1.本发明涉及形状测量设备的控制方法,并且具体地涉及探测器单元校正方法,该探测器单元校正方法用于校正探测器单元的线性膨胀以使得即使测量环境温度波动也获得准确的测量值。
背景技术:
2.具有探测器的形状测量设备广泛用于检测待测量对象(工件)的表面。近年来,随着工件的形状变得复杂,形状测量设备通过更换多个探测器(触针(stylus))或者利用旋转驱动轴改变探测器的姿势来测量复杂工件的表面。
技术实现要素:
3.使用多个探测器(触针)或通过探测器自身的旋转驱动轴改变探测器的姿势使得能够高效地测量复杂的工件,但是这需要并增加了用以根据需要来校准多个类型的探测器(触针)和探测器的各种变化形式的探测器的时间和努力。
4.如果探测器(触针)类型的数量增加,或者如果使用以各种方式改变自身姿势的探测器,则对所有探测器或所有变化形式的探测器的频繁校准导致了低效的测量。另一方面,如果测量环境波动,除非根据需要进行校准工作,否则就会发生不能忽略的测量误差。
5.考虑到上述情况,本发明的目的是提供形状测量设备的控制方法,并且具体地涉及探测器单元校正方法,该探测器单元校正方法用于校正探测器单元的线性膨胀以使得即使测量环境温度波动也获得准确的测量值。
6.根据本发明的示例性实施例的探测器单元的校正方法是一种探测器单元的校正方法,所述探测器单元用于利用前端的测量尖端来检测待测量对象的表面,
7.所述探测器单元包括:
8.第一尖端,其是被设置为初始标准规格的标准形式的测量尖端;以及
9.第二尖端,其是从所述标准形式改变的变化形式的测量尖端,
10.其中,所述第一尖端和所述第二尖端是能够更换的,
11.当校准所述探测器单元时,校准所述第一尖端和所述第二尖端,以获取所述第一尖端的坐标值作为基准尖端坐标值,并且获取从所述第一尖端到所述第二尖端的偏离值作为探测器偏离值,以及
12.将所述探测器偏离值与所述基准尖端坐标值相加以获取使用所述第二尖端时的测量值,
13.所述探测器单元的所述校正方法包括:
14.温度数据获取步骤,用于获取校准时的温度与当前测量环境的温度之间的温度差;
15.基准尖端坐标校正步骤,用于计算加上了线性膨胀的所述基准尖端坐标值的校正值,作为基准尖端校正坐标值;
16.探测器偏离校正步骤,用于计算加上了线性膨胀的所述探测器偏离值的校正值,作为探测器偏离校正值;以及
17.测量值计算步骤,用于通过将所述探测器偏离校正值与所述基准尖端校正坐标值相加,来获得所述当前测量环境中使用所述第二尖端时的校正测量值。
附图说明
18.图1是示出形状测量系统的整体配置的图;
19.图2是坐标系之间的关系的示例;
20.图3是探测器单元的外观图;
21.图4是探测器单元的截面图;
22.图5是运动控制器和主计算机的功能框图;
23.图6是示出存储在校正表存储单元中的数据的示例的图;
24.图7是示出探测器单元的变化形式的图;
25.图8是示出用弯曲触针替换基准触针的图;
26.图9是示出辅助坐标系的图;
27.图10是示出腿轴的取向与角度参数之间的关系的示例的图;
28.图11是示出探测器偏离的示例的图;
29.图12是示出温度校正步骤的工艺的流程图;
30.图13是示出测量尖端(第二尖端)随着环境温度的增加的移位的示例的图;以及
31.图14是示出探测器偏离随着环境温度的增加而改变的示例的图。
32.附图标记说明
33.100 形状测量系统
34.200 坐标测量机
35.210 平板(surface plate)
36.211 主量规(master gauge)
37.220 移动机构
38.221 y滑块
39.222 x滑块
40.223 z轴柱
41.224 z心轴
42.300 运动控制器
43.310 测量命令获取单元
44.330 计数器
45.340 驱动命令生成单元
46.350 驱动控制单元
47.500 探测器单元
48.501 探测器头部主体
49.502 探测器固定部
50.510 第一旋转机构
51.511 第一壳体
52.512 第一马达
53.513 第一轴
