技术特征:
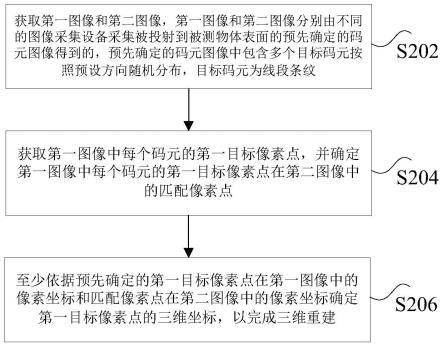
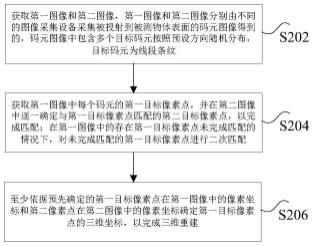
1.一种三维重建方法,其特征在于,包括:获取第一图像和第二图像,所述第一图像和所述第二图像分别由不同的图像采集设备采集被投射到被测物体表面的预先确定的码元图像得到的,所述预先确定的码元图像中包含多个目标码元按照预设方向随机分布,所述目标码元为线段条纹;获取所述第一图像中每个码元的第一目标像素点,并确定所述第一图像中每个码元的第一目标像素点在所述第二图像中的匹配像素点;至少依据预先确定的所述第一目标像素点在所述第一图像中的像素坐标和所述匹配像素点在所述第二图像中的像素坐标确定所述第一目标像素点的三维坐标,以完成三维重建。2.根据权利要求1所述的方法,其特征在于,确定所述第一图像中每个码元的第一目标像素点在所述第二图像中的匹配像素点,包括:确定所述第一目标像素点的像素坐标和所述第一目标像素点的灰度值;在所述第一图像中确定预设面积的第一区域,并将所述第一区域的中心点作为所述第一目标像素点;从第二图像中确定所述预设面积的第二区域,其中,所述第二区域的中心在所述第二图像中的纵坐标与所述第一区域的中心在所述第一图像中的纵坐标相同;从所述第二区域中确定与所述第一目标像素点匹配的匹配像素点。3.根据权利要求2所述的方法,其特征在于,从所述第二区域中确定与所述第一目标像素点匹配的匹配像素点,包括:逐一确定所述第二区域中每个像素点的相关系数;所述相关系数用于表征所述第二区域中的像素点与所述第一目标像素点的相关性;将所述第二区域中所述相关系数最大的像素点确定为所述匹配像素点。4.根据权利要求3所述的方法,其特征在于,逐一确定所述第二区域中每个像素点的相关系数,包括:确定所述第一区域内所有像素点的灰度均值为第一灰度均值,并确定所述第二区域内所有像素点的灰度均值为第二灰度均值;依据所述第一区域内所述第一目标像素点的灰度值与所述第一灰度均值的差和所述第二区域内每个像素点的灰度值与所述第二灰度均值的差,确定所述第二区域中每个像素点与所述第一目标像素点的相关系数。5.根据权利要求3所述的方法,其特征在于,将所述第二区域中相关系数最大的像素点确定为所述匹配像素点,包括:将所述第二区域中所述相关系数最大的像素点确定为候选匹配点;在所述候选匹配点与所述第二图像中的第二目标像素点重合的情况下,将所述候选匹配点确定为所述匹配像素点;在所述候选匹配点与所述第二图像中的第二目标像素点不重合的情况下,将所述候选匹配点周边预设范围内的所述第二目标像素点确定为所述匹配像素点。6.根据权利要求1所述的方法,其特征在于,所述预先确定的码元图像中包含多个目标码元按照预设方向随机分布,所述目标码元为线段条纹,包括:基于所述目标码元的长度、所述目标码元的宽度、所述目标码元之间的间距和所述目
标码元中心像素点的像素坐标确定所述目标码元所在的目标区域,其中,所述目标码元中心像素点的像素坐标在所述码元图像所在区域内随机生成的;遍历所述目标区域内的所有像素点,在所述目标区域中不存在所述目标码元的情况下,在所述目标区域生成所述目标码元,其中所述目标码元至少包括一条预设长度的线段和所述预设长度的线段对应的两个端点;在所述码元图像区域内的所有所述目标区域生成所述目标码元。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:确定所述第一图像中任一码元的第一邻域码元集合和所述所述第二图像中多个候选码元的多个第二邻域码元集合;确定所述多个第二邻域码元集合中的邻域码元与所述第一邻域码元集合中的邻域码元匹配的个数,将所述多个第二邻域码元集合中匹配的个数最多的第二邻域码元集合确定为目标第二邻域码元集合;将所述目标第二邻域码元集合对应的所述候选码元确定为所述目标码元。8.根据权利要求1所述的方法,其特征在于,所述方法还包括:确定所述第一图像中的多个第一目标像素点和所述第二图像中的多个第二目标像素点;将所述多个第一目标像素点与所述第二图像中的多个第二目标像素点一一匹配。9.一种三维重建装置,其特征在于,包括:获取模块,用于获取第一图像和第二图像,所述第一图像和所述第二图像分别由不同的图像采集设备采集被投射到被测物体表面的预先确定的码元图像得到的,所述预先确定的码元图像中包含多个目标码元按照预设方向随机分布,所述目标码元为线段条纹;匹配模块,用于获取所述第一图像中每个码元的第一目标像素点,并确定所述第一图像中每个码元的第一目标像素点在所述第二图像中的匹配像素点;重建模块,用于至少依据预先确定的所述第一目标像素点在所述第一图像中的像素坐标和所述匹配像素点在所述第二图像中的像素坐标确定所述第一目标像素点的三维坐标,以完成三维重建。10.一种三维重建系统,应用于三维重建方法,其特征在于,包括:至少两个图像采集设备、投影设备和第一处理器;所述投影设备用于将预先确定的码元图像投射到被测物体表面;所述至少两个图像采集模块用于从被测物体表面采集所述预先确定的码元图像得到第一图像和第二图像;第一处理器用于获取所述第一图像中每个码元的第一目标像素点,并确定所述第一图像中每个码元的第一目标像素点在所述第二图像中的匹配像素点;还用于至少依据预先确定的所述第一目标像素点在所述第一图像中的像素坐标和所述匹配像素点在所述第二图像中的像素坐标确定所述第一目标像素点的三维坐标,以完成三维重建。11.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行权利要求1至8中任意一项所述的三维重建方法。12.一种电子设备,其特征在于,包括:存储器和处理器;所述处理器用于运行程序,其
中,所述程序运行时执行权利要求1至8中任意一项所述的三维重建方法。
技术总结
本申请公开了一种三维重建方法及装置、系统。其中,该方法包括:获取第一图像和第二图像,第一图像和第二图像分别由不同的图像采集设备采集被投射到被测物体表面的预先确定的码元图像得到的,预先确定的码元图像中包含多个目标码元按照预设方向随机分布,目标码元为线段条纹;获取第一图像中每个码元的第一目标像素点,并确定第一图像中每个码元的第一目标像素点在第二图像中的匹配像素点;至少依据预先确定的第一目标像素点在第一图像中的像素坐标和匹配像素点在第二图像中的像素坐标确定第一目标像素点的三维坐标,以完成三维重建。本申请解决了由于图像不清晰造成的依据码元特征点对码元进行匹配准确率低的技术问题。元特征点对码元进行匹配准确率低的技术问题。元特征点对码元进行匹配准确率低的技术问题。
技术研发人员:陈瀚 赵晓波 张健 黄磊杰 马超
受保护的技术使用者:先临三维科技股份有限公司
技术研发日:2022.08.10
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。