1.本实用新型涉及健身设备技术领域,尤其涉及能够提供力量训练功能的力量训练器械。
背景技术:
2.近些年来家用健身器材有了大的发展,具有综合功能的智能家用健身器材陆续上市。有以家用智能自行车做有氧锻炼的健身设备,有以家用智能健身镜做有氧锻炼的健身设备等,还有以电机设置阻力的方式替代传统力训健身器材的配重块配重的方式的新型智能家用力量训练器械。
3.这些智能家用健身器械的公众占有数量在逐年上升,然而这些智能家用健身器械给大众带来便利的同时也存在着巨大的电能消耗。
4.另一方面,针对健身自行车那样的健身器材,人们开发出了健身器材自发电式技术来将使用者在健身时所做的功作为电能回收。例如,中国专利102688582b披露了一种自发电健身车,其设有发电机,通过发电机将传动组的机械回转运动转化为电能,发电机产生的电能一方面可以供健身车的电子显示操作面板使用,另一方面可以供健身车外接的电子产品使用。
技术实现要素:
5.要解决的技术问题
6.上述中国专利102688582b所披露的现有技术,虽然能够将使用者在健身时所做的功作为电能回收,但是其并不适合于提供力量训练功能的力量训练器械。具体而言,以用电机设置阻力(电子配重)的方式替代传统力训健身器材的配重块配重的方式的新型智能家用力量训练器械为例,在进行力量训练时,使用者需要在做功和被做功两种状态来回切换,使用者拉动绳索时是对设备做功,设备在发电;使用者被绳索拉回去是设备对使用者做功,设备在耗电。
7.该类型的力量训练器械,因为采用电子配重所以需要由电机来产生训练所需的阻力(这里称之为电子配重阻力),通常始终要消耗电能。虽然利用该器械的电机可以进行自发电,但是由于发电的电能有限且电压不稳定,故会导致难以在发电的同时使电机产生所需的电子配重阻力来维持器械的力量训练功能,尤其是自发电的初期阶段。并且,取决于力量训练的模式,当耗电多于发电时,如果不对训练器械补充电能则难以维持该模式的力量训练。
8.虽然现有技术中采用了蓄电池来存储电能,但是这样的储能方式并不适合在做功和被做功两种状态频繁切换的新型智能家用力量训练器械。首先,蓄电池的放电特性决定了其难以提供瞬时大功率。其次,频繁的充放电切换会导致蓄电池大幅地缩短寿命。并且,大容量的蓄电池会增加设备的重量和成本。
9.本实用新型是为解决上述技术问题而做出的,其目的在于提供一种自发电力量训
练器械,在电子配重式力量训练器械中,能够在实现自发电的同时提供器械的力量训练功能。
10.解决技术问题的手段
11.本实用新型的发明人长期致力于力量训练器械的研究开发,基于此类训练器械本身的特性,开发出了能够在实现自发电的同时尽量维持器械的训练功能的自发电力量训练器械。现简单说明本实用新型的技术思想。
12.电子配重式力量训练器械的训练模式包括有氧训练模式和阻抗训练模式。
13.在有氧训练中,一般是以较大力量和较大速度进行向心运动,以较慢速度和较小力量进行离心运动。在向心运动中使用者对训练器械做功,以较大力量进行向心运动意味着做功较多。因此,在整个有氧运动过程中,体现为训练器械的发电状态,能够将多余的电量存储在蓄电池内。因此,可以将有氧训练模式作为发电模式。
14.在抗阻训练中,一般是向心运动和离心运动都需要较大的力量,当向心力量等于离心力量时,系统只需要消耗损耗能量,不对外做功也不对内做功。当向心力量大于离心力量时,电机发电大于电动机做功,如果多出的电能能够覆盖损耗,则可以进行充电。当离心力量大于向心力量时,电机做功大于发电,则消耗电能。然而,无论是上述哪种情况,由于交替地进行向心运动和离心运动,在整个阻抗训练中有发电过程存在,故整体上的耗电并不多,只要利用存储在蓄电池内的电能来适当地进行补充即可维持训练功能。