54.520 第二旋转机构
55.521 第二壳体
56.522 第二马达
57.523 第二轴
58.524 u形联接框架
59.530 基准触针
60.530a 测量尖端(第一尖端)
61.550 弯曲触针
62.550a 测量尖端(第二尖端)
63.551 弯曲点
64.552 机身轴
65.553 腿轴
66.600 主计算机
67.611 cpu
68.620 存储器单元
69.621 校正表存储单元
70.630 形状分析单元
71.640 温度校正单元
具体实施方式
72.将参照附图中分配给元件的附图标记来例示和描述本发明的实施例。
73.(第一示例性实施例)
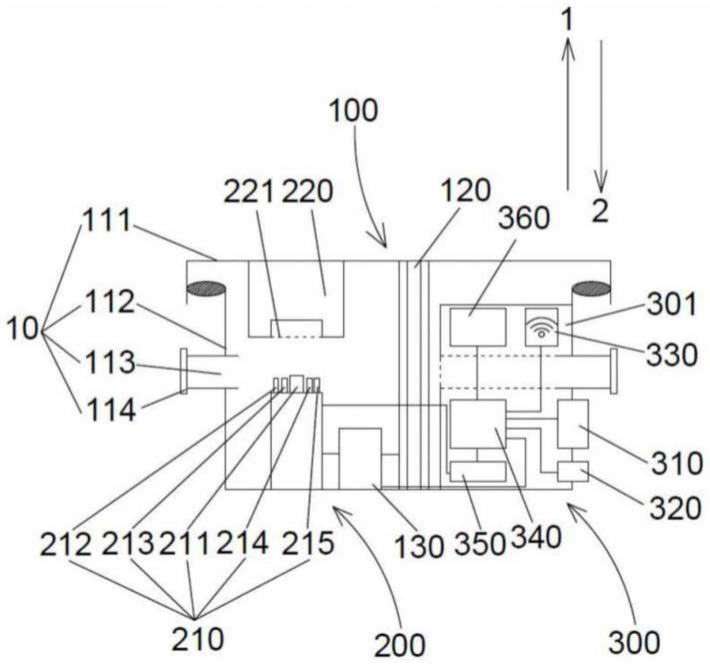
74.图1示出形状测量系统100的整体配置。
75.形状测量系统100的自身配置是已知的,但将简要描述。
76.形状测量系统100包括坐标测量机200、控制坐标测量机200的驱动的运动控制器300、以及控制运动控制器300并进行必要的数据处理的主计算机600。
77.坐标测量机200包括平板210、移动机构220和探测器单元500。
78.移动机构220包括门式y滑块221、x滑块222、z轴柱223和z心轴224。y滑块221在y方向上可滑动地设置在平板210上。x滑块222在x方向上沿着y滑块221的梁滑动。z轴柱223固定到x滑块222。z心轴224在z轴柱223内沿z方向上下移动。
79.y滑块221、x滑块222和z心轴224各自配备有驱动马达(未示出)和编码器(未示出)。
80.各个驱动马达由来自运动控制器300的驱动控制信号驱动和控制。
81.各个编码器检测y滑块221、x滑块222或z心轴224相应的移动量,并将检测值输出到运动控制器300。
82.针对坐标测量机200设置标度坐标系(xs,ys,zs)。
83.图2是示出坐标系之间的关系的图。
84.标度坐标系包括彼此正交的xs轴、ys轴和zs轴。
85.zs轴是向上的垂直方向。
86.标度坐标系的原点os由沿xs轴设置的编码器的标度的原点、沿ys轴设置的编码器的标度的原点和沿zs轴设置的编码器的标度的原点来确定。
87.此外,主量规211(主球)安装在平板210上的预定位置处。
88.主量规211用于进行校准并设置机器坐标系(xm,ym,zm)。主量规211是钢球或陶瓷球等。主量规211的直径(半径)是已知的。也就是说,通过利用探测器测量主量规211的表面上的一些点的坐标,可以唯一地确定主量规211的中心位置。此时,同时校准测量尖端的半径和触针的长度(形状)。
89.主量规211支撑在从平板210的顶面起在z轴方向上具有已知高度的支柱部的前端处。平移标度坐标系(xs,ys,zs),以便使主量规211的中心位置位于原点om,从而获得机器坐标系(xm,ym,zm)。
90.也要使用的其他坐标系是探测器坐标系和工件坐标系(xw,yw,zw),其中,探测器坐标系是内置在探测器单元500中的探测器传感器的坐标系,在工件坐标系(xw,yw,zw)中,工件表面上的预定点(例如,顶点)是原点并且工件的预定表面是xwyw平面。然而,这些与本发明不直接相关,并且被省略。
91.探测器单元500附接到z心轴224的下端。
92.图3示出探测器单元500的外观图。
93.图4示出探测器单元500的截面图。
94.探测器单元500包括探测器头部主体501和在其前端处具有测量尖端(530a)的触针(530)。
95.探测器头部主体501包括探测器固定部502、第一旋转机构510和第二旋转机构520。
96.探测器固定部502附接到z心轴224的下端。
97.第一旋转机构510设置在探测器固定部502的下端。
98.第一旋转机构510包括第一壳体511、第一马达512和第一轴513。
99.第一壳体511附接到探测器固定部502的下端。第一马达512安装在第一壳体511内,并且第一轴513附接到第一马达512的电枢。
