技术特征:
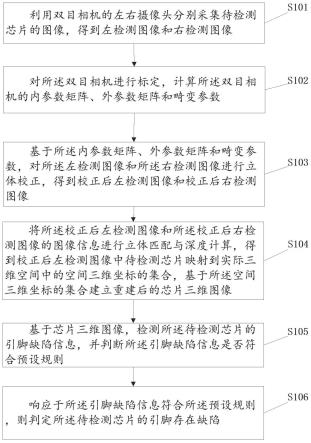
1.一种芯片引脚缺陷的检测方法,其特征在于,包括:利用双目相机的左右摄像头分别采集待检测芯片的图像,得到左检测图像和右检测图像;对所述双目相机进行标定,计算所述双目相机的内参数矩阵、外参数矩阵和畸变参数;基于所述内参数矩阵、外参数矩阵和畸变参数,对所述左检测图像和所述右检测图像进行立体校正,得到校正后左检测图像和校正后右检测图像;将所述校正后左检测图像和所述校正后右检测图像的图像信息进行立体匹配与深度计算,得到校正后左检测图像中待检测芯片映射到实际三维空间中的空间三维坐标,基于所述空间三维坐标建立重建后的芯片三维图像;基于芯片三维图像,检测所述待检测芯片的引脚缺陷信息,并判断所述引脚缺陷信息是否符合预设规则;响应于所述引脚缺陷信息符合所述预设规则,则判定所述待检测芯片的引脚存在缺陷。2.根据权利要求1所述的检测方法,其特征在于,所述对所述双目相机进行标定,计算所述双目相机的内参数矩阵、外参数矩阵和畸变参数,包括:获取棋盘标定板,用双目相机的左右摄像头分别从不同方向拍摄所述棋盘标定板的棋盘图像,获得每个所述棋盘图像中所有内角点的图像坐标及对应的空间三维坐标;将每个所述棋盘图像中所有内角点的图像坐标及对应的空间三维坐标输入预训练的双目相机成像几何模型中,输出所述双目相机的内参数矩阵和外参数矩阵;基于内参数矩阵和外参数矩阵及畸变校正方法,得到所述畸变参数。3.根据权利要求2所述的检测方法,其特征在于,所述基于所述内参数矩阵、外参数矩阵和畸变参数,对所述左检测图像和所述右检测图像进行立体校正,得到校正后左检测图像和校正后右检测图像,包括:将所述外参数矩阵中的旋转矩阵划分为左摄像头的合成旋转矩阵和右摄像头的合成旋转矩阵,将左摄像头和右摄像头各旋转一半,使得左摄像头和右摄像头的光轴平行,实现左摄像头和右摄像头的成像面共面;将所述左摄像头的合成旋转矩阵、所述右摄像头的合成旋转矩阵、所述内参数矩阵、所述外参数矩阵中的平移向量以及每个所述棋盘图像的尺寸信息输入计算机视觉和机器学习软件库中,计算得到校正后数据;将所述校正后数据作为已知常量,基于预设的左右视图校正查找映射表,采用逆向映射的方法,对所述左检测图像和所述右检测图像进行立体校正,得到校正后左检测图像和校正后右检测图像。4.根据权利要求1所述的检测方法,其特征在于,将所述校正后左检测图像和所述校正后右检测图像的图像信息进行立体匹配与深度计算,得到校正后左检测图像中待检测芯片映射到实际三维空间中的空间三维坐标,基于所述空间三维坐标建立重建后的芯片三维图像,包括:基于所述校正后左检测图像和所述校正后右检测图像的图像信息,计算得到所述左检测图像和所述右检测图像在预设视差范围内各像素点的匹配代价;基于所述匹配代价,计算得到各像素点在预设视差范围内的多路径代价聚合值;
基于所述多路径代价聚合值,计算得到各像素点在代价聚合后的视差;基于各像素点在代价聚合后的视差进行视差优化,得到校正后左检测图像视差图;对所述校正后左检测图像视差图进行深度计算,得到校正后左检测图像深度图;基于校正后左检测图像深度图,得到校正后左检测图像中待检测芯片映射到实际三维空间中的空间三维坐标,基于所述空间三维坐标建立重建后的芯片三维图像。5.根据权利要求1所述的检测方法,其特征在于,所述引脚缺陷信息包括引脚数目信息、引脚长度信息和引脚重心信息。6.根据权利要求5所述的检测方法,其特征在于,基于芯片三维图像,检测所述待检测芯片的引脚缺陷信息,并判断所述引脚缺陷信息是否符合预设规则,包括:检测所述引脚数目信息,判断所述引脚数目信息是否符合引脚数目预设规则;检测所述引脚重心信息,判断所述引脚重心信息是否符合引脚偏移预设规则;检测所述引脚长度信息,判断所述引脚长度信息是否符合引脚长度预设规则。7.根据权利要求6所述的检测方法,其特征在于,响应于所述引脚缺陷信息符合所述预设规则,则判定所述待检测芯片的引脚存在缺陷,包括:响应于所述引脚数目信息符合所述引脚数目预设规则、所述引脚重心信息符合引脚偏移预设规则、或所述引脚长度信息符合引脚长度预设规则,则判定所述待检测芯片的引脚存在缺陷。8.一种芯片引脚缺陷的检测装置,其特征在于,包括:图像采集模块,被配置为:利用双目相机的左右摄像头分别采集待检测芯片的图像,得到左检测图像和右检测图像;相机标定模块,被配置为:对所述双目相机进行标定,计算所述双目相机的内参数矩阵、外参数矩阵和畸变参数;立体校正模块,被配置为:基于所述内参数矩阵、外参数矩阵和畸变参数,对所述左检测图像和所述右检测图像进行立体校正,得到校正后左检测图像和校正后右检测图像;立体匹配与三维重建模块,被配置为:将所述校正后左检测图像和所述校正后右检测图像的图像信息进行立体匹配与深度计算,得到校正后检测图像中待检测芯片映射到实际三维空间中的空间三维坐标,基于所述空间三维坐标建立重建后的芯片三维图像;其中,所述校正后检测图像为校正后左检测图像或校正后右检测图像;缺陷检测模块,被配置为:基于芯片三维图像,检测所述待检测芯片的引脚缺陷信息;判定模块,被配置为:响应于所述引脚缺陷信息符合预设规则,则判定所述待检测芯片的引脚存在缺陷。9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任意一项所述的方法。10.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,其特征在于,所述计算机指令用于使计算机执行权利要求1至7任一所述方法。
技术总结
本申请提供一种芯片引脚缺陷的检测方法、检测装置及设备,其中,检测方法包括:图像采集、相机标定、立体校正、立体匹配与三维重建、缺陷检测五部分。本申请提供的一种芯片引脚缺陷的检测方法、检测装置及设备,基于双目相机构建3D模型实现芯片引脚缺陷的检测,经过相机标定及立体校正后,得到校正后的双目相机左摄像头校正后左检测图像中待检测芯片映射到实际三维空间中的空间三维坐标的集合,基于所述空间三维坐标的集合建立重建后的芯片三维图像,完成了3D建模,基于完成的芯片三维图像进行引脚缺陷检测,最终得到检测结果,通过3D建模的方式进行引脚缺陷的检测,可以提高芯片引脚缺陷的效率和准确率,同时非接触式的检测减少芯片损坏。少芯片损坏。少芯片损坏。
技术研发人员:刘净月 徐伟 王坦 席雨 马骁
受保护的技术使用者:航天科工防御技术研究试验中心
技术研发日:2022.08.10
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。