15.本实用新型正是基于上述技术思想做出的,其提供一种自发电力量训练器械,包括:为力量训练提供电子配重的永磁电机,与所述永磁电机的驱动轴连结的力量输出输入结构,以及用于驱动所述永磁电机的电机驱动器,其与所述永磁电机连接,所述自发电力量训练器械的特征在于,还包括:电容器,其与所述母线连接,能够对所述电机驱动器提供电功率来驱动所述永磁电机,并能够由所述永磁电机发电产生的电能来对其充电;储能部件,其与所述母线连接,能够对所述电容器和所述电机驱动器提供电功率,并能够由所述永磁电机发电产生的电能来对其充电;电量监测器,其监测所述储能部件的电量;充放电电路,其连接在所述母线与所述储能部件之间,能够对所述储能部件进行充放电;和控制器,其构成为能够根据所述储能部件中的电量来决定能够提供的训练模式,当所述储能部件中的电量小于规定的第一电量时使所述自发电力量训练器械仅能够提供作为发电模式的有氧训练模式,当所述储能部件中的电量大于等于规定的第二电量时,能够提供所述有氧训练模式和其他训练模式直到所述储能部件中的电量小于所述第一电量,其中,所述第二电量大于所述第一电量。
16.优选的是,所述其他训练模式包括阻抗训练模式,在所述阻抗训练模式中使用者能够通过所述力量输出输入结构交替地进行向心运动和离心运动。
17.优选的是,在所述阻抗训练模式中所述离心运动的电子配重阻力设定成小于所述向心运动的电子配重阻力。
18.优选的是,在所述有氧训练模式中,当所述电容器的电压小于第一电压时进行整流发电,当电容器的电压大于等于所述第一电压时利用所述电机驱动器控制所述永磁电机进行可控发电,由此来控制所述永磁电机产生的电子配重阻力,在所述阻抗训练模式中,在所述向心运动中利用所述电机驱动器控制所述永磁电机进行可控发电,在所述离心运动中利用所述电机驱动器来控制所述永磁电机的转矩,由此来控制所述永磁电机产生的电子配
重阻力。
19.优选的是,所述永磁电机为三相永磁同步电机,所述电机驱动器包括mcu控制器和6个开关管组成三相逆变电路,在每个开关管上反向并联连接有二极管,在所述有氧训练模式中,当所述电容器的电压小于第一电压时,所述永磁电机发电产生的电流经由所述二极管整流后进行所述整流发电,当电容器的电压大于等于所述第一电压时,由所述mcu控制器输出的pwm控制信号控制所述6个开关管来进行可控发电,由此来控制所述永磁电机产生的电子配重阻力,在所述阻抗训练模式中,在所述向心运动中由所述mcu控制器输出的pwm控制信号控制所述6个开关管来进行可控发电,在所述离心运动中由所述mcu控制器输出的pwm控制信号控制所述6个开关管来控制所述永磁电机的转矩,由此来控制所述永磁电机产生的电子配重阻力。
20.优选的是,当所述电容器的电压大于等于第二电压时,所述控制器对所述充放电电路进行控制使得对所述储能部件进行充电,当所述储能部件中的电量大于等于所述规定的第一电量、并且所述电容器的电压小于第三电压时,所述控制器对所述充放电电路进行控制使得从所述储能部件对所述电容器进行放电,其中,所述第二电压、所述第三电压之间满足以下的关系:第二电压>第三电压。
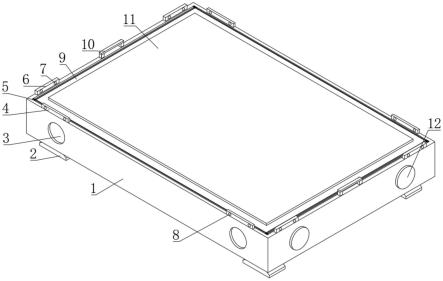
21.优选的是,所述力量输出输入结构包括与所述永磁电机的驱动轴连结的绞盘和与所述绞盘连结的拉绳,使用者通过拉动所述拉绳能够对抗所述永磁电机的阻力使所述永磁电机发电,由所述电机驱动器驱动所述永磁电机以规定的转矩转动时能够使所述绞盘将拉绳拉回,同时对使用者做功。
22.优选的是,还包括刹车电路,其通过开关部件与所述母线连接,在所述母线的电压超过规定的阈值时,启动刹车电路来消耗来自所述母线的电能。
23.优选的是,还包括提示装置,当所述储能部件的电量小于所述规定的第一电量而能够提供的训练模式仅为有氧训练时,提示使用者可以进行规定时间长度的有氧训练,当所述储能部件的电量大于等于所述规定的第二电量,提示使用者可以开始进行其他模式的训练。
24.优选的是,所述储能部件为蓄电池和/或飞轮储能器。
25.有益效果
26.本实用新型的自发电力量训练器械的优点之一是,由于电子配重式力量训练器械在有氧训练过程中体现为训练器械的发电状态,能够作为发电模式工作,通过一段时间的有氧训练能够将多余的电量存储在储能部件内,而在阻抗训练中亦能够在减小耗电的同时维持训练功能,所以能够提供一种自发电力量训练器械,其无需连接到外部电源就能够在实现自发电的同时提供器械的力量训练功能。