100.这里,第一轴513的旋转轴被称为第一旋转轴a1。
101.在本示例性实施例中,第一旋转轴a1的轴向方向平行于z轴方向。
102.第二旋转机构520包括第二壳体521、第二马达522、第二轴523和u形联接框架524。
103.第二壳体521联接到第一轴513。第二马达522安装在第二壳体521内,并且第二轴523附接到第二马达522的电枢。
104.这里,第二轴523的旋转轴被称为第二旋转轴a2。
105.第一旋转轴a1和第二旋转轴a2(的延长线)彼此正交。u形联接框架524附接到第二轴523,并且u形联接框架524围绕第二旋转轴a2旋转。
106.触针(530)附接到u形联接框架524的下端。
107.在图3和图4中附接到探测器单元500的触针530是直线触针530。
108.该直线触针530被称为标准规格中所使用的基准触针530。基准触针530的轴a3(的延长线)与第二旋转轴a2正交。
109.(探测器单元500的标准形式)
110.探测器单元500的初始标准规格假设了:基准触针530附接到探测器单元500,并且基准触针530的轴a3平行于第一旋转轴a1(或者基准触针530的轴a3与第一旋转轴a1对准)。这是探测器单元500的标准形式。
111.换句话说,在标准形式中,第二旋转轴a2的旋转为零,并且基准触针530的轴a3和第一旋转轴a1平行于机器坐标系的z轴。
112.基准触针530在其下端处具有测量尖端530a。
113.测量尖端是球形的并且使得与待测量对象接触。这里,标准形式的测量尖端530a被称为第一尖端530a。
114.第一旋转轴a1(的延长线)、第二旋转轴a2和触针530的轴a3(的延长线)在单个交点处相交。
115.为了以下说明的目的,该交点被称为旋转中心q。
116.第一旋转轴a1的旋转角度由α1表示,其中-180
°
≤α1≤180
°
。(只要建立了电连接,就不需要限制运动的范围,并且旋转运动自身可以是任意数量的旋转。)在图3或图4中,假设前侧是0
°
,并且当从上方观看时,逆时针方向是正方向的旋转,并且顺时针方向是负方向的旋转。
117.第二旋转轴a2的旋转角度由α2表示,其中0
°
≤α2≤90
°
。假设当触针530面向垂直向下时,该角度为0
°
。
[0118]0°
的基准点是任意的。
[0119]
第一马达512和第二马达522例如是步进马达,并且与所施加的驱动脉冲同步驱动。第一旋转机构510和第二旋转机构520各自的运动量(旋转角度)与驱动脉冲的数量成比例。
[0120]
探测器单元500以使触针530可在作为探测器坐标系的坐标轴的xp、yp和zp轴的轴向方向上在一定范围内移动的方式支撑触针530,以便检测测量尖端(530a)与工件表面之间的接触。探测器单元500还包括用于检测触针530的位移的探测器传感器(未示出)。探测器传感器将检测值输出到运动控制器300。
[0121]
(探测器单元的变化形式)
[0122]
探测器单元500可以根据待测量对象以从标准形式改变的变化形式来使用。
[0123]
在探测器单元500的变化形式中,例如,触针保持为基准触针530,并且根据需要通过旋转驱动第一旋转机构510(a1)和第二旋转机构520(a2)来升高或旋转摆动。由于此时测量尖端的位置从标准形式的测量尖端(第一尖端530a)的位置移位,因此从标准形式改变的变化形式的测量尖端被称为第二尖端550a。
[0124]
另外,当触针从基准触针530替换为异形触针时,“第二尖端550a”也适用。
[0125]
异形触针可以是例如弯曲的l形或十字形触针、或者比基准触针530更长或更短的直线触针。
[0126]
注意,单个触针(多触针)可以具有基准尖端(第一尖端530a)和第二尖端550a这两者。
[0127]
(运动控制器300的配置)
[0128]
图5示出运动控制器300和主计算机600的功能框图。
[0129]
运动控制器300包括测量命令获取单元310、计数器单元330、驱动命令生成单元340和驱动控制单元350。
[0130]
