技术特征:
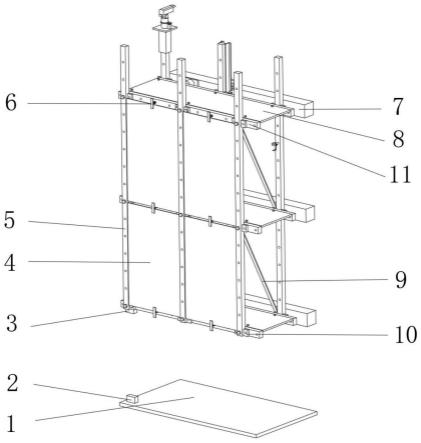
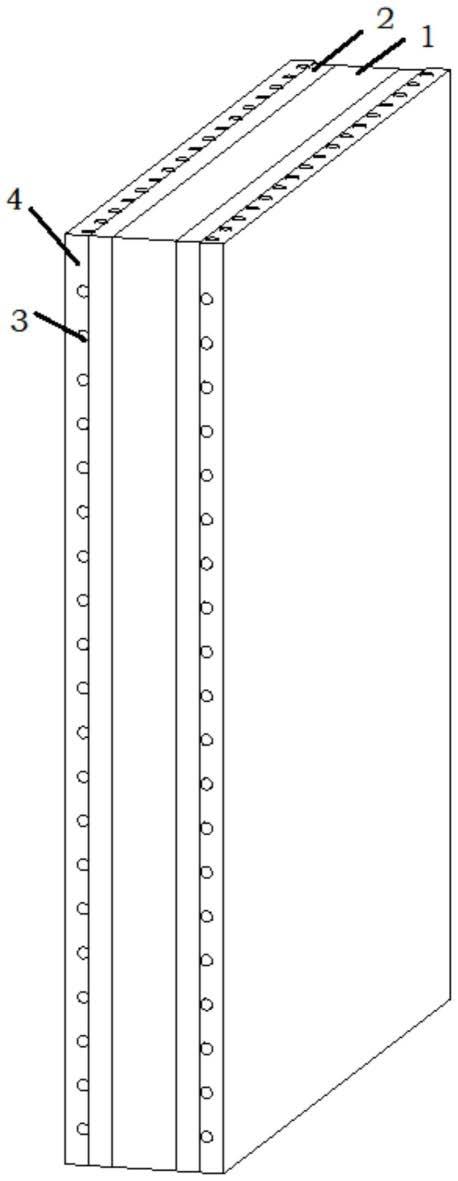
1.一种远程控制爬架的方法,其特征在于,该方法包括:s1、将爬架组件的零部件运输至施工处;s2、在楼层上对爬架组件的零部件进行组装;s3、组装完成后,在爬架组件上安装传感器组件和监控组件,对工程进度等数据进行收集发送,之后对发送的数据进行分析,还可以对施工现场进行远程实时监控。2.根据权利要求1所述的一种远程控制爬架的方法,其特征在于:所述爬架组件包括地面(1)、多个横杆(11)和楼体(7),每两个相对应的所述横杆(11)相互靠近的一侧均匀安装有多个连接杆(13),每两个相对应的所述横杆(11)相互远离的一侧均匀安装有多个竖杆(5),多个所述竖杆(5)的两侧均匀安装有多个安装块(10),每两个相对应的所述安装块(10)的一侧均安装有加固杆(9),多个相对应的所述连接杆(13)的顶部均安装有踩踏板(8),所述横杆(11)上安装有防护组件,所述楼体(7)上安装有支撑组件,所述楼体(7)上安装有定位组件。3.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述防护组件包括防护网(4),多个所述横杆(11)的一侧均螺纹安装有固定螺纹杆(26),多个所述固定螺纹杆(26)的一端均安装有固定挡块(6),每两个相对应的所述固定螺纹杆(26)的外周侧上与所述防护网(4)相接触,所述固定挡块(6)的一侧与所述防护网(4)的一侧相贴合。4.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述支撑组件包括支顶器(25),其中一个所述竖杆(5)的两侧均安装有l形长板(12),两个所述l形长板(12)相互靠近的一侧均匀安装有多个支撑杆(27),所述支顶器(25)安装于所述楼体(7)的顶部,所述支顶器(25)与所述支撑杆(27)相适配。5.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述定位组件包括靠墙u形块(28),所述靠墙u形块(28)安装于所述楼体(7)的一侧,所述靠墙u形块(28)相互靠近的两侧均开设有螺纹孔,两个所述螺纹孔内均螺纹安装有锁定螺纹杆(30),两个所述锁定螺纹杆(30)的一端均贯穿所述螺纹孔,两个所述锁定螺纹杆(30)的另一端均安装有转片(29)。6.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述传感器组件包括第一uwb传感器(2),所述第一uwb传感器(2)安装于所述地面(1)的顶部,所述横杆(11)的底部安装有第二uwb传感器(3),所述第一uwb传感器(2)与所述第二uwb传感器(3)相适配。7.