27.并且,由于能够自发电而无需连接到外部电源,所以在实现了节能环保的同时,还能够扩大力量训练器械的使用场景,例如在户外或不方便插电使用的时候也能够进行力量训练。
附图说明
28.图1a是表示电子配重式力量训练器械中提供力量训练功能的基本结构的示例的图。
29.图1b是表示电子配重式力量训练器械中提供力量训练功能的基本结构的示例的图。
30.图1c是表示电子配重式力量训练器械中提供力量训练功能的基本结构的示例的图。
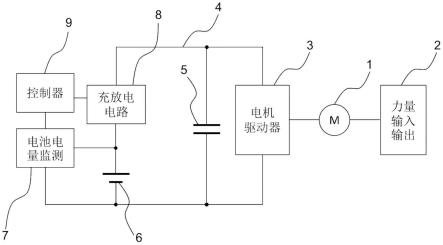
31.图2是表示本实用新型的第一实施方式的自发电力量训练器械的结构的框图。
32.图3是表示本实用新型的一个实施方式的电机驱动器的电路结构的电路图。
33.图4是表示用图3所示的电机驱动器来驱动永磁电机时的控制逻辑的框图。
34.图5是表示本实用新型的一个实施方式的用于充放电控制的结构的框图。
35.图6是表示本实用新型的第二实施方式的自发电力量训练器械的结构的框图。
36.图7是表示本实用新型的第三实施方式的自发电力量训练器械的结构的框图。
具体实施方式
37.下面,参照附图说明本实用新型的具体实施方式。
38.(第一实施方式)
39.(提供力量训练功能的基本结构)
40.电子配重式力量训练器械使用电子配重替代物理配重,通过控制电机以电生磁力提供阻力。使用者对抗电机产生的阻力,将与电机连结的拉绳向外拉出,模拟了传统的拉动物理配重块的拉力器的健身方式。
41.在本实用新型的一个实施方式中,电子配重式力量训练器械中提供力量训练功能的基本结构可以是公开号为113181592a的中国专利申请中所记载的结构。
42.具体而言,图1a至图1c是表示电子配重式力量训练器械中提供力量训练功能的基本结构的示例的图。如图1a所示,第一拉绳31一端固定缠绕于阻力机构20的绞盘22上,另一端先绕过一个第一定滑轮61后绕过第一联动滑轮51,最后绕过另外一个第一定滑轮61,最后固接于第一联动滑轮51的联动支架511上。如图1b所示,第二拉绳32缠绕于第一联动滑轮51、第二联动滑轮52和第二定滑轮62之间,第二拉绳32的两端可连接训练部件。如图1c所示,第三拉绳33一端固接于设备的把手装置上,另一端先绕过两个小的第三定滑轮63再绕过第二联动滑轮52后,再绕过两个大的第三定滑轮63后穿出把手装置与外部的训练部件相连接。拉出第二和第三拉绳时都会拉动第一拉绳,而第一拉绳的一端与电机驱动的绞盘22连接。
43.当电机驱动器驱动电机使得绞盘向拉绳拉动其旋转的反方向转动时,就产生了和电机阻力的力量对抗,当拉力大于阻力时就像拉起了一个物理上的重物一样,这在图1a中表现为以拉力对抗由滑轮联动支架511通过拉绳连接的电机产生的等重量的力,使联动支架511向电机方向移动;当拉力小于阻力时,电机旋转使绞盘将拉绳缠绕回收,重物回落即联动支架511向远离电机方向移动复位。
44.然而,提供力量训练功能的基本结构不限于上述结构,只要是具有能够产生阻力的电机和与所述电机的驱动轴连结的力量输出输入结构,使用者能够通过该力量输出输入结构对所述电机做功使得该电机发电,并能够通过该力量输出输入结构接受电机对使用者的做功,可以采用其他的结构,例如可以采用具有绞盘、拉绳和滑轮的机构,但是拉绳和滑轮的数量及配置不限于图1a至图1c所示的方式。
45.并且,还可以在绞盘上设置回线弹簧和单向轴承,利用该回线弹簧的拉力使绞盘将拉绳缠绕回收,不依赖于电机旋转地进行回线。这使得在力量训练器械中没有足够的电能来驱动电机时(例如有氧训练的初期),能够利用该回线弹簧的拉力来使绞盘将拉绳缠绕回收,供使用者反复进行向心运动。
46.(自发电力量训练器械的结构)