测量命令获取单元310从主计算机600获取测量命令数据。
[0131]
计数器单元330对从编码器输出的检测信号进行计数以测量各个滑块的位移量,并且对从探测器传感器输出的检测信号进行计数以测量探测器单元500(触针)的位移量。根据测量到的滑块221、222和224以及探测器单元500的位移量,获得与探测器单元500或测量尖端(550a)有关的位置信息。
[0132]
另外,根据由计数器单元330测量到的触针(550)的位移(探测器传感器的检测值(px,py,pz)),获得测量尖端(550a)的压入量(或压入方向)。
[0133]
驱动命令生成单元340基于来自主计算机600的测量命令数据来生成要提供给移动机构220的驱动命令。在例如jp 5274782 b、jp 6030339 b和jp6063161b等中公开了用于驱动和控制移动机构220的速度矢量命令。
[0134]
(主计算机的配置)
[0135]
主计算机600包括中央处理单元(cpu)611和存储器等,并且通过运动控制器300控制坐标测量机200。cpu 611执行控制程序以进行本示例性实施例中的操作(探测器的温度校正)。主计算机600根据需要与诸如显示器和打印机等的输出装置以及诸如键盘和鼠标等的输入装置连接。
[0136]
主计算机600还包括存储单元620、形状分析单元630和温度校正单元640。
[0137]
存储单元620存储与待测量对象(工件)w的形状相关的设计数据(cad数据和nurbs数据等)、在测量中获得的测量数据以及用于控制整个操作的控制程序。
[0138]
在本示例性实施例中,存储单元620包括存储有探测器单元500的校准数据(校正表)的校正表存储单元621。
[0139]
在图6中示出存储在校正表存储单元621中的数据。稍后描述存储在校正表存储单元621中的校准数据(校正表)。
[0140]
形状分析单元630基于从运动控制器300输出的测量数据(采样数据)来计算与待测量对象有关的表面形状数据,并且分析形状以获得所计算出的与待测量对象有关的表面形状数据的误差和失真等。形状分析单元630还通过将包含扫描路径信息的设计数据(cad数据和nurbs数据等)转换为pcc曲线等来生成测量命令数据。
[0141]
形状分析单元630基于当利用标准形式和变化形式的测量尖端测量主量规211时的测量数据来生成校准数据。
[0142]
这一点将在后面描述。
[0143]
温度校正单元640根据校准时的温度和工件测量时的温度之间的温度差δt来计算校准数据(校正表)的校正值。
[0144]
这一点将在后面描述。
[0145]
(校正表的生成)
[0146]
首先,为了使用形状测量系统100,有必要使用主量规211进行校准。
[0147]
从校准用的主量规211的测量数据获得校准数据的算术处理例如由形状分析单元
630进行。
[0148]
(标准形式(第一尖端530a)的校准)
[0149]
首先,以探测器单元500的标准形式来校准第一尖端530a。
[0150]
这还校准坐标测量机200和探测器单元500的电气系统(例如,编码器)(例如,原点的设置)以及基准触针530的形状。基准触针530的形状的校准值(校正表)是从探测器单元500的旋转中心q到第一尖端530a的中心点的距离l1(参见图4)和第一尖端530a(基准尖端)的半径r1。
[0151]
通过第一尖端530a的校准,获得用于计算第一尖端530a的中心点的校正表s1(s
1x
,s
1y
,s
1z
)。
[0152]
这里,假设考虑校准的第一尖端530a的中心点坐标值由p
1c
(p
1cx
,p
1cy
,p
1cz
)表示。
[0153]
另外,假设机器标度读数由m(m
x
,my,mz)表示。
[0154]
机器标度读数包括坐标测量机200的编码器的读数和探测器单元500的传感器的读数,并且假设机器标度读数指示探测器单元500的旋转中心q的坐标。
[0155]
考虑校准的第一尖端530a的中心点坐标值p
1c
