1.本技术涉及混凝土搅拌领域,尤其是涉及一种混凝土混合装置
背景技术:
2.预拌混凝土是指由水泥、集料、水以及根据需要掺入的外加剂、矿物掺合料等组分按一定比例,在搅拌站经计量、拌制后出售的并采用搅拌车,在规定时间内运至使用地点的混凝土拌合物,并且在运输的过程中,混凝土也在搅拌罐中不断搅拌防止凝固,因而产品质量好、材料消耗少、工效高、成本较低,又能改善劳动条件,减少环境污染。
3.在搅拌车到达工地后,混凝土通过螺旋输送杆被排出至滑道上,混凝土通过滑道进行卸料;若混凝土需要浇筑在一个车辆可以驶过的平面上,车辆则会边行驶边卸料。
4.针对上述相关技术,发明人认为,混凝土从车体上卸下之后会产生堆尖,工人还需要将混凝土沿垂直车体运动的方向将混凝土铺平,铺平过程较慢,影响施工效率。
技术实现要素:
5.为了使滑道能自动摇摆而将混凝土引导至不同位置,本技术提供一种混凝土混合装置。
6.本技术提供的一种混凝土混合装置,采用如下的技术方案:
7.一种混凝土混合装置,包括车体,所述车体上转动连接有搅拌罐,所述搅拌罐上设有料斗和物料口,所述车体在所述物料口下方设有用于引导混凝土流出的滑道,所述滑道包括引导板和安装杆,所述引导板用于引导混凝土流出;所述安装杆转动连接在所述车体上,所述安装杆的转动轴线沿竖直方向设置;所述引导板连接在所述安装杆安装杆上,所述安装杆转动以带动所述引导板转动;所述车体上还设有用于驱动安装杆转动的驱动件。
8.通过采用上述技术方案,当混凝土卸料时,启动驱动件,通过驱动件驱使滑道摇摆,从而将混凝土送至不同位置,避免混凝土堆尖,方便工人将混凝土铺平。
9.可选的,所述驱动件包括伺服电机,所述伺服电机固定连接在所述车体上,所述电机的输出端与所述安装杆固定连接。
10.通过采用上述技术方案,伺服电机转动从而带动安装杆转动,安装杆转动带动引导板转动。
11.可选的,所述引导板与所述安装杆转动连接,所述引导板的转动轴线沿水平方向设置;所述安装杆上还设有驱动所述引导板转动的气缸。
12.通过采用上述技术方案,当搅拌罐中混凝土存量减少时,转动引导板从而改变引导板的坡度,从而使混凝土落在地面的速度不会随着搅拌罐中混凝土存量的减少而减小。
13.可选的,所述引导板包括连接板与滑动板,所述连接板转动连接在所述安装杆上,所述滑动板沿所述引导板长度方向滑动连接在所述引导板上;所述气缸的伸缩端与所述滑动板铰接,所述气缸的另一端与所述安装杆固定连接。
14.通过采用上述技术方案,使引导板可以通过滑动板滑动的改变长度,使引导板可
以将混凝土引导至更远的地方,可以更快铺平较宽的路面。
15.可选的,所述连接板远离所述安装杆的端面与内壁之间设有倒角。
16.通过采用上述技术方案,当滑动杆收入连接板时,连接板的外壁可以将滑动杆的内壁上残留的混凝土刮下。
17.可选的,所述连接板上沿自身长度方向滑动连接有滑杆,所述滑杆上转动连接有刮板,所述刮板转动轴线沿所述滑杆长度方向设置,所述刮板转动以抵接所述连接板内壁。
18.通过采用上述技术方案,滑动刮板可以清理连接板内壁残留的混凝土。