47.图2是表示本实用新型的一个实施方式的自发电力量训练器械的结构的框图。如图2所示,本实用新型的一个实施方式的自发电力量训练器械包括:为力量训练提供电子配重的永磁电机1,与所述永磁电机的驱动轴连结的力量输出输入结构2,用于驱动所述永磁电机1的电机驱动器3,其与所述永磁电机1连接,电容器5,其与所述母线4连接,能够对所述电机驱动器3提供电功率来驱动所述永磁电机1,并能够由所述永磁电机1发电产生的电能来对其充电,蓄电池6,其通过充放电电路8与所述母线4连接,能够对所述电容器5和所述电机驱动器3提供电功率,并能够由所述永磁电机1发电产生的电能来对其充电,电池电量监测器7,其监测蓄电池6的电量,充放电电路8,其连接在母线4与蓄电池6之间,能够在控制器9的控制下,根据所述电容器5的电压和所述蓄电池6的电量来对所述蓄电池进行充放电,控制器9,其构成为能够根据蓄电池6中的电量来决定能够提供的训练模式,当蓄电池6中的电量小于规定的第一电量时使自发电力量训练器械仅能够提供作为发电模式的有氧训练模式,当蓄电池6中的电量大于等于规定的第二电量时,能够提供所述有氧训练模式和其他训练模式直到所述蓄电池中的电量小于所述第一电量,其中,所述第二电量大于所述第一电量。
48.图3是表示本实用新型的一个实施方式的电机驱动器的电路结构的电路图。因为该电机驱动器的主要功能是控制永磁电机的发力,所以又称为发力器控制子系统。
49.如图3所示,该实施方式中的永磁电机为三相永磁同步电机,电机驱动器包括mcu控制器和6个开关管组成三相逆变电路,在每个开关管上反向并联连接有二极管。
50.下面更具体地说明如何利用图3所示的电路结构进行电机的阻力控制(发力控制)。
51.6个开关管101-106组成三相逆变电路,控制逻辑则由mcu控制器112输出的6路pwm控制信号114决定:6路pwm控制信号经过驱动电路115进行功率放大与高压隔离,实现对igbt开关管的控制。101、102作为u相107的逆变开关,103、104作为v相108的逆变开关,105、106作为w相109逆变开关,通过svpwm或spwm等逆变调制算法实现三相永磁同步电机110的控制信号输出。
52.116、117、118分别为三相下开关管的电流采样电阻,根据欧姆定律u=r*i,可以通过采集电流采样电阻的电压值,计算出通过三相下开关管和采样电阻的电流119。101、102不能同时处于打开状态,103、104不能同时处于打开状态,105、106不能同时处于打开状态,否则将导致短路。根据这个原则,已知电流采样电阻通过的电流值,就可以得到107、108、109的输出电流。
53.三相永磁同步电机110提供光电编码器、磁旋转编码器、霍尔传感器等,mcu控制器112通过连接这些传感器,可以得到电机的位置、速度120等反馈信息。
54.mcu控制器112采集逆变器电路的母线电压121,必要时通过控制igbt开关管111与刹车电阻113、电容器122形成放电回路,实现放电功能,从而阻止母线电压过高,损坏元器
件。
55.图4是表示用图3所示的电机驱动器来驱动永磁电机时的控制逻辑的框图。该控制逻辑主要是用于控制永磁电机的发力。
56.下面对图4所示的控制逻辑进行说明。速度与力量设置部(201)用于设置目标速度与最大力量,mcu控制器将设置的速度与力量转换为电机的转速与转矩。由于使用的是永磁同步电机,所以电机转矩控制iq与磁链控制id部(203)中的id为0:即根据位置/速度部(225)的反馈值(210),以及速度与力量设置部(202)的值,mcu控制器计算到一个目标iqref(227)。电机的位置与速度由电机(223)的编码器信号(224)计算得到,并使用采集到的位置信息参与park变换(220)和park反变换(227)的计算。
57.电流读取部(216)读取的三相电流ia、ib、ic(217,222)经过clarke变换(218)得到ialpha反馈和ibeta反馈(219),再参照位置/速度部(225)的位置/速度值(226)进行park变换(220)得到iq反馈(206)和id反馈(207)。