由校正表s1表示如下。
[0156]
p
1c
(p
1cx
,p
1cy
,p
1cz
)=m(m
x
,my,mz) s1(s
1x
,s
1y
,s
1z
)
[0157]
由于基准触针530的形状是平行于z轴的直线,因此s
1x
=s
1y
=0并且s
1z
=l1。
[0158]
p
1c
(p
1cx
,p
1cy
,p
1cz
)=m(m
x
,my,mz) s1(0,0,l1)
[0159]
注意,工件(待测量对象)的表面在靠近方向上从第一尖端530a的中心点坐标值p
1c
移位了半径r,这是众所周知的。
[0160]
第一尖端530a的半径r1和校正表s1作为第一尖端530a用的校正表存储在校正表存储单元621中(图6)。
[0161]
另外,校准作业时的环境温度tr作为校准时基准温度存储在校正表存储单元621中。
[0162]
(探测器偏离的建模)
[0163]
如果还以探测器单元500的变化形式测量工件,则也需要以变化形式进行校准。也就是说,在通过驱动探测器单元500的第一旋转机构510和第二旋转机构520使触针(530或550)升高(摆动)了预定角度的情况下对探测器单元500进行校准作业,或者在替换为异形触针(550)的情况下对探测器单元500进行校准作业。
[0164]
出于解释示例性实施例的目的,变化形式的测量尖端被称为第二尖端550a。
[0165]
如图7中所例示的,第二尖端550a是当基准触针530被替换为弯曲触针550、并且驱动第一旋转机构510和第二旋转机构520以使触针550升高并旋转摆动了预定角度时的测量尖端。
[0166]
在本示例性实施例中,获得从第一尖端530a的中心到第二尖端550a的中心的偏离值作为第二尖端550a的校准数据(校正表)(图11)。
[0167]
从第一尖端530a的中心到第二尖端550a的中心的偏离值被称为探测器偏离值s
12
。
[0168]
通过对探测器单元500的组件进行建模,探测器偏离值可以表示如下。
[0169]
首先,如图8中所例示的,假设用弯曲触针550替换基准触针530。
[0170]
这里,以90
°
弯曲的l形触针被示出为弯曲触针550的示例,但是弯曲的角度不限于90
°
。
[0171]
作为弯曲触针550的形状参数,机身轴552从旋转中心q到弯曲点551,并且机身轴552的长度由l2表示。
[0172]
另外,腿轴553从弯曲点551到尖端的中心,并且腿轴553的长度由l3表示。
[0173]
此外,腿轴553的取向和弯曲量被表示为角度参数。
[0174]
为了表示弯曲触针550的腿轴553的弯曲,引入辅助坐标系。
[0175]
图9示出辅助坐标系。
[0176]
引入包括i轴、j轴和k轴的辅助坐标系作为右手笛卡尔坐标系。
[0177]
在探测器头部主体501的第一旋转机构510和第二旋转机构520的旋转被设置为零的情况下,辅助坐标系的原点在弯曲触针550的弯曲点551处,k轴与弯曲触针550的机身轴552平行,并且i轴与第二旋转轴a2平行。
[0178]
在这种状态下,由腿轴553和k轴(k轴的负方向)形成的角度由β1表示。
[0179]
然后,由腿轴553和kj平面形成的角度由β2表示。
[0180]
假设j轴的负方向为0
°
,j轴的正方向为180
°
,并且围绕k轴的向右旋转为正。
[0181]
上述内容可以重新表述如下。
[0182]
首先,与k轴平行的直线触针的测量尖端围绕i轴旋转了β1。此后,测量尖端围绕k轴旋转了β2。然后,基准触针530的测量尖端(530a)与弯曲触针550的测量尖端(550a)重叠(或在同一方向上)。
[0183]
注意,假设将触针(530、550)附接到探测器头部主体501的卡盘部具有诸如键和键槽、突起和凹口、或部分平坦的表面等的唯一地确定触针(530、550)的安装取向的配合件(mating),并且假设弯曲触针550的腿轴553的弯曲取向和弯曲量在机器坐标系中是唯一的。
[0184]
例如,如果弯曲触针550是以90
°