19.可选的,所述刮板包括刀体与转动板,所述刀体沿垂直所述滑杆轴线方向插接在所述转动板上。
20.通过采用上述技术方案,当刀体磨损时可以将刀体拆卸更换。
21.可选的,所述连接板与所述滑动板内壁均涂有疏水涂层。
22.通过采用上述技术方案,可以减少连接板与滑动板内壁上残留混凝土。
23.综上所述,本技术包括以下有益技术效果:
24.1.本技术通过驱动件与安装杆的设置,使混凝土能被卸下至不同的位置,方便工人将混凝土铺平;
25.2.本技术通过气缸、连接板与滑动板的设置,使引导板能伸长从而将混凝土引导至更远的地方,并且不会与地面干涉。
附图说明
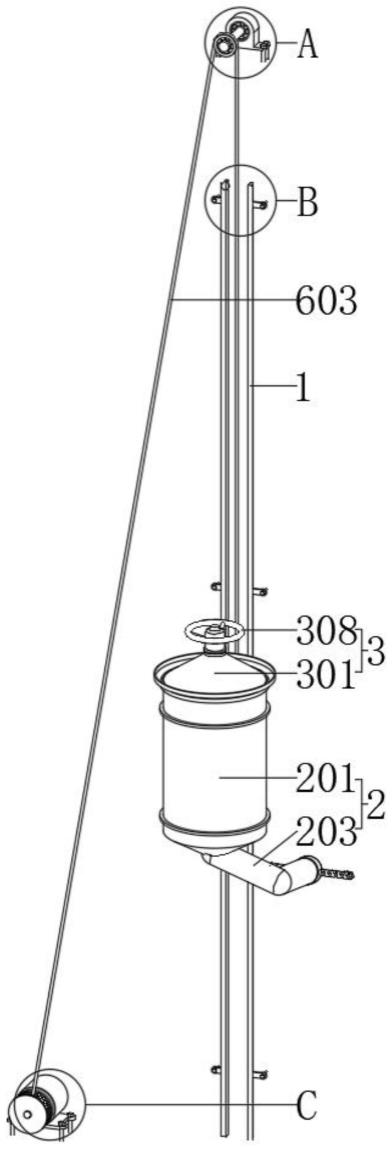
26.图1是本技术一种混凝土混合装置的整体结构图;
27.图2是图1中部分结构图;
28.图3是图1中部分结构图。
29.附图标记说明:
30.1、车体;11、搅拌罐;12、料斗;13、物料口;2、滑道;21、引导板;211、连接板;212、滑动板;22、安装杆;23、伺服电机;24、气缸;31、滑杆;32、刮板;321、转动板;322、刀体;33、防转螺丝。
具体实施方式
31.以下结合附图1-3对本技术作进一步详细说明。
32.本技术实施例公开一种混凝土混合装置。参照图1和图2,一种混凝土混合装置,包括车体1,车体1上转动连接有搅拌罐11,搅拌罐11上设有料斗12与物料口13,车体1在物料口13的下方设有滑道2,在卸下混凝土时,混凝土通过滑道2落在地面上。
33.为了使混凝土在地面上后能降低堆尖高度,使工人能快速的将混凝土铺平在地面上,将滑道2分为安装杆22与引导板21,安装杆22转动连接在车体1上,安装杆22的转动轴线沿竖直方向设置,引导板21连接在安装杆22上,并且在车体1上安装有驱动安装杆22转动的驱动件,驱动件为伺服电机23,当伺服电机23启动时,安装杆22转动,引导板21跟随安装杆22转动,从而使引导板21远离车体1的一端在水平平面上做圆弧运动,从而将混凝土引导不同位置,方便工人将混凝土铺平。
34.在另一实施例中,驱动件还可以是摇摆气缸,摇摆气缸固定在车体1上,摇摆气缸
的伸缩端与滑道2连接,通过摇摆气缸的伸缩带动滑道2的转动。
35.在本实施例中,考虑到搅拌罐11排出混凝土的速度会随着罐体中混凝土体积的减小而减小,因此为了能让车体1在运动时,可以将混凝土在车体1运动方向上将混凝土更均匀的排出至地面,需要将滑道2赋予一个竖直平面内的转动,从而改变滑道2的坡度,以此改变混凝土下落的速度;引导板21转动连接在安装杆22上,引导板21的转动轴线沿水平方向设置,并在安装杆22上固定连接有气缸24,气缸24的伸缩端铰接在引导板21上,通过气缸24的伸缩即可改变滑道2的坡度。
