1.本发明涉及演讲的讲台,尤其涉及讲台自动调节高度的方法。
背景技术:
2.在教学、演讲等场景中,讲台的使用率非常高,而主讲人身高存在较大差异,讲台的高度仅能适应身高普通的主讲人,对其他主讲人来说讲台台面不是偏高就是偏低,使用时不够舒适。现有市场上有一些带升降功能的讲台,可以调节讲台的高度,其中有中国专利公开号为cn107772798a,名称为一种身高感应自动升降讲台,包括讲台面板,x型支架,固定底座、感应器等,该专利是通过感应器控制x型支架升降的,升降主讲人所站立的平台实现调整主讲人相对于地面的高度;又有中国专利公开号为cn202436465u,名称为一种根据身高自动升降的讲桌,采用图形识别传感器和超声波测距传感器,但缺少与步进电机配合的一个判定和计算的部件,也未对如何判定人体身高以及如何控制步进电机的启停做出详细描述,所以该专利技术交待很不完整。
技术实现要素:
3.本发明为了解决讲台高度自动适应主讲人身高的问题,提供一种讲台自动调节高度的方法,方法能够自动检测主讲人身高,并按测定的主讲人身高自动调节台面高度,给主讲人有一个最舒适的演讲桌台。
4.本发明方法解决上述技术问题所采用的技术方案为 :一种讲台自动调节高度的方法,由底座、电动升降器、台面组成一个台面升降的硬件组合,同时配备一套由中央控制器、台面激光测距模块、红外感应模块、人体身高激光测距模块组成的一个检测和控制组合,其特征在于:有中央控制器连接台面激光测距模块、红外感应模块、人体身高激光测距模块,和电动升降机,接受台面激光测距模块、红外感应模块、人体身高激光测距模块发来的数据,最后将运算的结果输出给电动升降机,由电动升降机内的升降杆联动台面升和降,使台面高度适应主讲人的身高。
5.所述的硬件和模块的互相位置:电动升降器垂直固定在底座上,台面固定在电动升降器的升降杆顶端。在台面的下方装上台面激光测距模块,将中央控制器安装在底座上、红外感应模块和人体身高激光测距并列安装在主讲人所在区域位置的顶部天花板。
6.所述的台面激光测距模块检测台面与地的距离。
7.所述的红外感应模块检测主讲人有没有进入讲台区域。
8.所述的人体身高激光测距模块检测人头顶与模块的距离。
9.所述的电动升降器控制台面的升降。
10.讲台高度自动调节过程如下:在讲台安装完毕后,由人体身高激光测距模块测量模块距离地面的高度,得到的数据作为固定数据输入到中央控制器储存,当主讲人进入到主讲人的常态位置时,即进入红外感应区域位置时,红外感应模块启动人体身高激光测距模块,开始测量人体头顶到模块的距离,经过反复测量、在取得比较稳定数据后,人体身高
激光测距模块再将数据发送给中央控制器,这样稳定数据后再发送数据是设定是为了避免主讲人有偶然的弯腰、低头、屈膝等动作带来干扰因素,避免出现台面反复升降导致台面出现抖动现象。
11.中央控制器在收到人体身高激光测距模块提交的人头顶的距离数据后,比较已经储存的模块与地面距离的固定数据,计算得出人体身高数据,再按照预置设定的公式计算出当时台面应该达到的目标高度;由于台面激光测距模块测量台面当时的实际高度数据已经储存在中央控制器,所以中央控制器依据台面的实际高度、台面的目标高度的差值即刻判定台面应该是升高、还是降低、或保持原有位置。
12.中央控制器最终判定台面需要升高或降低时,会输出控制信号给电动升降器,电动升降器启动,实现台面的升或降,同时台面激光测距模块不断向中央控制器发送台面的即时高度,直到最终台面即时高度达到中央控制器计算的目标高度时,中央控制器停止输出控制信号,电动升降器停止工作,台面高度就维持不变了,台面激光测距模块也停止工作,那时的红外感应模块和人体身高激光测距模块开始进入间隔时间的检测模式,自动适应主讲人换人,或主讲人站立、坐下等不同姿态的调整。
