1.本技术涉及车辆技术领域,尤其涉及一种电机的控制方法、装置、电动助力车、电子设备及介质。
背景技术:
2.近年来,电动助力车成为人们较为方便快捷的出行方式之一,其便利性、舒适性是影响用户体验的重要方面。电动助力车通过采集用户踩踏踏板的力的大小从而控制电机出力达到助力的目的,在平路上行驶时电机出力的大小与脚踏出力的大小成比例关系。遇到上坡路段,则需要额外消除重力分力的影响。
3.相关技术中,遇到上坡路段,对于没有安装换挡器的车辆,用户需要踩踏更大的力才能抵消掉重力分力从而使得车辆顺利上坡,很容易给用户带来疲劳、膝盖酸软问题,用户体验差。
技术实现要素:
4.本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本技术的第一个目的在于提出一种电机的控制方法,避免给用户带来疲劳、膝盖酸软问题,提高用户体验。
6.本技术的第二个目的在于提出一种电机的控制装置。
7.本技术的第三个目的在于提出一种电动助力车。
8.本技术的第四个目的在于提出一种电子设备。
9.本技术的第五个目的在于提出一种计算机可读存储介质。
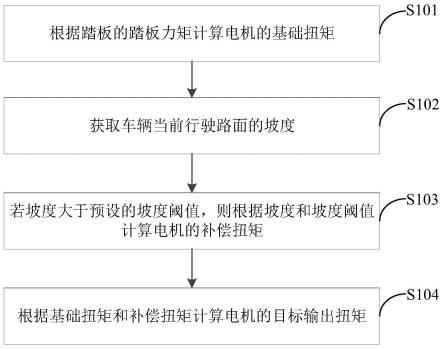
10.为达上述目的,本技术第一方面实施例提出了一种电机的控制方法,包括:根据踏板的踏板力矩计算电机的基础扭矩;获取车辆当前行驶路面的坡度;若所述坡度大于预设的坡度阈值,则根据所述坡度和所述坡度阈值计算所述电机的补偿扭矩;根据所述基础扭矩和所述补偿扭矩计算所述电机的目标输出扭矩。
11.本技术实施例提出的电机的控制方法,根据踏板的踏板力矩计算电机的基础扭矩,获取车辆当前行驶路面的坡度,若坡度大于预设的坡度阈值,则根据坡度阈值计算电机的补偿扭矩,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。通过在根据踏板力矩计算得到的基础扭矩的基础上增加补偿扭矩,补偿扭矩用于抵消掉重力分力的影响,可以避免上坡时给用户带来疲劳、膝盖酸软,提高用户体验。
12.根据本技术的一个实施例,所述电机的控制方法还包括:若所述坡度小于或等于所述坡度阈值,则将所述基础扭矩确定为所述目标输出扭矩。
13.根据本技术的一个实施例,所述根据所述坡度和所述坡度阈值计算所述电机的补偿扭矩,包括:计算所述坡度和所述坡度阈值之间的差值坡度;根据所述差值坡度计算所述补偿扭矩。
14.根据本技术的一个实施例,所述根据所述差值坡度计算所述补偿扭矩,包括:计算
所述差值坡度和预设的第一电机助力比的乘积,得到所述补偿扭矩。
15.根据本技术的一个实施例,所述电机的控制方法还包括:所述坡度阈值的取值范围为2-5度。
16.根据本技术的一个实施例,所述电机的控制方法还包括:通过力矩传感器获取所述踏板力矩;和/或,通过姿态传感器获取所述坡度。
17.根据本技术的一个实施例,所述电机的控制方法还包括:根据所述目标输出扭矩计算所述电机的目标输出电流;根据所述目标输出电流对所述电机进行控制。
18.为达上述目的,本技术第二方面实施例提出了一种电机的控制装置,包括:第一计算模块,用于根据踏板的踏板力矩计算电机的基础扭矩;获取模块,用于获取车辆当前行驶路面的坡度;第二计算模块,用于若所述坡度大于预设的坡度阈值,则根据所述坡度和所述坡度阈值计算所述电机的补偿扭矩;第三计算模块,用于根据所述基础扭矩和所述补偿扭矩计算所述电机的目标输出扭矩。
19.本技术实施例提出的电机的控制装置,根据踏板的踏板力矩计算电机的基础扭矩,获取车辆当前行驶路面的坡度,若坡度大于预设的坡度阈值,则根据坡度阈值计算电机的补偿扭矩,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。通过在根据踏板力矩计算得到的基础扭矩的基础上增加补偿扭矩,补偿扭矩用于抵消掉重力分力的影响,可以避免上坡时给用户带来疲劳、膝盖酸软,提高用户体验。
20.根据本技术的一个实施例,所述电机的控制装置还包括:确定模块,用于若所述坡度小于或等于所述坡度阈值,则将所述基础扭矩确定为所述目标输出扭矩。
21.根据本技术的一个实施例,所述第二计算模块具体用于:计算所述坡度和所述坡度阈值之间的差值坡度;根据所述差值坡度计算所述补偿扭矩。