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述监控组件包括摄像头(23),所述竖杆(5)的顶部套设安装有安装套(14),所述安装套(14)的顶部安装有安装板(15),所述安装板(15)的顶部转动安装有转动杆(16),所述转动杆(16)的顶部对称安装有两个夹板(20),两个所述夹板(20)相互靠近的一侧转动安装有转动块(21),所述摄像头(23)安装于所述转动块(21)的顶部,所述摄像头(23)的一侧安装有挡片(24),所述夹板(20)的一侧安装有转向电机(22),所述转向电机(22)的输出轴贯穿所述夹板(20)并与所述转动块(21)的一侧相连接,所述转动杆(16)的外周侧上均匀安装有多个齿牙(17),所述安装板(15)的顶部安装有驱动电机(18),所述驱动电机(18)的输出轴上安装有齿轮(19),所述齿轮(19)与所述齿牙(17)相啮合。8.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述楼体(7)的一侧安装有固定块(31),所述固定块(31)的一侧安装有电动葫芦(33),所述横杆(11)的一侧安
装有固定杆(32),所述固定杆(32)与所述电动葫芦(33)相适配。9.根据权利要求2所述的一种远程控制爬架的方法,其特征在于:所述竖杆(5)的一侧转动安装有插入杆(41),所述插入杆(41)的一端安装有方片(34),所述方片(34)的一侧安装有安装环(35),所述安装环(35)的外周侧上开设有圆通孔,所述圆通孔内滑动安装有移动杆(37),所述移动杆(37)的一端贯穿所述圆通孔并安装有挤压弧块(36),所述移动杆(37)的另一端安装有防脱帽(40),所述方片(34)的底部安装有l形支撑板(39),所述防脱帽(40)上安装有拉力单元。10.根据权利要求9所述的一种远程控制爬架的方法,其特征在于:所述拉力单元包括拉簧(38),所述拉簧(38)套设于所述移动杆(37)上,所述拉簧(38)的一端连接于所述安装环(35)的外周侧上,所述拉簧(38)的另一端连接于所述防脱帽(40)的一侧。
技术总结
本发明公开了一种远程控制爬架的方法,涉及到爬架技术领域,包括S1、将爬架组件的零部件运输至施工处;S2、在楼层上对爬架组件的零部件进行组装;S3、组装完成后,在爬架组件上安装传感器组件和监控组件,对工程进度等数据进行收集发送,之后对发送的数据进行分析,还可以对施工现场进行远程实时监控。本发明中,在需要对工程进行监测时,启动第一uwb传感器和第二uwb传感器,通过第一uwb传感器和第二uwb传感器可以得知爬架距离地面的距离,从而可以分析出工程的进度,同时启动摄像机,摄像机将施工画面实时传输至监控中心,通过摄像机可以实时对施工人员进行监督,需要转动摄像机时,驱动电机启动,带动齿轮转动,在齿牙的配合下,带动转动杆转动。带动转动杆转动。带动转动杆转动。
技术研发人员:张路 陶建伟 何卫东
受保护的技术使用者:广州达蒙安防科技有限公司
技术研发日:2022.10.15
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。