1.本发明属于号牌识别跟踪领域,特别涉及一种铁钢包罐号识别跟踪系统及方法。
背景技术:
2.铁钢包是炼铁、炼钢厂内转载和运输钢水、铁水的容器,实现铁钢包罐号智能识别跟踪是对铁钢包进行智能管理的关键,也是在钢铁行业内实现智能制造的一部分,推动了智能制造技术逐渐应用到传统的生产环节中。在天车吊装作业区域识别被吊装的铁钢包的罐号,可以在系统中实时跟踪哪个号的铁钢包在哪个吊装点位正在进行吊装作业,有助于辅助现场铁钢包调度人员掌握铁钢包运转情况,并且识别出的罐号会与系统预置的调度作业的罐号进行自动匹配确认,避免铁钢包调度混乱情况,通过人工智能识别出的罐号与预置号进行自动确认匹配代替传统的人工确认,可以有效地提高生产效率,因此实现铁钢包罐号高效、准确地识别跟踪是关键任务。
3.现有技术中,铁钢包罐号识别跟踪系统是对射频标签通过耐高温处理后加以应用,运用隔热材料提高标签的耐热程度,但这种方法仅能有限提升标签的耐温能力,隔热材料的寿命确定了射频标签的寿命,相对来说射频的寿命还是太短,容易损坏,更换新的标签的成本大;除此之外,射频标签的数据容量很低,所能存储的信息量十分有限,这就导致该方法的数据传输性能受到很大的限制;另一方面,耐高温设备本身价格昂贵,再加上损坏的成本,采用这种方案缺乏经济上的可行性。因此,建立一种良好的铁钢包罐号识别系统仍是难点。
技术实现要素:
4.针对上述问题,本发明提供如下方案:
5.一方面,本发明提供了一种铁钢包罐号识别跟踪系统,包括:
6.天车定位称重模块、图像采集模块和图像识别模块;
7.其中,天车定位称重模块,用于获取铁钢包的位置信息;
8.图像采集模块,用于基于位置信息与预置点位信息,采集铁钢包图像;其中,预设点位信息为根据需求所设置的点位;
9.图像识别模块,用于基于采集到的铁钢包图像,得到铁钢包罐号识别结果。
10.进一步的,所述铁钢包罐号识别跟踪系统还包括:罐号号牌模块、信息处理展示模块;
11.其中,罐号号牌模块,用于在铁钢包罐壁表面安装铁钢包罐号的号牌;
12.天车定位称重模块,还用于获取铁钢包的重量信息;
13.信息处理展示模块,用于基于铁钢包罐号、位置信息和重量信息,实时展示各点位上铁钢包的作业信息。
14.进一步的,所述天车定位称重模块包括定位子模块和称重子模块,其中,定位子模块用于实时获取铁钢包的位置信息;
15.称重子模块用于实时获取铁钢包的重量信息。
16.进一步的,所述图像采集模块具体用于:
17.根据位置信息与预置点位信息,确定吊装作业的点位,并触发该点位采集图像信号;
18.基于图像采集信号,采集该点位上铁钢包图像。
19.进一步的,所述图像识别模块具体用于:
20.根据采集到的铁钢包图像,设置感兴趣区域;
21.基于感兴趣区域,检测铁钢包罐体与号牌图像,得到铁钢包罐号识别结果。
22.进一步的,所述感兴趣区域是需识别的铁钢包一定会出现的区域。
23.进一步的,所述号牌图像包括:定位号牌图像、纠正号牌图像和识别号牌图像。
24.更进一步的,所述信息处理展示模块具体用于:
25.对接收到的铁钢包罐号、位置信息和重量信息,进行处理;
26.基于处理结果,在可视化系统界面上实时展示各个点位上铁钢包的作业信息。
27.另外一方面,本发明还提供一种铁钢包罐号识别跟踪方法,包括:
28.获取铁钢包的位置信息;
29.基于位置信息与预置点位信息,采集铁钢包图像;
30.基于采集到的铁钢包图像,得到铁钢包罐号识别结果。
31.进一步的,所述铁钢包罐号识别跟踪方法还包括:
32.在铁钢包罐壁表面安装铁钢包罐号的号牌;
33.获取铁钢包的的重量信息,基于铁钢包罐号、位置信息和重量信息,实时展示各点位上铁钢包的作业信息。
34.进一步的,所述基于位置信息,采集铁钢包图像包括:
35.根据位置信息与预置点位信息,确定吊装作业的点位,并触发该点位采集图像信号;
36.基于图像采集信号,采集点位上铁钢包图像。