弯曲的l形触针、并且腿轴553的长度为1,则l形触针的弯曲方向与角度β1和β2之间的关系在图10的表中表示。
[0185]
然后,如图7中所例示的,第一旋转机构510和第二旋转机构520旋转了必要的角度,以使测量尖端(530a)升高和摆动到进行校准的位置。在进行校准的变化形式的第一旋转机构510和第二旋转机构520的旋转角度分别是作为基准角的α
1r
和α
2r
。在这种状态下的探测器单元500的测量尖端是第二尖端550a。
[0186]
现在,使用到目前为止引入的参数,从第一尖端530a的中心到第二尖端550a的中心的偏离值(探测器偏离值)s
12
可以表示如下。
[0187]s12
=(s
12x
,s
12y
,s
12z
)
[0188]
探测器偏离的各个要素由以下表达式表示。
[0189]s12x
=-l3·
cos(α
1r
)
·
sin(β1)
·
sin(β2)-sin(α
1r
){l3·
cos(-α
2r
)
·
sin(β1)
·
cos(β2)
[0190]
sin(-α
2r
)(l3·
cos(β1) l2)}
[0191]s12y
=-l3·
sin(α
1r
)
·
sin(β1)
·
sin(β2) cos(α
1r
){l3·
cos(-α
2r
)
·
sin(β1)
·
cos(β2)
[0192]
sin(-α
2r
)(l3·
cos(β1) l2)}
[0193]s12z
=l3·
sin(α1r)
·
sin(β1)
·
cos(β2)-cos(-α
2r
)(l3·
cos(β1) l2) l1[0194]
在这些表达式中,角度值α
1r
、α
2r
、β1和β2是已知值。也就是说,α
1r
和α
2r
是探测器头
部主体501的第一旋转机构510和第二旋转机构520的旋转角度,信赖由传感器(例如,旋转编码器)获得的值。可替代地,假设探测器头部主体501的第一旋转机构510和第二旋转机构520已经被单独校准。
[0195]
值β1和β2是(弯曲)触针的规格。
[0196]
对角度信赖的原因是认为角度不受温度的影响。
[0197]
另一方面,从校准数据获得l1、l2和l3。
[0198]
从第一尖端530a的校准值获得值l1。
[0199]
稍后将描述值l2和l3。
[0200]
探测器偏离值s
12
的模型表达式存储在温度校正单元640中。
[0201]
(变化形式(第二尖端550a)的校准)
[0202]
现在,通过利用第二尖端550a测量主量规211来获得第二尖端用的校准数据(校正表)。
[0203]
通过第二尖端550a的校准,获得第二尖端550a的中心点的校正表s2(s
2x
,s
2y
,s
2z
)。
[0204]
这里,假设考虑校准的第二尖端550a的中心点坐标值由p
2c
(p
2cx
,p
2cy
,p
2cz
)表示。
[0205]
另外,假设机器标度读数由m(m
x
,my,mz)表示。
[0206]
机器标度读数包括坐标测量机200的编码器的读数和探测器单元500的传感器的读数,并且假设机器标度读数指示探测器单元500的旋转中心q的坐标。
[0207]
考虑校准的第二尖端550a的中心点坐标值p
2c
由校正表s2表示如下。
[0208]
该关系在图11中例示。
[0209]
p
2c
(p
2cx
,p
2cy
,p
2cz
)=m(m
x
,my,mz) s2(s
2x
,s
2y
,s
2z
)
[0210]
因此,获得从第一尖端530a的中心到第二尖端550a的中心的偏离值(探测器偏离值)s
12
作为用于计算第二尖端550a的中心点的校正表s2(s
2x
,s
2y
,s
2z
)与用于计算第一尖端530a的中心点的校正表s1(s
1x
,s
1y
,s
1z
)之间的差。
[0211]
换句话说,探测器偏离值s
12
可以表示如下。
[0212]s12
(s
12x
,s
12y
,s
12z
)=s2(s
2x
,s
2y
,s
2z
)-s1(s