22.根据本技术的一个实施例,所述第二计算模块具体用于:计算所述差值坡度和预设的第一电机助力比的乘积,得到所述补偿扭矩。
23.根据本技术的一个实施例,所述坡度阈值的取值范围为2-5度。
24.根据本技术的一个实施例,所述获取模块具体用于:通过力矩传感器获取所述踏板力矩;和/或,通过姿态传感器获取所述坡度。
25.根据本技术的一个实施例,所述第三计算模块还用于:根据所述目标输出扭矩计算所述电机的目标输出电流;根据所述目标输出电流对所述电机进行控制。
26.为达上述目的,本技术第三方面实施例提出了一种电动助力车,包括:如本技术第一方面实施例所述的电机的控制装置。
27.为达上述目的,本技术第四方面实施例提出了一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时,实现如本技术第一方面实施例所述的电机的控制方法。
28.为达上述目的,本技术第五方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本技术第一方面实施例所述的电机的控制方法。
附图说明
29.图1是根据本技术一个实施例的电机的控制方法的流程示意图;
30.图2是根据本技术另一个实施例的电机的控制方法的流程示意图;
31.图3是根据本技术另一个实施例的电机的控制方法的流程示意图;
32.图4是本技术实施例的电机的控制方法的车辆零部件框图;
33.图5是本技术实施例的车辆的结构示意图一;
34.图6是本技术实施例的车辆的结构示意图二;
35.图7是根据本技术另一个实施例的电机的控制方法的流程示意图;
36.图8是本技术一个实施例的电机的控制装置的结构示意图;
37.图9是本技术一个实施例的电动助力车的示意图;
38.图10是本技术一个实施例的电子设备的示意图。
具体实施方式
39.下面详细描述本技术的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
40.下面结合附图来描述本技术实施例的电机的控制方法、装置、电动助力车、电子设备及介质。
41.图1是根据本技术一个实施例的电机的控制方法的流程示意图。本技术实施例的电机的控制方法,可由本技术实施例提供的电机的控制装置执行,电机的控制装置可以设置在具有踏板的车辆,例如电动助力车(ebike)上,具体可设置在控制器内的微控制单元(microcontroller unit,简称mcu)中。如图1所示,本技术实施例的电机的控制方法具体可包括以下步骤:
42.s101,根据踏板的踏板力矩计算电机的基础扭矩。
43.本技术实施例中,车辆上设置有供用户踩踏的踏板,车辆根据检测踏板的踩踏力,控制电机出力(即电机的基础扭矩)从而达到助力的目的。具体可通过安装在车辆五通处的力矩传感器,采集骑行者踩踏踏板的踏板力矩f的大小,本领域技术人员可以理解,也可以通过其他力矩采集装置采集踏板力矩f,本技术实施例对此不做过多限定。
44.根据采集到的踏板力矩f计算电机的基础扭矩t1,具体可通过以下方式计算得到:t1=k1*f,其中,k1是电机的第二电机助力比,k1可预先设置,假设k1=1,那么骑行者的脚出一份力,电机也将出一份力。
45.s102,获取车辆当前行驶路面的坡度。
46.本技术实施例中,当车辆行驶到上坡路况时,受重力分力的影响,需要骑行者踩踏更大的力才能抵消掉重力分力的影响,使车辆顺利上坡。因此,本技术实施例中通过获取车辆当前行驶路面的坡度angle,以判断是否需要调整电机出力。具体可通过安装在车辆控制器上的姿态传感器(inertial measurement unit,简称imu)采集当前行驶路面的坡度angle,本领域技术人员可以理解,也可以通过其他坡度采集装置采集当前行驶路面的坡度angle,本技术实施例对此不做过多限定。
47.s103,若坡度大于预设的坡度阈值,则根据坡度和坡度阈值计算电机的补偿扭矩。
48.本技术实施例中,可以预先设置一个坡度阈值angle_start,该坡度阈值angle_start为车辆受重力分力的影响的临界值,即若步骤s102获取到的当前行驶路面的坡度
angle大于预设的坡度阈值angle_start,则需要调整电机出力以消除重力分力的影响。具体可根据坡度angle和坡度阈值angle_start计算电机的补偿扭矩t2。坡度阈值angle_start的取值范围根据需要可设置为2-5度,例如3度。