37.进一步的,所述基于采集到的铁钢包图像,得到铁钢包罐号识别结果包括:
38.根据采集到的铁钢包图像,设置感兴趣区域;
39.基于感兴趣区域,检测铁钢包罐体与号牌图像,得到铁钢包罐号识别结果。
40.更进一步的,所述基于铁钢包罐号、位置和重量信息,实时展示各点位上铁钢包的作业信息包括:
41.对接收到的铁钢包罐号、位置信息和重量信息,进行处理;
42.基于处理结果,在可视化系统界面上实时展示各个点位上铁钢包的作业信息。
43.本发明的有益效果:本发明图像识别工作可以24小时不断开展,保证了在夜晚及厂区光线昏暗区域也可以拍清楚号牌,本发明基于深度学习的图像识别算法,收集到的训练样本丰富,经有效的数据增强处理后,训练得到的模型识别准确率高,具有强的鲁棒性和泛化性,实时的识别结果与实际情况吻合,保障了系统运行的有效性,给现场作业人员提供准确的信息参考,同时综合应用了天车位置、重量信息。
44.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利
要求书以及附图中所指出的结构来实现和获得。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
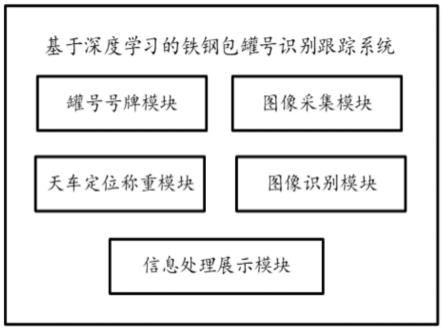
46.图1示出了根据本发明实施例的铁钢包罐号识别跟踪系统框图;
47.图2示出了根据本发明实施例的铁钢包罐号识别跟踪方法流程图;
48.图3示出了根据本发明实施例的铁钢包罐号识别跟踪系统罐号识别流程图。
具体实施方式
49.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.如图1所示,铁钢包罐号识别跟踪系统包括:罐号号牌模块、天车定位称重模块、图像采集模块、图像识别模块、信息处理展示模块。其中,罐号号牌模块具体用于,在铁钢包罐壁表面上安装罐号的号牌,并基于罐号号牌,识别铁钢包罐号;天车定位称重模块具体用于,根据天车上的定位系统和称重系统,实时获取铁钢包的位置信息和重量信息,;图像采集模块具体用于,根据位置信息与预置点位信息,确定吊装作业的点位,并触发该点位采集图像信号,基于图像采集信号,采集该点位上铁钢包图像;图像识别模块具体用于,根据采集到的铁钢包图像,设置感兴趣区域,基于感兴趣区域,检测铁钢包罐体与号牌图像,得到铁钢包罐号识别结果;信息处理展示模块具体用于,对接收到的铁钢包罐号、位置和重量信息,进行处理,然后基于处理结果,在可视化系统界面上实时展示各个点位上铁钢包的作业信息。
51.需要说明的是,罐号的号牌设计成镂空形式,字符与字符之间有一定间隙,用涂料将字符涂上色,并且用底板支架将号牌固定在罐壁表面,以用于铁钢包罐号识别;感兴趣区域是需识别的铁钢包一定会出现的区域,设定感兴趣区域后可以排除图像中其他区域出现铁钢包而带来的干扰;号牌图像包括:定位号牌图像、纠正号牌图像和识别号牌图像。
52.如图2所示,铁钢包罐号识别跟踪方法包括:获取铁钢包的位置信息;基于位置信息与预置点位信息,采集铁钢包图像;基于采集到的铁钢包图像,得到铁钢包罐号识别结果。具体实施步骤为:根据天车上定位称重模块得到天车位置信息和铁钢包重量信息;根据天车位置信息和预置点位信息触发图像识别;根据图像识别的信息,确定铁钢包罐号信息;根据铁钢包重量信息和铁钢包罐号信息进行信息处理展示。需要说明的是,预置点位信息是人工根据需求设置的点位。
53.其中,触发图像识别包括,根据进行吊装作业的天车位置信息与预置点位信息分析判断哪个点位存在吊装作业情况,并触发该点位对应的图像采集模块开始采集图像。
54.其中,图像识别具体包括:对采集到的图像设置一个感兴趣区域,该区域是需识别