58.电机转矩控制iq(204)等于iqref(227),与iq反馈(206)值由vq pid控制部(208)形成pid闭环控制得到vq(211),同时id(205)等于0,与id反馈(207)值由vd pid控制部(209)形成pid闭环控制得到vd(212)。vq、vd以及电机反馈的位置信息一起参与park反变换(213)得到valpha和vbeta(214)。valpha与vbeta输入svpwm计算部(215)得到6路pwm控制信号输出,从而实现对电机的速度与转矩的控制。
59.电机无论是作为电动机工作(电机转动以其转矩来拉动拉绳)还是作为发电机工作(使用者克服阻力拉动拉绳的过程),都能够通过上述转矩闭环控制调整电机的转矩。
60.(自发电力量训练器械的工作状态)
61.本实用新型的发明人长期致力于力量训练器械的研究开发,基于此类训练器械本身的特性,开发出了能够在实现自发电的同时尽量维持器械的训练功能的自发电力量训练器械。现简单说明本实用新型的技术思想。
62.永磁同步电机可以工作在做功状态和发电状态。电机效率一般较高,可以达到90%以上。
63.电机可以处于做功状态,此时电机轴旋转方向和出力方向相同。当电机轴出力堵转的情况下,虽然没有做功,但也消耗能量,所以暂时放到做功状态下。做功状态下,电机需要消耗储存在电容器内的电能。
64.电机可以处于发电状态,此时电机轴旋转方向和出力方向相反。相当于外力顶着电机出力向电机做功。发电状态下,外力做的功扣除损耗,会以电能的形式被存储在电容器内。
65.电子配重式力量训练器械的训练模式包括有氧训练模式和阻抗训练模式,但不限于这两种模式。例如,还可以包括模拟皮划艇运动的皮划艇模式等。从人对器械做功和器械对人做功的角度出发,以有氧训练模式和阻抗训练模式为代表来说明本实用新型的自发电力量训练器械的工作状态。
66.在有氧训练中,一般是以较大力量和较大速度进行向心运动,以较慢速度和较小力量进行离心运动。在向心运动中使用者对训练器械做功,以较大力量进行向心运动意味着做功较多。因此,在整个有氧运动过程中,体现为训练器械的发电状态,能够将多余的电量存储在蓄电池内。因此,可以将有氧训练模式作为发电模式。
67.在抗阻训练中,一般是向心运动和离心运动都需要较大的力量,当向心力量等于离心力量时,系统只需要消耗损耗能量,不对外做功也不对内做功。当向心力量大于离心力量时,电机发电大于电动机做功,如果多出的电能能够覆盖损耗,则可以进行充电。当离心力量大于向心力量时,电机做功大于发电,则消耗电能。然而,无论是上述哪种情况,由于交替地进行向心运动和离心运动,在整个阻抗训练中有发电过程存在,故整体上的耗电并不多,只要利用存储在蓄电池内的电能来适当地进行补充即可维持训练功能。
68.如果电池电量充裕,可以直接进行抗阻训练。如果电池电量不足,可以让使用者先做一定时长的有氧训练,给电池充电,然后再进行抗阻训练。这也符合一定的健身训练原则。
69.本实用新型是基于上述技术思想做出的,本实用新型的自发电力量训练器械能够根据所述蓄电池中的电量来决定能够提供的训练模式,当所述蓄电池中的电量小于规定的第一电量时能够提供作为发电模式的有氧训练模式,当所述蓄电池中的电量大于等于规定的第二电量时,能够提供所述有氧训练模式和其他训练模式直到所述蓄电池中的电量小于所述第一电量,其中,所述第二电量大于所述第一电量,在所述有氧训练中,使用者通过所述力量输出输入结构进行向心运动,对所述自发电力量训练器械做功使所述永磁电机发电来对所述蓄电池进行充电。
70.在本实用新型的一个实施方式中,由控制器9来根据蓄电池6中的电量决定能够提供的训练模式。控制器9可以采用mcu控制器,优选的是共用上述图3中的电机驱动器的mcu控制器112。此外,考虑到器械使用初始状态可能是没电的状态,作为另一种实施方式,可以采用在蓄电池中的电量不足的状态能够自动选择作为发电模式的有氧运动模式的结构。
