技术特征:
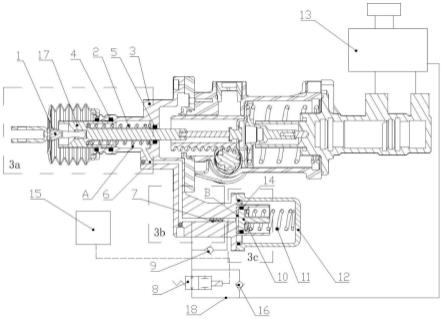
1.一种线控制动系统用的踏板感觉模拟装置,其特征在于,包括:球头推杆(1),一端与制动踏板连接,另一端与推杆活塞(17)以球铰方式连接,由球头推杆(1)传递制动踏板的动作,从而带动推杆活塞(17)移动;推杆活塞(17),与模拟器主腔体(3)形成推杆腔(a);模拟腔活塞(10),与模拟器主腔体(3)形成模拟腔(b);模拟器主腔体(3),模拟器主腔体(3)分为模拟器主腔体前段(3a)、模拟器主腔体中段(3b)、模拟器主腔体后段(3c)三部分;所述模拟器主腔体前段(3a)与推杆活塞(17)形成推杆腔(a),所述模拟器主腔体后段(3c)与模拟腔活塞(10)形成模拟腔(b),所述模拟器主腔体中段(3b)内设置有第一流道(6),将推杆腔(a)与模拟腔(b)连通;模拟器主腔体前段(3a)、模拟器主腔体中段(3b)、模拟器主腔体后段(3c)三部分可以制作成一个整体零件,也可以制作成分体的两个部分:推杆腔体(19)和模拟腔体(20),也可以将所述模拟器主腔体中段(3b)替换成中通管路元件(21)两端分别与模拟器主腔体前段(3a)、模拟器主腔体后段(3c)连接,并使推杆腔(a)与模拟腔(b)连通;推杆腔(a)、模拟腔(b)、第一流道(6)中填充有液压油;储液罐(13),用于存储液压油;电磁阀(8),设置在所述储液罐(13)与踏板腔(a)之间的第二流道(18)上;负载底座(12),与模拟器主腔体(3)连接,为负载弹力装置(11)提供支撑;负载弹力装置(11),设置在模拟腔活塞(10)与负载底座(12)之间,为模拟腔活塞(10)提供弹性力负载。2.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:在所述推杆活塞(17)和所述模拟器主腔体前段(3a)之间至少设置有两个密封元件,其中,第一密封元件(4),设置在靠近所述推杆腔(a)入口位置,安置于所述模拟器主腔体前段(3a)内壁的密封圈槽内,或安置于所述推杆活塞(17)外周的密封圈槽内;第二密封元件(5),设置在靠近所述推杆腔(a)底部位置,安置于所述模拟器主腔体前段(3a)内壁的密封圈槽内,或安置于所述推杆活塞(17)外周的密封圈槽内;在所述模拟腔活塞(10)和所述模拟器主腔体后段(3c)之间设置第三密封元件(14),设置在所述模拟腔活塞(10)外周的密封圈槽内,或安置于所述模拟器主腔体后段(3c)内壁的密封圈槽内。3.如权利要求1至2所述的线控制动系统用的踏板感觉模拟装置,其特征在于:所述第一密封元件(4)和/或所述第二密封元件(5)和/或所述第三密封元件(14)可以是唇形密封圈、y型密封圈、星型密封圈、异型密封圈或o型圈;为了加强密封效果,所述第一密封元件(4)处和/或所述第二密封元件(5)处和/或所述第三密封元件(14)处可以采用两个或多个密封元件。4.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:在所述推杆活塞(17)内部和/或外周设置推杆弹力装置(2),所述推杆弹力装置(2)一端抵住所述推杆活塞(17),另一端抵住所述模拟器主腔体(3)。5.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:在所述电磁阀(8)的两端并联有第一单向阀(16)。6.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:在所述第一流道(6)上设置节流阀(7),设置在所述电磁阀(8)与所述模拟腔(b)之间。
7.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:所述踏板感觉模拟装置还包括电磁阀控制单元(15),通过线束与所述电磁阀(8)相连,控制所述电磁阀(8)的开闭;所述电磁阀控制单元(15)可以独立存在,也可以与所述线控制动系统的控制单元集成在一起。8.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:在所述节流阀(7)的两端并联有第二单向阀(9)。9.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:使用制动液作为液压传动工作介质,踏板感觉模拟装置的储液罐可与制动主缸的储液罐集成在一起。10.如权利要求1所述的线控制动系统用的踏板感觉模拟装置,其特征在于:所述电磁阀(8)为常开阀。
技术总结
本发明涉及一种线控制动系统用的踏板感觉模拟装置,包括:推杆活塞与模拟器主腔体,组成推杆腔,模拟腔活塞与模拟器主腔体,组成模拟腔,推杆腔与模拟腔由流道相连通,其中充满液压油;在推杆活塞和/或模拟腔活塞处设置弹力装置;在储液罐与模拟器主腔体之间的流道上设置电磁阀,用于控制流道的通断;电磁阀控制单元,用于控制电磁阀动作。本发明通过弹力装置和液压装置的结合,可提供制动踏板感觉所需的刚度和阻尼特性,实现更加舒适的制动踏板感觉,同时可提高助力失效状态下的应急制动响应速度和制动效能。速度和制动效能。速度和制动效能。
技术研发人员:舒强 熊璐 徐国栋 李世鹏 余卓平 赵欣宇 高岩 江琛裕 胡龙敏 檀旋
受保护的技术使用者:上海同驭汽车科技有限公司
技术研发日:2021.06.08
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。