的铁钢包一定会出现的区域,设定该区域后就可以排除图像中其他区域出现铁钢包而带来干扰;在感兴趣区域内检测铁钢包罐体,确保铁钢包罐体完全出现在感兴趣区域内,从而保证罐体上的罐号被完整识别,可以排除罐号的号牌在画面中还没出现完整时的识别结果的干扰;采用基于深度学习的号牌定位算法,收集现场的训练数据训练号牌定位模型,对铁钢包罐体上的号牌进行定位,并且获得四边形号牌图像,对获得的四边形号牌图像进行透视变换处理,可以纠正字体倾斜情况,得到纠正后的矩形号牌图像;采用基于深度学习的号牌识别算法,收集现场的训练数据训练号牌识别模型,对纠正后的号牌图像进行识别,得到罐号识别结果。
55.其中,信息处理展示具体包括:将最终识别出的罐号信息发送给信息处理展示模块,系统结合接收到的铁钢包重量信息,实时展示各点位上正在进行吊装作业的铁钢包的罐号和该铁钢包的重量状态。
56.需要说明的是,完成罐体检测具体步骤为:针对所有铁钢包吊装点位采集一天中不同时间段的图像样本,并且在项目过程中不断新增图像样本,得到原始数据集;对原始数据集进行人工标注,只有完整出现的铁钢包为正样本,其他的为负样本;对标注完成的数据集进行旋转、光学变换、增加噪声等数据增强处理,并将数据集按比例分成训练数据集和测试数据集;利用训练数据集基于yolox-s目标检测算法训练铁钢包检测模型,并对训练得到模型进行测试,将测试效果最优的模型作为最终使用模型;将训练得到的模型应用于铁钢包的罐体检测。
57.需要说明的是,基于深度学习的号牌定位具体步骤为:根据得到原始数据集,按罐体裁剪生成新的数据集,作为号牌定位数据集;对号牌定位数据集进行人工标注,标注时用四边形框出号牌;对标注完成的数据集进行正负15度旋转、光学变换、增加噪声等数据增强处理,并将数据集按比例分成训练数据集和测试数据集;利用训练数据集基于dbnet字符定位算法训练号牌定位模型,并对训练得到模型进行测试,将测试效果最优的模型作为最终使用模型;将训练得到的模型应用于号牌定位,获得四边形号牌图像;对获得的四边形号牌图像进行透视变换,得到纠正后的方正的号牌图像。
58.需要说明的是,基于深度学习的号牌识别具体步骤为:基于得到的号牌定位数据集,将其直接作为号牌识别数据集;对号牌识别数据集进行人工标注,标注出号牌的每一位字符;对标注完成的数据集进行光学变换、增加噪声等数据增强处理,并将数据集按比例分成训练数据集和测试数据集;利用训练数据集基于循环神经网络训练号牌识别模型,并对训练得到模型进行测试,将测试效果最优的模型作为最终使用模型;对得到的号牌图像进行识别,得到最终的罐号识别结果。
59.需要说明的是,采用前沿的基于深度学习的图像识别算法,收集到的训练样本丰富,经有效的数据增强处理后,训练得到的模型识别准确率高,具有强的鲁棒性和泛化性,实时的识别结果与实际情况吻合,保障了系统运行的有效性,给现场作业人员提供准确的信息参考。
60.如图3所示,罐号识别包括:获取采集模块采集到的原图,根据原图设置感兴趣区域,在设置的感兴趣区域检测铁钢包罐体,然后基于深度学习的号牌定位系统定位号牌图形,并纠正号牌图像,最后基于深度学习的号牌识别系统识别号牌图像,得到识别结果。
61.需要说明的是,图像采集选用可抑制抖动的相机,因为厂区内是钢铁架构,一旦天
车吊装重物移动时整体架构会产生抖动,从而使安装的相机随之抖动,为了防止抖动的影响,因此选用可抑制抖动的相机,同时在安装相机的位置安装补光装置,有效地保证了在夜晚及厂区光线昏暗区域也可以拍清楚号牌,从而保证图像识别工作可以24小时不间断开展,保证系统24小时有效运转。将天车的位置信息与预置点位信息进行匹配,当天车到达预置点位时发出识别出发信号,识别程序是在触发条件下才开始识别,这样节约了识别程序的资源,同时可以排除从该点位经过但并非真正吊装作业的铁钢包的干扰。
62.需要说明的是,本技术中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。
63.尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