71.采用本实用新型的自发电力量训练器械,当蓄电池中的电量小于规定的第一电量时能够提供有氧训练模式,在有氧训练中,使用者通过力量输出输入结构进行向心运动,对自发电力量训练器械做功使永磁电机发电来对所述蓄电池进行充电。经过一段时间的有氧训练后,当蓄电池中的电量大于等于规定的第二电量时,能够提供所述有氧训练模式和其他训练模式直到所述蓄电池中的电量小于所述第一电量。由此,在电子配重方式的力量训练器械中,无需连接到外部电源就能够在实现自发电的同时提供器械的力量训练功能。
72.当力量输出输入结构包括与永磁电机的驱动轴连结的绞盘和与所述绞盘连结的拉绳时,优选的是,在有氧运动模式下,拉绳的回收依靠弹簧产生的弹性力而不使电机作为电动机工作,以减少对发电产生的电能的消耗。
73.第一电量和第二电量的值可以考虑如下的因素来选择。第一电量可以是很小的值,例如蓄电池电量的10%以下。第二电量要考虑三个因素,一是蓄电池本身的容量,二是需要维持多长时间的其他训练模式,这取决于在其他模式中的耗电量大小,三是考虑充电所需的时间。如果在其他模式中的耗电量较小,则可以将第二电量取得较低,这样既能维持该训练模式较差时间,又能缩短充电时间。
74.在本实用新型的自发电力量训练器械中,其他训练模式包括阻抗训练模式,在阻抗训练中使用者通过所述力量输出输入结构交替地进行向心运动和离心运动,在所述向心运动中使用者对所述自发电力量训练器械做功使所述永磁电机发电,在所述离心运动中所述自发电力量训练器械对使用者做功消耗电能。
75.优选的是,在阻抗训练模式中所述离心运动的电子配重阻力设定成小于所述向心
运动的电子配重阻力。具体而言,在用电机阻力(电子配重)的方式替代传统力训健身器材的配重块配重的方式的智能家用力量训练器械中,使用者可以选择或设定训练阻力。当使用者选择或设定了训练阻力时,优选将向心运动的电子配重阻力设定成使用者选择的训练阻力,将离心运动的电子配重阻力设定成小于该选择的训练阻力的阻力。
76.在电子配重方式的力量训练器械中,在离心运动中所述自发电力量训练器械对使用者做功消耗的电能,正比于电子配重阻力。将向心运动的电子配重阻力设定成大于离心运动的电子配重阻力,或者说将离心运动的电子配重阻力设定成小于向心运动的电子配重阻力,能够减小离心运动中消耗的电能,以便于在整个阻抗训练中整体上使发电量与耗电量取得平衡,来减少整个器械的能耗,延长能够提供阻抗训练模式的时间。
77.两个运动的电子配重阻力之差可以考虑以下因素来选择。如果这个差太小的话,加上系统的电力损耗后,整体上耗电较多,就会影响到阻抗训练模式的可维持时间。如果这个差太大了,离心运动的训练效果就会降低。所以要在二者之间取得平衡,选择合适的阻力之差。例如,当系统损耗为20%时,可以将离心运动的阻力设置为向心运动的阻力的80%。这样,就能够在尽量维持离心运动的训练效果的同时做到发电量与耗电量大致平衡,来尽量减少离心运动中的耗电,延长能够提供阻抗训练模式的时间。
78.考虑力量训练初期的工作状态,在开始进行有氧训练时电容器和蓄电池中均没有储存电量。使用者以较大力量进行向心运动,在此过程中永磁电机进行发电,并对电容器进行充电使电容器的电压逐渐增大。当所述电容器的电压小于例如30v的第一电压时进行整流发电,当电容器的电压大于等于所述第一电压时利用所述电机驱动器控制所述永磁电机进行可控发电,由此来控制所述永磁电机产生的电子配重阻力。这样,即使在力量训练初期尚未发电的状态,也能够以一定的阻力进行有氧训练。
79.而在所述阻抗训练模式中,使用者交替地进行向心运动和离心运动。此时,蓄电池中的电量大于等于规定的第二电量,电机驱动器能够正常工作。在所述向心运动中利用所述电机驱动器控制所述永磁电机进行可控发电,在所述离心运动中利用所述电机驱动器来控制所述永磁电机的转矩,由此来控制所述永磁电机产生的电子配重阻力。
80.当采用图3所示的电机驱动器的电路结构时,在有氧训练模式中,使用者以较大力量进行向心运动,在此过程中三相永磁同步电机进行发电,并对电容器进行充电使电容器的电压逐渐增大。当所述电容器的电压小于第一电压(例如30v)时,mcu和6个开关管尚未工作,这时永磁电机发电产生的电流经由所述二极管整流后流入电容器进行整流发电,此时永磁电机产生的阻力取决于该电流的大小。当电容器的电压大于等于所述第一电压时,mcu和6个开关管进入工作状态,由所述mcu控制器输出的pwm控制信号控制所述6个开关管来进行所述可控发电,由此来控制所述永磁电机产生的电子配重阻力,在进行发电的同时提供适当的阻力供训练者进行有氧运动。