36.为了能使引导板21远离车体1的一端在水平平面内所作圆弧运动的曲率半径更大,能将混凝土送至更远的地方,将引导板21设置成可伸缩结构,引导板21分为连接板211与滑动板212,其中连接板211转动连接在安装杆22上,滑动板212沿连接板211长度方向滑动连接在连接板211上,并且滑动板212内壁包裹连接板211外壁,气缸24的伸缩端铰接在滑动板212上,此结构还能将引导板21的伸缩与引导板21的转动关联起来,使引导板21能够自动伸缩;因此当气缸24伸出时,滑动板212自动滑出连接板211完成引导板21的伸长,当气缸24收缩时,滑动板212自动收入连接板211,完成引导板21的收缩。
37.参照图3,为了能将连接板211上残留的混凝土刮下,在连接板211的两侧壁上沿自身长度方向开设有滑槽,滑槽中滑动连接有滑杆31,滑杆31与滑槽连接部分的截面为矩形;滑杆31上还转动连接有刮板32,刮板32的转动轴线沿滑杆31长度方向设置;刮板32上设有防转螺丝33;防转螺丝33用于同时穿设在刮板32与滑杆31上一限制刮板32的转动;当混凝土正在卸料时,取下防转螺丝33,当混凝土经过刮板32时,刮板32会被翻起,因此不影响混凝土的卸料,当需要清理连接板211上残留的混凝土时,沿连接板211长度方向滑动刮板32即可将残留混凝土刮下,此时防转螺丝33的作用则是可以使刮板32更好的受力。
38.考虑到刮板32使用时间较长后会磨损,因此将刮板32分为刀体322与安装板,安装板转动连接在滑杆31上,刀体322通过插接的方式连接在安装板上,方便刀体322的更换。
39.考虑到刮板32只能清理连接板211上残留的混凝土,而滑动板212上残留的混凝土只能通过滑动板212收入连接板211时,连接板211的外壁将滑动板212内壁上残留的混凝土刮出;但是连接板211远离安装杆22的端面上随着滑动板212的收入会不断的堆积混凝土残渣;因此将连接板211远离安装杆22的端面与内壁之间进行倒角,倒角可以将堆积在此处的残渣引导至连接板211后方,减少混凝土残渣的堆积。
40.为了减少滑动板212与连接板211内壁上残留的混凝土,在连接板211与滑动板212内壁上均涂有脱模剂。
41.本技术实施例一种混凝土混合装置的实施原理为:当混凝土卸料时,启动电机,使滑道2远离车体1的一端获得水平面上的转动,使混凝土被引导至水平面的不同位置,从而方便将混凝土铺平;考虑到搅拌罐11排出混凝土的速度与搅拌罐11中混凝土存量有关,但是精准控制车速较难,因此通过气缸24改变滑道2的坡度从而使混凝土落至地面的速度不变,使混凝土在车体1运行方向上落在地面上的厚度相对均匀;考虑到所需铺设混凝土的宽度可能大于引导板21长度,因此将引导板21设为可伸缩的结构,从而使混凝土能被引导至更大的距离范围,同时为了避免引导板21过长而坡度过大从而与地面干涉,因此将气缸24连接在滑动板212上,使滑动板212始终不会与地面接触;最后为了清理连接板211上混凝土残渣,在连接板211上滑动连接了一个刮板32,同时刮板32的转动功能也让其不会干扰混凝
土卸料,且刮板32上的刀体322采取插接的方式可以方便其进行更换。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。