49.s104,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。
50.本技术实施例中,目标输出扭矩即最终控制电机输出的扭矩。根据步骤s101计算得到的基础扭矩t1和步骤s103计算得到的补偿扭矩t2,计算电机的目标输出扭矩t。例如,目标输出扭矩t=基础扭矩t1 补偿扭矩t2。
51.本技术实施例的电机的控制方法,根据踏板的踏板力矩计算电机的基础扭矩,获取车辆当前行驶路面的坡度,若坡度大于预设的坡度阈值,则根据坡度阈值计算电机的补偿扭矩,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。通过在根据踏板力矩计算得到的基础扭矩的基础上增加补偿扭矩,补偿扭矩用于抵消掉重力分力的影响,在上坡时骑行者的脚部用力和平路时基本是一致的,不需要骑行者额外用力,从而可以避免上坡时给用户带来疲劳、膝盖酸软,提高用户体验。另外,车辆在斜坡上零速起步时,骑行者更加容易起步。
52.图2为根据本技术另一个实施例的电机的控制方法的流程示意图。如图2所示,在上述图1所示实施例的基础之上,本技术实施例的电机的控制方法具体可包括以下步骤:
53.s201,根据踏板的踏板力矩计算电机的基础扭矩。
54.s202,获取车辆当前行驶路面的坡度。
55.s203,若坡度大于预设的坡度阈值,则根据坡度和坡度阈值计算电机的补偿扭矩。
56.s204,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。
57.本技术实施例中,步骤s201-s204与上述实施例中的步骤s101-s104相同,具体过程此处不再赘述。
58.s205,若坡度小于或等于坡度阈值,则将基础扭矩确定为目标输出扭矩。
59.本技术实施例中,坡度小于或等于坡度阈值时,车辆几乎不受重力分量的影响,因此无需增加额外的补偿扭矩,即将根据踏板力矩计算得到的基础扭矩确定为目标输出扭矩。
60.进一步的,本技术实施例的电机的控制方法还可以包括以下步骤s206-s207,以实现根据目标输出扭矩对电机进行控制。
61.s206,根据目标输出扭矩计算电机的目标输出电流。
62.本技术实施例中,为使得电机输出的扭矩为目标输出扭矩t,需要根据目标输出扭矩t计算出电机的目标输出电流i,具体可通过以下方式计算得到:目标输出扭矩t=扭矩常数k2*目标输出电流i。
63.s207,根据目标输出电流对电机进行控制。
64.进一步的,如图3所示,上述步骤s203具体可包括以下步骤:
65.s301,计算坡度和坡度阈值之间的差值坡度。
66.本实施例中,计算上述步骤s202中获取的车辆当前行驶路面的坡度angle,与预先设置的坡度阈值angle_start之间的坡度差值(angle-angle_start)。
67.s302,根据差值坡度计算补偿扭矩。
68.本实施例中,可以根据差值坡度和预设的第一电机助力比的乘积,得到补偿扭矩。
计算差值坡度(angle-angle_start)和预设的第一电机助力比k3的乘积,得到补偿扭矩t2=k3*(angle-angle_start)。
69.本技术实施例的电机的控制方法,根据踏板的踏板力矩计算电机的基础扭矩,获取车辆当前行驶路面的坡度,若坡度大于预设的坡度阈值,则根据坡度阈值计算电机的补偿扭矩,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。通过在根据踏板力矩计算得到的基础扭矩的基础上增加补偿扭矩,补偿扭矩用于抵消掉重力分力的影响,在上坡时骑行者的脚部用力和平路时基本是一致的,不需要骑行者额外用力,从而可以避免上坡时给用户带来疲劳、膝盖酸软,提高用户体验。另外,车辆在斜坡上零速起步时,骑行者更加容易起步。
70.为清楚说明本技术实施例的电机的控制方法,下面通过图4-图7所示的具体示例进行详细说明。
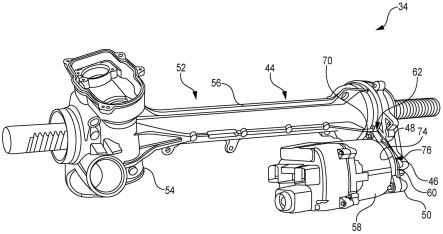
71.图4为本技术实施例的电机的控制方法的车辆零部件框图,如图4所示,包括控制器41、姿态传感器imu42、力矩传感器43、踏板44和电机45。图5为本技术实施例的车辆的结构示意图一,如图5所示,包括踏板44和电机45。图6为本技术实施例的车辆的结构示意图二,如图6所示,包括力矩传感器43和控制器41。