1x
,s
1y
,s
1z
)
[0213]
已经计算探测器偏离值s
12
作为模型。
[0214]
因此,通过将其代入以上模型表达式中的s
12
(s
12x
,s
12y
,s
12z
)并求解联立方程,获得l2和l3的校准值。
[0215]
校正表存储单元621存储l2、l3以及校准时的探测器偏离值s
12
作为第二尖端550a用的校正表。
[0216]
如前所述,校准时的温度也存储在校正表存储单元621中。
[0217]
在不存在稍后描述的温度校正的情况下,为了在利用第二尖端550a测量待测量对象(工件)时获得第二尖端550a的中心点,形状分析单元630将探测器偏离值s
12
与第一尖端530a的中心点相加。
[0218]
p
2c
(p
2cx
,p
2cy
,p
2cz
)=p
1c
(p
1cx
,p
1cy
,p
1cz
) s
12
(s
12x
,s
12y
,s
12z
)
[0219]
注意,如前所述,第一尖端530a的中心点坐标值p
1c
由机器标度读数m和校正表s1确定。
[0220]
此外,通过考虑靠近方向和尖端直径来获得待测量对象的表面的位置。
[0221]
这是已知的,并且将省略其说明。
[0222]
(温度校正)
[0223]
如果测量环境温度在校准作业和实际工件测量期间是稳定且相同的,则不存在由于环境温度改变而导致的测量值的漂移。然而,如果测量环境温度波动,则发生温度漂移。
[0224]
本示例性实施例旨在利用温度校正单元640校正过去尚未应对的探测器(触针)的线性膨胀。
[0225]
例如,如图13中所例示的,如果弯曲触针550的机身轴552和腿轴553随着环境温度增加而延长,则测量尖端(第二尖端550a)的位置移位了该量。在这种情况下,如果要通过加上来自第一尖端530a的探测器偏离值s
12
来获得第二尖端550a的位置,则因为探测器偏离值已经改变,所以无法获得第二尖端550a的正确位置。图14通过假定地叠加线性膨胀之前和之后的第一尖端530a的位置以使得容易理解地例示探测器偏离变化。
[0226]
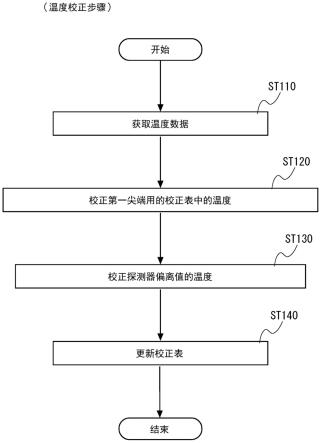
图12是示出温度校正步骤的过程的流程图。
[0227]
首先,温度校正单元640获取测量环境温度(st110)。坐标测量机200可以配备有温度传感器,或者可以使用测量室中的温度传感器来获得温度。温度校正单元640获取校准时的温度与当前测量环境的温度之间的差δt作为温度数据。
[0228]
然后,温度校正单元640校正第一尖端用的校正表s1中的温度(st120)。
[0229]
由于第一尖端530a附接到直线的基准触针530的前端,因此第一尖端530a用的校正表s1中的温度校正用于加上由线性膨胀引起的基准触针530的长度l1的膨胀和收缩。假设线性膨胀系数为k1,并且基准触针530在当前温度t下的长度为l
1t
。
[0230]
l
1t
=l1 δl1=l1(1 k1δt)
[0231]s1t
(s
1tx
,s
1ty
,s
1tz
)=s
1t
(0,0,l
1t
)
[0232]
温度校正单元640将温度校正之后的第一尖端用的校正表s
1t
连同校正时的温度数据一起存储在校正表存储单元621中。
[0233]
温度校正单元640还校正探测器偏离值s
12
的温度(st130)。
[0234]
已经对探测器偏离值s
12
进行了建模,并且通过将线性膨胀与l1、l2和l3相加来获得经温度校正的探测器偏离值s
12t
。
[0235]
假设弯曲触针550的线性膨胀系数为k2,并且机身轴552和腿轴553在当前温度t的长度分别为l
2t
和l
3t
。
[0236]
l
2t
=l2 δl2=l2(1 k2δt)
[0237]
l
3t
=l3 δl3=l3(1 k2δt)
[0238]
通过将温度校正之后的l
1t
、l
2t
和l
3t
代入模型来获得经温度校正的偏离表s
12t
。
[0239]
温度校正之后的偏离表s