81.当采用图3所示的电机驱动器的电路结构时,在阻抗训练模式中,使用者交替地进行向心运动和离心运动。在所述向心运动中由所述mcu控制器输出的pwm控制信号控制所述6个开关管来进行可控发电,在所述离心运动中由所述mcu控制器输出的pwm控制信号控制所述6个开关管来控制所述永磁电机的转矩,由此来控制所述永磁电机产生的电子配重阻力。
82.(充放电电路的操作)
83.图5是表示本实用新型的一个实施方式的用于充放电控制的结构的框图。如图5所示,蓄电池6可以采用锂离子电池,通过电流检测电阻71和电池电量监测器7能够实时监测蓄电池6的电量。mcu控制器10根据蓄电池6的电量和未图示的电容器电压检测器检测到的电容器5的电压,能够控制充放电电路8进行蓄电池的充放电。优选的是,mcu控制器10共用上述图3中的mcu控制器112。
84.本实用新型的自发电力量训练器械的充放电电路8,可以采用现有的双向直流变换器,其主要包括两个开关管、两个二极管以及未图示的电感器和电容器。在mcu控制器10的控制下充放电电路8能够进行如下的操作:当所述电容器5的电压大于等于第二电压时,对充放电电路8进行控制使得对所述蓄电池6进行充电,当蓄电池6中的电量大于等于所述规定的第一电量、并且所述电容器5的电压小于第三电压时,对充放电电路8进行控制使得从蓄电池6对电容器5进行放电,其中,所述第一电压、所述第二电压、所述第三电压之间满足以下的关系:第二电压>第三电压>第一电压。
85.作为一个具体例子,假设电机工作额定电压是48v,在发电状态下,可以把电容器充电到60v。那么可以选用52v的电池,充放电电路可以在电容器电压超过52v(第二电压)时,开始往蓄电池充电。当电压超过60v,采用刹车电阻(图3中的刹车电阻113)消耗电容器的多余电量。当做功时,在电容电压小于48v(第三电压)时,可以让蓄电池通过充放电电路往电容器内充电,让电容器电压维持在48v-52v之间。
86.通过使第二电压和第三电压之间满足上述的关系,在充放电过程中,上述电容器的电压能够被维持在第三电压和第二电压之间,而不进行蓄电池的充放电。只有在电容器的电压下降至第三电压以下时才经由充放电电路由蓄电池对其充电。这样,相比于不具有电容器的自发电装置,就能够减少蓄电池的充放电频率,延长蓄电池的寿命。
87.第二电压和第三电压的值可以考虑如下的因素来选择。第二电压和第三电压之差越大,则蓄电池的使用率越低,从越有利于延长蓄电池的寿命。但是,由于该差值越大蓄电池的使用率越低,所以会导致充电时间变长。需要考虑蓄电池寿命和充电时间的平衡来适当选择第二电压和第三电压的值。
88.电容器的电容量可以考虑如下的因素来选择。电容器的容量越大,则其能够提供的电量越多,越有利于将其电压维持在第三电压和第二电压之间。这样,无论是对训练器械的工作还是对延长蓄电池寿命都是有利的。但是,电容器的容量越大成本越高,且会导致蓄电池的使用率降低,充电时间变长。所以需要综合考虑上述因素来选择电容器的容量,优选电容器的容量在1mf至10mf之间。
89.关于蓄电池的容量,考虑到即使是抗阻训练,当向心力量等于离心力量时,系统只需要消耗损耗能量,蓄电池的电量仅仅是进行适当的能量补充,所以能够选择容量较小的蓄电池。这样既能减小力量训练器械的重量体积,降低蓄电池的成本,又能缩短充电所需的时间。
90.(训练模式的提示)
91.为了向使用者提示自发电力量训练器械当前可以进行的力量训练模式,本实用新型的自发电力量训练器械可以具有提示装置,当所述蓄电池的电量小于所述规定的第一电量而能够提供的训练模式仅为有氧训练时,提示使用者可以进行规定时间长度的有氧训练,当所述蓄电池的电量大于等于所述规定的第二电量,提示使用者可以开始进行其他模