72.图7为根据本技术另一个实施例的电机的控制方法的流程示意图。如图7所示,本技术实施例的电机的控制方法具体可包括以下步骤:
73.s701,根据踏板的踏板力矩计算电机的基础扭矩。
74.s702,获取车辆当前行驶路面的坡度。
75.s703,判断坡度是否大于预设的坡度阈值。若是,则执行步骤s704。若否,则执行步骤s707。
76.s704,计算坡度和坡度阈值之间的差值坡度。继续执行步骤s705。
77.s705,根据差值坡度计算补偿扭矩。
78.s706,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。
79.s707,将输出扭矩确定为目标输出扭矩。
80.s708,根据目标输出扭矩计算电机的目标输出电流。
81.s709,根据目标输出电流对电机进行控制。
82.为了实现上述实施例,本技术实施例还提出一种电机的控制装置,该电机的控制装置可实现上述任一实施例的电机的控制方法。如图8所示,本技术实施例提出的电机的控制装置具体可包括:第一计算模块81、获取模块82、第二计算模块83和第三计算模块84。
83.其中:
84.第一计算模块81,用于根据踏板的踏板力矩计算电机的基础扭矩。
85.获取模块82,用于获取车辆当前行驶路面的坡度。
86.第二计算模块83,用于若所述坡度大于预设的坡度阈值,则根据所述坡度和所述坡度阈值计算所述电机的补偿扭矩。
87.第三计算模块84,用于根据所述基础扭矩和所述补偿扭矩计算所述电机的目标输出扭矩。
88.进一步的,在本技术实施例一种可能的实现方式中,本技术实施例的电机的控制装置还可包括:确定模块85,用于若坡度小于或等于坡度阈值,则将基础扭矩确定为目标输
出扭矩。
89.进一步的,在本技术实施例一种可能的实现方式中,第二计算模块83具体用于:计算坡度和坡度阈值之间的差值坡度;根据差值坡度计算补偿扭矩。
90.进一步的,在本技术实施例一种可能的实现方式中,第二计算模块83具体用于:计算差值坡度和第一电机助力比的乘积,得到补偿扭矩。
91.进一步的,在本技术实施例一种可能的实现方式中,坡度阈值的取值范围为2-5度。
92.进一步的,在本技术实施例一种可能的实现方式中,获取模块82具体用于:通过力矩传感器获取踏板力矩;和/或,通过姿态传感器获取坡度。
93.进一步的,在本技术实施例一种可能的实现方式中,第三计算模块84还用于:根据目标输出扭矩计算电机的目标输出电流;根据目标输出电流对电机进行控制。
94.需要说明的是,前述对电机的控制方法实施例的解释说明也适用于该实施例的电机的控制装置,此处不再赘述。
95.本技术实施例的电机的控制装置,根据踏板的踏板力矩计算电机的基础扭矩,获取车辆当前行驶路面的坡度,若坡度大于预设的坡度阈值,则根据坡度阈值计算电机的补偿扭矩,根据基础扭矩和补偿扭矩计算电机的目标输出扭矩。通过在根据踏板力矩计算得到的基础扭矩的基础上增加补偿扭矩,补偿扭矩用于抵消掉重力分力的影响,在上坡时骑行者的脚部用力和平路时基本是一致的,不需要骑行者额外用力,从而可以避免上坡时给用户带来疲劳、膝盖酸软,提高用户体验。另外,车辆在斜坡上零速起步时,骑行者更加容易起步。
96.为了实现上述实施例,本技术实施例还提出一种电动助力车90,如图9所示,该电动助力车90包括如上述实施例所示的电机的控制装置91。
97.为了实现上述实施例,本技术实施例还提出一种电子设备100,如图10所示,该电子设备100具体可包括存储器101、处理器102及存储在存储器101上并可在处理器102上运行的计算机程序,处理器102执行程序时,实现如上述实施例所示的电机的控制方法。
98.为了实现上述实施例,本技术实施例还提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以实现如上述实施例所示的电机的控制方法。
99.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
100.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。