13.本发明的有益效果:本方法采用电动升降器的讲台及配套的检测和控制机构,实现讲台台面的高度随着主讲人的身高自动调节,避免因主讲人身高和台面高度不匹配带来的尴尬,为主讲人提供了舒适的演讲环境,降低主讲人的疲劳程度,给主讲人带来很好的体验。
附图说明
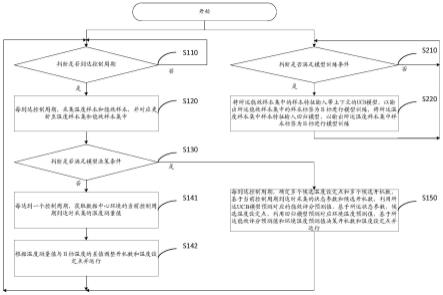
14.图 1 为本发明一种讲台自动调节高度的方法架构示意图。
具体实施方式
15.以下结合附图1以一个实施例对本发明作进一步详细描述。
16.如图1 所示,本实施例的一种讲台自动调节高度的方法,由底座1、电动升降器2、台面3组成一个台面3升降的硬件组合,同时配备一套由中央控制器4、台面激光测距模块5、红外感应模块6、人体身高激光测距模块7组成的一个检测和控制组合,其特征在于:有中央控制器4连接台面激光测距模块5、红外感应模块6、人体身高激光测距模块7,和电动升降机2,接受台面激光测距模块5、红外感应模块6、人体身高激光测距模块7发来的数据,最后将运算的结果输出给电动升降机2,由电动升降机2内的升降杆联动台面3升和降,使台面3高度适应主讲人的身高。
17.所述的硬件和模块的互相位置:电动升降器2垂直固定在底座1上,台面3固定在电动升降器2的升降杆顶端。在台面3的下方装上台面激光测距模块5,将中央控制器4安装在底座1上、红外感应模块6和人体身高激光测距7并列安装在主讲人所在区域位置的顶部天花板8。
18.所述的台面激光测距模块5检测台面3与地的距离。
19.所述的红外感应模块6检测主讲人有没有进入讲台区域。
20.所述的人体身高激光测距模块7检测人头顶与模块的距离。
21.所述的电动升降器2通过升降杆来控制台面3的升降。
22.讲台高度自动调节过程如下:在讲台安装完毕后,由人体身高激光测距模块7测量模块距离地面的高度,得到的数据作为固定数据输入到中央控制器4储存,当主讲人进入到主讲人的常态位置时,即进入红外感应区域位置时,红外感应模块6启动人体身高激光测距模块,开始测量人体头顶到模块的距离,经过反复测量、在取得比较稳定数据后,人体身高激光测距模块7再将数据发送给中央控制器4,这样稳定数据后再发送数据是设定是为了避免主讲人有偶然的弯腰、低头、屈膝等动作带来干扰因素,避免出现台面3反复升降导致台面3出现抖动现象。
23.中央控制器4在收到人体身高激光测距模块7提交的人头顶的距离数据后,比较已经储存的模块与地面距离的固定数据,计算得出人体身高数据,再按照预置设定的公式计算出当时台面应该达到的目标高度;由于台面激光测距模块5测量台面当时的实际高度数据已经储存在中央控制器4,所以中央控制器4依据台面3的实际高度、台面3的目标高度的差值即刻判定台面3应该是升高、还是降低、或保持原有位置。
24.中央控制器4最终判定台面3需要升高或降低时,会输出控制信号给电动升降器2,电动升降器2启动,实现台面3的升或降,同时台面激光测距模块5不断向中央控制器4发送台面3的即时高度,直到最终台面3即时高度达到中央控制器4计算的目标高度时,中央控制器4停止输出控制信号,电动升降器2停止工作,台面3高度就维持不变了,台面激光测距模块5也停止工作,那时的红外感应模块6和人体身高激光测距模块7开始进入间隔时间的检测模式,自动适应主讲人换人,或主讲人站立、坐下等不同姿态的调整。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。