式的训练。
92.作为提示装置的具体结构,考虑到即使在自发电力量训练器械完全无电的状态下也能够进行提示,优选耗电少的结构。例如,可以采用电子墨水方式的显示器,其在没有供电的状态下也能够进行显示。此外,可以是“太阳能电池 语音”的方式,也可以是“太阳能电池 小屏”的方式,也可以是“太阳能电池 小屏 语音”的方式。此外,也可以是像电脑主板那样具有一个纽扣电池,即使系统完全没电,也能够进行电池电量监测、决定训练模式的处理和训练模式提示。
93.(第二实施方式)
94.图6是表示本实用新型的第二实施方式的自发电力量训练器械的结构的框图。
95.如图6所示,本实用新型的第二实施方式的自发电力量训练器械包括:为力量训练提供电子配重的永磁电机1,力量输出输入结构2,用于驱动所述永磁电机1的电机驱动器3,电容器5,飞轮储能器6’,其通过充放电电路8与所述母线4连接,能够对所述电容器5和所述电机驱动器3提供电功率,并能够由所述永磁电机1发电产生的电能来对其充电,储能器电量监测器7’,其监测飞轮储能器6’的储能量(为了便于说明将飞轮储能器6’的储能量也称为电量),充放电电路8,其连接在母线4与飞轮储能器6’之间,能够在控制器9的控制下,根据所述电容器5的电压和飞轮储能器6’的储能量来对飞轮储能器6’进行充放电,以及控制器9。
96.本实施方式与第一实施方式的区别仅在于,用飞轮储能器6’代替了第一实施方式中的蓄电池6,储能器电量监测器7’监测的是飞轮储能器6’储存的能量,其他部件及其操作与第一实施方式相同。下面仅就与第一实施方式的不同之处进行说明。
97.飞轮储能器6’包括三个部分:一个飞轮,电动机兼发电机和电力转换器。当电力转换器从外部输入电能时驱动电动机旋转,电动机带动飞轮旋转,飞轮储存动能(机械能)。当外部负载需要能量时,用飞轮带动发电机旋转,将动能转化为电能,再通过电力转换器变成负载所需要的频率、电压等级的电能。在本实用新型中,飞轮的质量选择1~20kg,优选1~10kg,飞轮的转速可达4000~10000r/min。为了减少充放电过程中的能量损耗(主要是摩擦力损耗),优选电机和飞轮都使用磁轴承,使其悬浮,以减少机械摩擦;优选将飞轮和电机放置在真空容器中,以减少空气摩擦。这样飞轮储能器的净效率(输入输出)达95%左右。电力转换器采用mosfet和igbt组成的双向逆变器。
98.在第一实施方式采用蓄电池作为储能部件。由于蓄电池采用化学方式储存电能,故其充放电速度较慢,有时难以满足实际需求。并且,频繁的充放电会加速蓄电池的老化。
99.而飞轮储能器6’用动能来储存能量,具有充放电速度较快且不易老化的优点。采用飞轮储能器6’代替蓄电池作为储能部件,能够提高系统的充放电速度,从而提升自发电力量训练器械的性能。
100.(第三实施方式)
101.图7是表示本实用新型的第三实施方式的自发电力量训练器械的结构的框图。
102.第三实施方式与第一实施方式、第二实施方式的区别在于,作为储能部件同时具有蓄电池6和飞轮储能器6’,储能器电量监测器7’监测的是蓄电池6的电量和飞轮储能器6’储存的能量,充放电电路8控制的是蓄电池6和飞轮储能器6’两者的充放电,其他部件及其操作与第一实施方式相同。下面仅就与第一实施方式、第二实施方式的不同之处进行说明。
103.充放电电路8对蓄电池6和飞轮储能器6’的充放电控制采用如下的策略:系统发电时先对飞轮储能器6’充电,当飞轮储能器的储能(电量)达到第三规定值以上时再对蓄电池进行充电。系统放电时,先从飞轮储能器6’进行放电,当飞轮储能器的储能(电量)下降到第四规定值以下时,再从蓄电池6进行放电。其中,第三规定值大于第四规定值。
104.采用本实用新型的第三实施方式,能带来在提升了充放电速度的同时进一步增加了能量存储量之效果。从而,能够进一步提升自发电力量训练器械的性能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。