的背面贴合。7.根据权利要求1所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:所述槽口(5)的底壁安装有两组前后布置的900m网桥天线(35),所述槽口(5)的底壁安装有电源控制集合箱(36),且电源控制集合箱(36)位于900m网桥天线(35)的一
侧。8.根据权利要求1所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于:所述槽口(5)的底壁安装有控制器(37),所述控制器(37)的顶部安装有mp电台天线,且控制器(37)位于电源控制集合箱(36)远离900m网桥天线(35)的一侧,所述槽口(5)的底壁安装有移动站(38)。9.根据权利要求1-8任意一项所述的一种适用于深海强水动力环境下的水下地形自动探测装置,其特征在于,该水下地形自动探测装置的工作步骤如下:s1、工作人员将本装置放入水中,而后通过运行驱动机构(3),促使其内部的动力部件产生动力,带动整个装置在水中移动,其中本装置移动至激流的水流环境中,由于激流与本装置之间的相互碰撞和激流本身的涌动,会导致有部分水体溅入探测载具(1)顶部所开设的槽口(5)的空间内部,并且聚集在槽口(5)内部朝向水浸传感器(6)所在一侧,当溅入槽口(5)空间内部水体聚集到一定程度时,水浸传感器(6)的两极探头在浸水状态下探头导通,传感器输出干接点信号,当探头浸水高度超过设定时,从而产生告警信号,以此控制与其电性连接的抽水泵(7)和控制阀(14)和电动推杆(23);s2、抽水泵(7)运行后,其能够通过吸水管(8)将槽口(5)空间内部的水抽入其自身腔体中,而后通过导出管(9)向外排出,以逐渐减少槽口(5)空间内部所聚集的水体;s3、控制阀(14)打开的同时,电动推杆(23)同步进行上下伸缩作业,以此通过组合板(24)带动打气筒(20)的打气端上下活动,用以通过通气接头(18)、综合管(17)往两组筒形气囊(12)的空间内部注入空气,同时两组筒形气囊(12)空间内部的气体能够顺着两组通气管(13)分享至两组辅助气囊(15)的空间内部,直至筒形气囊(12)空间内部的气压传感器(25)监测到其空间内部气压到达设定值,即停止电动推杆(23)的运行;s4、本装置于水中需要调整方向时,通过运行防水电动杆(33),促使其进行向下收缩作业,以此通过一体板(32)带动防护盖(31)向下移动,以便于防护筒(26)、防水电机(27)、转辊(29)和叶轮组(30)跟随向下移动,之后通过运行防水电机(27),促使其输出轴带动转辊(29)朝向设定方向转动设定角度,同时叶轮组(30)跟随转动。
技术总结
本发明公开了一种适用于深海强水动力环境下的水下地形自动探测装置,包括探测载具,所述探测载具的一侧外壁固定安装有船头,所述探测载具的另外一侧固定安装有驱动机构,所述探测载具的底部固定安装有测深仪,所述探测载具的顶部开设有槽口,所述槽口靠近船头的一侧连接有水浸传感器,所述船头的顶部安装有抽水泵,所述抽水泵的输入端固定连接有吸水管,所述抽水泵的输出端固定连接有导出管,所述吸水管的外表面套接有卡合件。本装置在深海强水动力环境中行驶时,能够及时清理迸溅进入装置空间内部的水体,以防加重整体装置的重量,同时另外开展辅助气囊,以进一步提高本装置于水面上的浮力,降低其下沉或侧翻的概率,且本装置具备调整方向的功能。具备调整方向的功能。具备调整方向的功能。
技术研发人员:李宝钢 王向鑫 杨磊 史先鹏 李德威
受保护的技术使用者:国家深海基地管理中心
技术研发日:2022.10.17
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。