12t
=(s
12tx
,s
12ty
,s
12tz
)
[0240]s12tx
=-l
3t
·
cos(α
1r
)
·
sin(β1)
·
sin(β2)-sin(α
1r
){l
3t
·
cos(-α
2r
)
·
sin(β1)
·
cos(β2)
[0241]
sin(-α
2r
)(l
3t
·
cos(β1) l
2t
)}
[0242]s12ty
=-l
3t
·
sin(α
1r
)
·
sin(β1)
·
sin(β2) cos(α
1r
){l
3t
·
cos(-α
2r
)
·
sin(β1)
·
cos(β2) sin(-α
2r
)(l
3t
·
cos(β1) l
2t
)}
[0243]s12tz
=l
3t
·
sin(α
1r
)
·
sin(β1)
·
cos(β2)-cos(-α
2r
)(l
3t
·
cos(β1) l
2t
) l
1t
[0244]
温度校正单元640将温度校正之后的偏离表s
12t
连同校正时的温度数据一起存储在校正表存储单元621中(st140)。
[0245]
(校正测量值的计算)
[0246]
假设测量环境温度已经从校准时的温度到温度t改变了δt。
[0247]
当在该温度环境中利用弯曲触针550测量待测量对象(工件)的形状时,形状分析单元630使用经温度校正的校正表来获得经温度校正的测量值。
[0248]
用于获得测量值的操作由形状分析单元630如下进行。
[0249]
通过将第一尖端用的校正表s
1t
与机器标度读数m(m
x
,my,mz)相加,(虚拟地)获得经温度校正的第一尖端530a的中心坐标。然后,通过将经温度校正的偏离表s
12t
与第一尖端530a的中心坐标相加,(虚拟地)获得作为校准对象的变化形式中的经温度校正的第二尖端550a的中心坐标(参见图13)。此外,由于第一旋转机构510和第二旋转机构520的旋转角度α1和α2可用作采样测量值,因此测量尖端的中心当前位于从基准角度α
1r
和α
1r
旋转了(α
1-α
1r
)、(α
2-α
2r
)的位置处。
[0250]
另外,工件(待测量对象)的表面位于考虑了靠近方向和尖端直径的位置处。
[0251]
尽管上述说明用于校正探测器单元500的线性膨胀,但是可以进一步加上(减去)编码器标度的线性膨胀,以获得被校正到校准时的温度或所确定的特定温度(例如,20℃或25℃)的测量值。
[0252]
根据上述的本示例性实施例,可以校正过去尚未应对的探测器(触针)的线性膨胀,并获得准确的测量值。
[0253]
此外,即使测量环境温度改变,也可以通过本示例性实施例中的探测器单元500的温度校正来获得准确的测量值,并且不需要频繁地校准所有探测器(触针)或变化形式。因此,可以显著减少校准的次数。
[0254]
此外,即使进行校准作业,也不校准所有探测器和所有变化形式,而是仅定期校准基准触针530,并且可以根据需要校准其他探测器(例如,第二尖端)。
[0255]
本发明不限于上述示例性实施例,而是可以在不脱离主旨的情况下根据需要进行修改。
[0256]
在以上示例性实施例中,例示双轴探测器单元500,但是探测器单元500自身没有必要一定具有旋转驱动轴。
[0257]
本发明可广泛应用于利用相对于基准触针530的第一尖端530a具有偏离的测量尖端进行测量的情况。
[0258]
通过将包含程序的记录介质(例如,非易失性记录介质)直接插入计算机中,或者通过从外部附接到计算机的读取装置读取记录介质上的信息,可以将实现对探测器的温度校正的(控制)程序安装在计算机中。该程序可以通过诸如lan线缆或电话线等的通信线路提供给计算机,或者无线地安装。
[0259]
交叉引用
[0260]
本技术基于并要求于2021年6月4日提交的日本专利申请2021-094809(das码:6e57)的优先权,其公开内容通过引用整体并入本文。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。